1.本发明涉及制造机械的控制系统,具体而言,尤其涉及一种自行式电驱 动混铁水车的智能控制系统及方法。
背景技术:
2.目前,混铁水车运输主要依靠内燃机车牵引来完成,在运输过程中由于 内燃机车的废气排放以及内燃机车自身移动过程中也需要消耗能量,使得混 铁水车的运输机制的能源效率低下同时对空气造成污染。
技术实现要素:
3.根据上述提出的依靠内燃机车牵引实现混铁水车的运输能源效率低下的 技术问题,而提供一种自行式电驱动混铁水车的智能控制系统及方法。为了 大幅提高混铁水车运输环节的节能性和环保性,本发明提供了仅依靠电能驱 动的混铁水车的智能控制系统及方法。
4.本发明采用的技术手段如下:
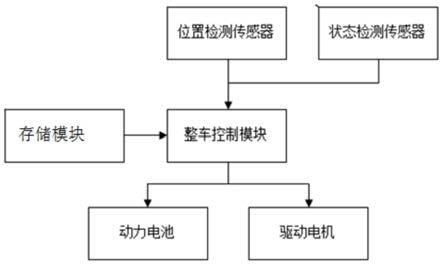
5.一种自行式电驱动混铁水车的智能控制系统,包括:用于检测车辆实时 位置的位置传感器、用于检测车辆实时运行状态的运动传感器、用于存储控 制列表的存储模块、用于控制整车运行的控制模块、为整车各模块提供电能 的动力电池以及驱动车辆执行机构的若干个驱动电机,其中所述控制列表用 于存储控制参数,所述车辆实时位置和车辆实时运行状态均与所述控制参数 对应;
6.所述位置传感器和运动传感器分别连接所述控制模块的检测端口,所述 存储模块连接所述控制模块的查询端口,所述动力电池连接和驱动电机分别 连接于所述控制模块的控制端口;
7.工作时,所述控制模块根据所述位置传感器及运动传感器检测的车辆实 时位置信息以及车辆实时运行状态信息查询控制列表,从而获得相应的控制 参数,所述控制模块根据获得的控制参数生成控制信号分别控制动力电池和 驱动电机的工作状态。
8.进一步地,所述车辆实时运行状态包括车辆行驶方向、车辆速度以及车 辆加速度。
9.进一步地,所述车辆执行机构包括车轮和空压泵。
10.进一步地,所述控制列表的首行代表车辆实时位置,首列代表车辆实时 运行状态,且所述控制列表存储的控制参数为对应车辆实时位置和车辆实时 运行状态的最优工作状态参数。
11.进一步地,所述最优工作状态参数为通过离线方式仿真获取的在设定工 况下实验获得。
12.本发明还公开了一种自行式电驱动混铁水车的智能控制方法,基于上述 任意一项所述的自行式电驱动混铁水车的智能控制系统实现,包括以下步骤:
13.通过位置传感器检测车辆实时位置;通过运动传感器检测车辆实时运行 状态;
14.根据获取的车辆实时位置和车辆实时运行状态查询控制列表,从而获取 相应的控制参数;
15.根据所述控制参数控制动力电池和驱动电机运行。
16.进一步地,所述控制列表的首行代表车辆实时位置,首列代表车辆实时 运行状态,且所述控制列表存储的控制参数为对应车辆实时位置和车辆实时 运行状态的最优工作状态参数。
17.进一步地,所述最优工作状态参数为通过离线方式仿真获取的在设定工 况下实验获得。
18.较现有技术相比,本发明具有以下优点:
19.本发明应用全局最优控制策略,使自行式电驱动混铁水车动力控制系统 的效率得到最大程度的优化,进而让设备得到如下提升:1、最大程度降低整 车能耗,提高设备经济性;2、最大程度降低整车全生命周期成本,提高产品 的竞争力。
附图说明
20.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实 施例或现有技术描述中所需要使用的附图做以简单地介绍,显而易见地,下 面描述中的附图是本发明的一些实施例,对于本领域普通技术人员来讲,在 不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
21.图1为本发明自行式电驱动混铁水车动力控制系统结构示意图。
22.图2为本发明自行式电驱动混铁水车动力系统控制方法流程图。
23.图中:1、位置检测传感器;2、状态检测传感器;3、存储模块;4、整 车控制模块;5、动力电池;6、驱动电机。
具体实施方式
24.需要说明的是,在不冲突的情况下,本发明中的实施例及实施例中的特 征可以相互组合。下面将参考附图并结合实施例来详细说明本发明。
