1.本发明涉及一种用于测试电梯中的机械制动器的方法。
背景技术:
2.电梯可以包括轿厢、竖井、提升机械、提升绳索和配重。单独的或一体的轿厢框架可以围绕轿厢。
3.提升机械可以定位于竖井中。提升机械可以包括电驱动器、牵引滑轮和机械制动器。电驱动器可以包括电动机和控制电动机的驱动单元。轿厢框架可以经由牵引滑轮通过提升绳索连接到配重。电动机可以使牵引滑轮旋转以在竖井中上下移动轿厢。机械制动器可以停止牵引滑轮的旋转,从而停止电梯轿厢的移动。
4.轿厢框架可以由引导装置支撑在在竖井中在竖直方向上延伸的导轨处。导轨可以利用紧固支架附接到竖井中的侧壁结构。当轿厢在竖井中向上和向下移动时,引导装置将轿厢在水平面中保持在适当位置。配重可以以相应的方式被支撑在附接到竖井的壁结构的导轨上。
5.轿厢可以在建筑物的平台之间运输人员和/或货物。竖井可以形成为使得壁结构由实心壁形成,或者使得壁结构由开放钢结构形成。
6.机械制动器可由至少一个机电制动器形成。机械制动器构成电梯的安全设备。机械制动器向牵引滑轮或提升机械的旋转轴施加制动力,以停止提升机械的移动,从而也停止电梯轿厢的移动。机械制动器可包括至少两个制动器,例如两个、三个或四个制动器。机械制动器的尺寸应符合en 81-20:2014的要求,使得当轿厢以额定速度和额定负载加上25%的过载(即125%的负载)向下行进时能够停止电梯机械。如果一个制动器故障,则另一个制动器仍应能在额定负载(即100%的负载)下使电梯轿厢减速、停止并保持静止。机械制动器构成电梯中的安全设备,因此应定期进行测试以确保其正常工作。
7.电磁制动器可以包括框架部和可移动地附接到框架部的电枢部。弹簧装置可以布置成在框架部和电枢部之间操作,以便在启动机械制动器时将电枢部推离框架部。作用在旋转制动表面上的制动靴可以附接到电枢部。旋转制动表面可以连接到牵引滑轮。当启动机械制动器时,制动靴被抵着旋转制动表面推动。电磁装置可以进一步布置在框架部中。电磁装置的磁场克服弹簧装置的力将电枢部拉向框架部。当电磁体被激活时,机械制动器被停用,即,制动靴被从制动表面拖开。另一方面,当电磁体被停用时,机械制动器被激活,即,制动靴被推向制动表面。机械制动器可以是靴式制动器、鼓式制动器、盘式制动器或任何相应的机械制动器。
8.现有技术的制动测试是基于当轿厢停在平台时打开机械制动器中的一个制动器的原理。因此,机械制动器中的其余制动器将受到源自重力(轿厢和配重之间的不平衡)或源自重力和提升机械中电机产生的附加力的力。监测基于检测提升机械在所述状态下的移动。可以一次对机械制动器中的每个制动器进行测试。
技术实现要素:
9.本发明的目的是一种用于测试电梯中机械制动器的改进的方法。
10.根据本发明的用于测试电梯中的机械制动器的方法在权利要求1中限定。
11.电梯包括可移动地布置在竖井中的轿厢、用于移动轿厢的电动机、用于控制电动机的驱动单元以及用于制动和保持轿厢的机械制动器。
12.测试机械制动器的方法包括
13.通过用驱动单元调节电动机的驱动扭矩,根据驱动曲线利用电动机使轿厢移动,
14.在轿厢正在移动时生成到机械制动器的制动器落下命令,
15.监测电动机的驱动扭矩,以及
16.在从生成到机械制动器的制动器落下命令的预定时间段期间,如果电动机的驱动扭矩没有遵循期望的驱动扭矩变化模式,则指示机械制动器没有正常工作,否则指示机械制动器正常工作。
17.驱动单元可以计算在建筑物中的平台之间移动的轿厢的驱动曲线。驱动单元可以包括速度控制器。速度控制器可以调节电动机的驱动扭矩以实现轿厢的所述驱动曲线。
18.机械制动器可包括至少两个制动器,例如两个、三个或四个制动器。机械制动器的尺寸应使得当轿厢以额定速度和额定负载加上25%的过载(即125%的负载)向下行进时能够停止电梯机械。如果一个制动器故障,则另一个制动器仍应能够在额定负载(即100%的负载)下减速、停止电梯轿厢并保持电梯轿厢静止。用于测试机械制动器功能的方法可以存储在电梯控制器的存储器中。
