1.本发明属于包装技术领域,特别涉及一种基于纸浆纤维的外形不规则物品内包装塑造装置。
背景技术:
2.包装作为物品的重要附属物,起到承载、保护作用。一般的物品因其规格统一的特点,其包装通常可通过批量生产。而一些特殊的贵重物品例如文物等,由于外形的特异性,传统的内包装与其外形的契合度往往不高,影响包装效果。
技术实现要素:
3.为了克服上述现有技术的缺点,本发明的目的在于提供一种基于纸浆纤维的外形不规则物品内包装塑造装置,以纸浆纤维为原料,根据物品的三维外形轮廓,由装置为物品塑造“量身定制”的内包装,尤其对于一些造型独特的文物,可进一步提升保护效果。具有绿色环保、安全稳定、实施效果好的特点。
4.为了实现上述目的,本发明采用的技术方案是:
5.一种基于纸浆纤维的外形不规则物品内包装塑造装置,包括底座,底座上有工作台,工作台为包装塑造的直接载体,设置于x向的同步带上,第一步进电机的输出连接同步带的同步轮,底座的左右两个边侧立有两条竖直的z轴丝杠,每条z轴丝杠的底端通过联轴器一连接第二步进电机,两条z轴丝杠之间设置有y轴丝杠,其中y轴丝杠的一端通过联轴器连接第三步进电机,y轴丝杠上通过螺母连接件二安装有输浆通道,输浆通道的挤浆口开口朝向其下方的工作台。
6.所述在工作台的y向两个边侧有两条柱形通孔,柱形通孔内表面光滑,两根滑杆各穿其中,滑杆两端固定,工作台能够在第一步进电机、同步轮、同步带的带动下,沿滑杆在x轴平稳运动。
7.所述工作台表面附有冷却板,以帮助纸浆包装冷却成型。
8.所述底座呈口字形,对整个装置起到支撑作用。
9.所述y轴丝杠的另一端和第三步进电机分别通过一个螺母连接件一安装于一条z轴丝杠上。
10.所述挤浆口套有加热套,将纸浆加热后挤出,塑造包装。
11.进一步地,本发明还包括控制模块、三维扫描仪和主控计算机,所述三维扫描仪用于获取待包装物的点云数据,所述主控计算机对所述点云数据进行预处理、特征匹配、数据分割,重构拟合曲面,建立内包装的三维模型,生成控制三组传动系统运动的执行代码,通过串口将执行代码下载到控制模块中,控制模块包含微处理器和驱动模块,控制第一步进电机、第二步进电机、第三步进电机以及挤浆口的工作,使挤浆口在三维欧式空间自由运动,挤出纸浆纤维进行物品内包装的塑造。
12.本发明还提供了利用该基于纸浆纤维的外形不规则物品内包装塑造装置的塑造
方法,其特征在于,包括以下步骤:
13.步骤一:通过三维扫描仪对待包装物品的三维表面进行扫描,输出包含物体表面三维特征的点云数据;
14.步骤二:利用主控计算机对点云数据进行预处理、特征匹配、数据分割,重构拟合曲面,建立内包装的三维模型,即stl文件;
15.步骤三:主控计算机根据所建立的物体三维模型,生成控制三组传动系统运动的执行代码;
16.步骤四:通过串口将执行代码下载到控制模块中;
17.步骤五:控制模块控制第一步进电机、第二步进电机、第三步进电机的运转,带动挤浆口在三维欧式空间自由运动,通过输浆通道的进浆口获取纸浆纤维,通过挤浆口的加热套对纸浆纤维加热,并由挤浆口将热纸浆挤出,冷却后完成物品内包装的塑造。
18.与现有技术相比,本发明的有益效果是:
19.1、绿色环保。内包装原料采用纸浆纤维,资源丰富,成本低,可在自然环境中自行降解,可再生无污染。
20.2、安全稳定。纸浆纤维密封性能好,可塑性强,可保证被包装的贵重物品不受破坏。
附图说明
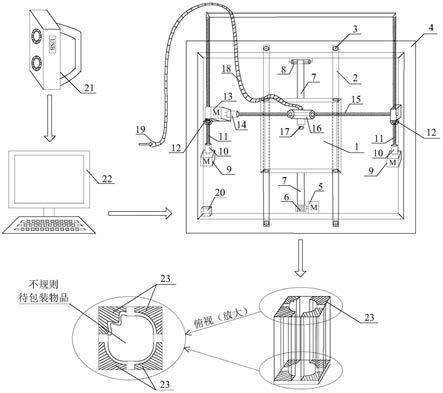
21.图1为发明的结构示意图。
22.图2为装置的三维空间传动分解示意图一。
23.图3为装置的三维空间传动分解示意图二。
24.图4为装置的三维空间传动分解示意图三。
25.图5为装置的工作流程图。
具体实施方式
26.下面结合附图和实施例详细说明本发明的实施方式。
27.如图1、图2、图3和图4所示,本发明为一种基于纸浆纤维的外形不规则物品内包装塑造装置,包括底座4和工作台1,其中,底座4可呈“口”字形,以对整个装置起到支撑作用。
28.工作台1为包装塑造的直接载体,其表面可附有冷却板,以帮助纸浆包装冷却成型。工作台1设置于x向的同步带7上,同步带7的同步轮6安装在第一步进电机5的输出转轴上,第一步进电机5带动同步轮6转动,进而带动同步带7乃至工作台1在x轴(笛卡尔右手坐标系)的运动,工作台1可高于底座4的顶面,亦可略低于底座4的顶面。其中同步带7的一侧连接同步轮6,另一侧可连接轴承8,并固定在工作台1下方,使工作台1可以在x轴自由移动。
29.为保证工作台1的平稳运动,在其y向两个边侧有两条柱形通孔,柱形通孔内表面光滑,两根滑杆2各穿其中,滑杆2两端以螺钉3固定于底座4上,滑杆2的表面光滑,对工作台1起到支撑和辅助滑动的作用。因此工作台1能够在第一步进电机5、同步轮6、同步带7及轴承8的带动下,沿滑杆2在x轴平稳运动。
30.底座4的左右两个边侧立有两条竖直的z轴丝杠11,每条z轴丝杠11的底端通过联轴器一10连接第二步进电机9,第二步进电机9带动实现装置的z轴自由运动。
31.两条z轴丝杠11之间设置有y轴丝杠15,其中y轴丝杠15的一端通过联轴器14连接第三步进电机13,y轴丝杠15的另一端和第三步进电机13分别通过一个螺母连接件一12安装于一条z轴丝杠11上,第三步进电机13带动实现装置的y轴自由运动。
32.y轴丝杠15上通过螺母连接件二16安装有输浆通道18,输浆通道18的挤浆口17开口朝向其下方的工作台1,其中螺母连接件二16安装在y轴丝杠15上,可用于固定输浆通道18以及其挤浆口17,挤浆口17套有加热套,将纸浆加热后挤出,塑造包装。输浆通道18的进浆口19作为包装材料纸浆纤维的输入端,通过输浆通道18将纸浆传输至挤浆口17。
33.根据上述结构,可控制三个电机的动作以及挤浆口17的动作,挤出纸浆纤维在工作台1上形成内包装23。
34.具体参阅图2、图3以及图4,装置的三维空间传动方法:
35.参阅附图2,装置的x轴(笛卡尔右手坐标系下)传动示意图。同步轮6随第一步进电机5的转动而转动,带动同步带7一起运动,轴承8随之一起转动。在第一步进电机5、同步轮6、同步带7和轴承8的配合下,辅之滑杆2(由螺钉3可靠固定在底座4上)的支撑滑动作用,工作台1随着同步带7在x轴自由运动,即前后移动。
36.参阅附图3,装置的z轴(笛卡尔右手坐标系下)传动示意图。耦合器10随第二步进电机9的转动而转动,且带动z轴丝杠11一起转动,与螺母连接件一12共同构成z轴丝杠传动系统,实现挤浆口17在z轴的自由运动,即上下移动。
37.参阅附图4,装置的y轴(笛卡尔右手坐标系下)传动示意图。耦合器14随第三步进电机13的转动而转动,同时带动y轴丝杠15一起转动,与螺母连接件二16共同构成y轴丝杠传动系统,螺母连接件二16上固定挤浆口17,带动挤浆口17在y轴自由运动,即左右移动。
38.x、y、z三组传动系统协调工作,带动挤浆口17按既定程序在三维欧式空间自由运动,通过进浆口19和输浆通道18获取纸浆纤维,经挤浆口17的加热套加热后,由挤浆口17挤出纸浆纤维,最后通过工作台1表面的冷却板冷却成型后,完成物品内包装23的塑造。