19.因此在电梯轿厢正在运行时向机械制动器发出制动器落下命令。可以监测电动机的驱动扭矩。如果机械制动器工作正常,则机械制动器将在特定落下延迟后抵接提升机械的牵引滑轮,并开始对提升机械的移动进行制动。同时,驱动单元的速度控制器试图通过增加驱动扭矩来保持当前的速度条件。可以监测驱动扭矩或驱动扭矩参考。如果驱动转矩或驱动转矩参考形成与机械制动器的预期制动扭矩一致的增加模式,则可以得出机械制动器正常工作的结论。否则,如果在预定时间段内驱动扭矩没有按预期增加,则可以得出机械制动器没有正常工作的结论。在后一种情况下,电梯可能会停止使用和/或可能会向远程服务中心生成维护请求。
20.可以在轿厢在电梯轿厢的轻方向上行驶时进行制动测试。轻方向是指轿厢在竖井中向上行驶使得轿厢为空的,并且在竖井中向下行驶使得使轿厢满载。制动测试期间的轿厢速度可以是轿厢的标称速度或轿厢的其他一些较低的测试速度。
21.电梯的绳索的重量可能没有得到补偿,使得电梯的不平衡程度可能在竖井的不同部分有所不同。因此,在制动测试中机械制动器刚落下之前轿厢的位置以及电动机的扭矩可以被记录在测试中。这将使在测试期间确定电梯的不平衡情况成为可能。该测试可以在电梯启动期间在电梯不平衡达到最小值的竖井中的位置和电梯不平衡达到最大值的竖井中的位置进行。
22.在一次测试驱动期间,可以测试机械制动器的一个或多个制动器。当待测试的制动器通过测试时,控制系统拉起所述制动器(停用制动器)并落下(启用)下一个制动器。无需在测试之间停止电梯。在一些其他实施例中,可以同时测试制动器的子集,即,多于一个但少于一组制动器中的所有制动器。
23.如果机械制动器包括两个制动器,则可以在一次电梯运行期间交替测试两个制动器,从而在机械制动器中的另一个制动器保持打开的同时向待测制动器发出制动器落下命令。
24.测量结果和可接受限度可以传输到云服务器。因此,可以通过算法从云服务器中的数据观察趋势,并且可以确定维护措施的正确时间。
25.在现代矢量控制电驱动器中,电机电流或电机电流参考与电机的驱动转矩成正比,尤其是在永磁电机的情况下。因此,电机电流或电机电流参考是实际上可以被监测的参数。
26.在同一测试期间,还可以测量机械制动器的激活延迟(落下延迟)。这可以通过测量从发出制动器落下命令的时刻开始到检测到驱动扭矩的变化模式的时刻结束的时间延迟来完成。接合机械制动器的时间延迟不应太长。因此,如果测量的时间延迟超过给定阈值,则应发出机械制动器操作异常的指示。
27.制动测试成功完成后,电梯可以不间断地继续运行到目的地平台。
28.或者,在检测到期望的驱动扭矩变化模式时,可以中断驱动扭矩,从而机械制动器将使轿厢停止。可以记录轿厢的停车距离。通过验证轿厢的停止距离是否在期望限度内,可以获得机械制动器的附加诊断数据。
29.制动器落下命令意味着机械制动器的激活。机械制动器可以通过停用机械制动器中的电磁体来激活,即通过切断到电磁体的电流供应来激活。机械制动器中的弹簧装置开始将一个或多个制动靴压靠到旋转制动表面,从而对提升机械的移动进行制动。代替靴式制动器,鼓式制动器、盘式制动器或任何相应的机械制动器。
30.现有技术的制动器测试没有测量机械制动器的落下延迟。新颖的制动测试使测量机械制动器的落下延迟或激活延迟成为可能。重要的是要监测机械制动器的落下延迟,以确保机械制动器在所有情况下都能正常工作。
31.现有技术的制动测试测量静态情况下的制动力,即当执行制动测试时提升机械处于静止状态。然而,制动器在动态情况下产生的扭矩可能与制动器在静态情况下产生的扭矩不同。新颖的制动测试使测量机械制动器的动态扭矩成为可能。
32.污染物可能会在机械制动器中的制动靴的摩擦表面积聚。在制动事件开始时,污染物可能对制动器的特性产生影响。在新颖的制动测试期间,污染物将有时间从制动靴的摩擦表面磨损。
33.新颖的制动测试还可以消除制动器的额外磨损,因为可以在较低的测试速度下进行测试。
附图说明
34.下面将参考附图通过优选实施例更详细地描述本发明,其中
35.图1示出了电梯的侧视图,