39.进一步地,在本发明的优选实施例中,为实现完整的自动控制流程,本发明还包括控制模块20、三维扫描仪21和主控计算机22,三维扫描仪21用于获取待包装物的点云数据,主控计算机22通过usb接口等方式接收对点云数据,并进行预处理、特征匹配、数据分割,重构拟合曲面,建立内包装23的三维模型,生成控制三组传动系统运动的执行代码,通过串口将执行代码下载到控制模块20中,控制模块20包含微处理器和驱动模块,控制第一步进电机5、第二步进电机9、第三步进电机13以及挤浆口17的工作,使挤浆口17在三维欧式空间自由运动,挤出纸浆纤维进行物品内包装23的塑造。
40.参阅附图5,具体包括以下步骤:
41.步骤一:通过三维扫描仪21对待包装物品的三维表面进行扫描,输出包含物体表面三维特征的点云数据;
42.步骤二:利用主控计算机22对点云数据进行预处理、特征匹配、数据分割,重构拟合曲面,建立内包装23的三维模型,即stl文件;步骤三:主控计算机22根据所建立的物体三维模型,生成控制三组传动系统运动的执行代码;
43.步骤四:通过串口将执行代码下载到控制模块20中;
44.步骤五:控制模块20控制第一步进电机5、第二步进电机9、第三步进电机13的运转,带动挤浆口17在三维欧式空间自由运动,通过输浆通道18的进浆口19获取纸浆纤维,通
过挤浆口17的加热套对纸浆纤维加热,并由挤浆口17将热纸浆挤出,经工作台1表面的冷却板冷却后,完成物品内包装23的塑造。
45.针对步骤二和步骤三,具体地,在对物品进行三维扫描时,由于外界环境中存在不可避免的干扰,如噪声等,会使物品的点云模型出现异常点,影响对物品实际轮廓的准确建模。主控计算机22通过逆向工程软件如surfacer等,可对物品的点云数据进行优化处理。设定误差限,可通过最小二乘法对物体轮廓线进行拟合,根据外形轮廓确定曲线阶次,计算各数据点与拟合曲线的距离,将误差过大的孤点进行剔除。通过最小二乘滤波、高斯滤波或卡尔曼滤波等方法对点云数据进行去噪,结合插补策略对扫描仪盲区进行插补校正,进一步完善物体的点云模型,提高曲面拟合精度。
46.根据待包装物品的内包装安全等级要求,如内包装厚度和内包装内壁与物品的间隙等,设置物体内包装的相应参数。具体地,根据内包装内壁与物品的间隙参数,对物品点云轮廓进行等距扩大,得到第二点云轮廓,所述第二点云轮廓将形成物品内包装的内壁,与物品的外形形状契合,仅大小不同;根据内包装的厚度要求,在第二点云轮廓的基础上再次扩大,得到第三点云轮廓,所述第三点云轮廓将形成内包装的外壁,可采用任何形状,如方形(这里主要考虑与常见的方形运输箱契合)。所述第二点云轮廓和第三点云轮廓共同构成物品内包装的点云数据,通过有效特征点的提取建立物品内包装的点云模型。以“四块式”结构的内包装为例,对上述处理后得到的内包装点云模型进行进一步数据分割,将内包装点云数据分割为四个部分(使物品可立于其中,受到内包装的缓冲保护),完成拟合曲面的重构。接下来对各个部分进行切片处理,通过cura等软件可将三维模型装换为若干等距的二维平面切片,并输出基于该物品内包装模型的用以控制三组传动系统运动的执行代码。在实际实施时,基于纸浆纤维粘度大的优点,可通过分层塑造并冷却自动粘合的方式,完成物品内包装的成型塑造。内包装作为物品本体和外包装之间的缓冲部分,在实际应用时,“四块式”内包装将物品夹持于其间,对物品起到直接的缓冲保护作用。进一步地,物品立于内包装四个部分之间后,可使用绳、线、带等对内包装的四个部分进行捆扎,即“四合一”操作,辅助固定,提升保护效果;取出物品时,只需解除捆扎,即“一分四”操作,内包装解除,可取出物品。