36.图2示出了电梯机械制动系统的侧视图,
37.图3示出了用于测试电梯的机械制动器的流程图。
具体实施方式
38.图1示出了电梯的侧视图。
39.电梯可以包括轿厢10、电梯竖井20、提升机械30、提升绳索42和配重41。单独的或一体的轿厢框架11可以围绕轿厢10。
40.提升机械30可以位于竖井20中。提升机械可以包括电驱动器31,32、牵引滑轮33和机械制动器100。电驱动器31、32可以包括电动机32和控制电动机32的驱动单元31。电动机32可以是永磁电动机,驱动单元31可以是变频器。驱动单元31控制电动机32并且电动机32使牵引滑轮33旋转。轿厢框架11可以经由牵引滑轮33通过提升绳索42连接至配重41。由电动机32导致的牵引滑轮33的旋转将使轿厢10在竖直方向z上在竖直延伸的电梯竖井20中向上和向下移动。机械制动器100可以停止牵引滑轮33的旋转,从而停止电梯轿厢10的移动。
41.轿厢框架11可以由引导装置27支撑在在竖井20中在竖直方向上延伸的导轨25处。引导装置27可以包括当轿厢10在电梯竖井20中上下移动时在导轨25上滚动的辊子或在导轨25上滑动的滑动靴。导轨25可以利用紧固支架26附接到电梯竖井20中的侧壁结构21。当轿厢10在电梯竖井20中向上和向下移动时,引导装置27将轿厢10在水平面中保持在适当位置。配重41可以以相应的方式被支撑在附接到竖井20的壁结构21的导轨上。
42.轿厢10可以在建筑物的平台之间运输人员和/或货物。电梯竖井20可以形成为使得壁结构21由实心壁形成,或者使得壁结构21由开放钢结构形成。
43.电梯可以由主控制器300控制。
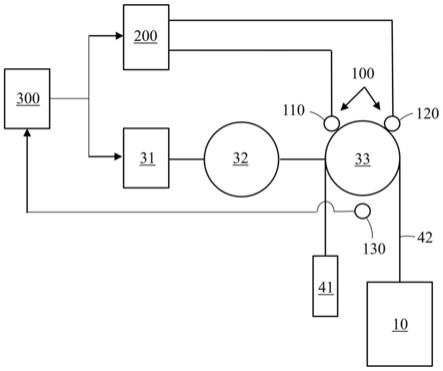
44.图2示出了电梯机械制动系统的侧视图。
45.轿厢10可以悬挂在牵引滑轮33的第一侧,而配重41可以悬挂在牵引滑轮33的相反的第二侧。提升绳索42可以从轿厢10经过牵引滑轮33到配重41。牵引滑轮33可由电动机32驱动。电动机32可由同步永磁电动机形成。电动机32可由驱动单元31控制。驱动单元31可以由变频器形成。
46.机械制动器100可以包括作用在牵引滑轮33上的两个电磁制动器110、120。电磁制动器110、120可以由机械制动控制器200控制。
47.电梯、驱动单元31和制动控制器200可由主控制器300控制。牵引滑轮33可设有运动测量设备130。运动测量设备130可以由转速计形成。
48.图3示出了用于测试电梯的机械制动器的流程图。
49.步骤501包括通过调整电动机的驱动扭矩,根据驱动曲线利用电动机使轿厢移动。电动机可以由驱动单元控制。驱动单元可由电梯的主控制器控制。
50.步骤502包括生成到机械制动器的制动器落下命令。制动器落下命令可以由机械制动控制器和/或主控制器产生。
51.步骤503包括监测电动机的驱动扭矩。这实际上可以通过监测电动机的电流来完成。在现代矢量控制电驱动器中,电动机的电动机电流与电动机的驱动转矩成正比,尤其是在永磁电机的情况下。
52.步骤504包括确定在从产生到机械制动器的制动器落下命令开始的预定义时间段期间电动机的驱动扭矩是否遵循期望的变化模式。
53.步骤505包括,如果步骤504的回答为是,则指示机械制动器正常工作。
54.步骤506包括,如果步骤504的回答为否,则指示机械制动器没有正常工作。
55.本发明的用途不限于附图中公开的电梯。本发明可用于任何类型的电梯,例如包括机房或没有机房的电梯,包括配重或没有配重的电梯。配重可以定位在电梯竖井的任一侧壁或两侧壁上或后壁上。驱动单元、电动机、牵引滑轮和机械制动器可定位于机房中或电梯竖井中的某个位置。轿厢导轨可以定位在所谓的双肩背式电梯(ruck-sack elevator)中的竖井的相对侧壁上或竖井的后壁上。
56.对于本领域技术人员而言显而易见的是,随着技术的进步,可以以各种方式来实现本发明的构思。本发明及其实施例不限于上述示例,而是可以在权利要求的范围内变化。