25.为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发 明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述, 显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。 以下对至少一个示例性实施例的描述实际上仅仅是说明性的,决不作为对本 发明及其应用或使用的任何限制。基于本发明中的实施例,本领域普通技术 人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明 保护的范围。
26.需要注意的是,这里所使用的术语仅是为了描述具体实施方式,而非意 图限制根据本发明的示例性实施方式。如在这里所使用的,除非上下文另外 明确指出,否则单数形式也意图包括复数形式,此外,还应当理解的是,当 在本说明书中使用术语“包含”和/或“包括”时,其指明存在特征、步骤、 操作、器件、组件和/或它们的组合。
27.如图1所示,本发明提供了一种自行式电驱动混铁水车的智能控制系统, 包括:用于检测车辆实时位置的位置传感器、用于检测车辆实时运行状态的 运动传感器、用于存储
控制列表的存储模块、用于控制整车运行的控制模块、 为整车各模块提供电能的动力电池以及驱动车辆执行机构的若干个驱动电机, 其中控制列表用于存储控制参数,车辆实时位置和车辆实时运行状态均与控 制参数对应;位置传感器和运动传感器分别连接控制模块的检测端口,存储 模块连接控制模块的查询端口,动力电池连接和驱动电机分别连接于控制模 块的控制端口;工作时,控制模块根据位置传感器及运动传感器检测的车辆 实时位置信息以及车辆实时运行状态信息查询控制列表,从而获得相应的控 制参数,控制模块根据获得的控制参数生成控制信号分别控制动力电池和驱 动电机的工作状态。
28.其中,车辆实时运行状态包括车辆行驶方向、车辆速度以及车辆加速度, 上述数据通过电机内置转速编码器及从动轮同轴转速编码器测得。车辆执行 机构包括车轮和空压泵。
29.本发明中存储模块存储的控制列表首行代表车辆实时位置,首列代表车 辆实时运行状态,且所述控制列表存储的控制参数为对应车辆实时位置和车 辆实时运行状态的最优工作状态参数。其中,最优工作状态参数为通过离线 方式仿真获取的在设定工况下实验获得。
30.具体来说,整车控制模块根据传感器单元传送的数据信息,通过计算整 车质心位置和货物质量获得在不同质心位置、不同货物质量及不同轨迹位置 下查找过的最优控制方案,包括走行电机转速、转矩、气泵电机转速以及电 机散热器转速等参数表征。其中最优控制方案是将整车模型采用离线仿真运 行与设定的工况下获得的全局最优控制策略。将全局最优控制策略制作为车 辆在不同行驶位置时的查表模块供整车行驶控制时使用。这里的全局最优控 制策略是查表函数,该表的横坐标是整车当前所处位置,纵坐标为下一时刻 动力电池及各驱动电机的最优工作状态参数。本发明中全局最优控制策略以 全程能耗最低为目标寻优获取。
31.目前可供采用的先进的控制策略主要有模型预测控制、模糊控制、神经 网络控制、滑模变结构控制等,这些控制策略都能够减少车辆行进过程中的 能耗,降低其运行成本,增加产品的市场竞争力。然而由于车辆行驶工况的 复杂多样,上述的控制策略对提升汽车运行的实用性作用有限。若想最大限 度地发挥车辆的节能潜力,全局最优控制是目前最佳的控制方法,然而由于 全局最优控制需要事先明确车辆所有行驶路线的工况参数,这对普通车辆来 说几乎是不可能实现的。
32.自行式电驱动混铁水车用于钢厂内铁水的运输,可以通过安装于轨道沿 线及车载的定位传感器和控制器,自行式电驱动混铁水车可以精准定位当前 所处位置并根据前方路况对自身运行参数进行调整。由于自行式电驱动混铁 水车的运输有详细的生产计划,其行驶轨迹可事先确定。这为全局最优控制 策略的应用提供了先决条件。
33.本发明还还公开了一种自行式电驱动混铁水车的智能控制方法,基于上 述自行式电驱动混铁水车的智能控制系统实现,如图2所示,主要包括以下 步骤:
34.s1、通过位置传感器检测车辆实时位置;通过运动传感器检测车辆实时 运行状态。具体来说,依靠整车位置传感器测定车辆当前处于固定轨迹中的 精确位置,依靠运动传感器检测整车当前运行状态(方向、车速、加速度等)。
35.s2、根据获取的车辆实时位置和车辆实时运行状态查询控制列表,从而 获取相应的控制参数。具体来说,整车的控制系统接受来自s1中测得的整车 精确位置和整车运行状
态,并查表获得此时铁水运输所要使用的控制策略。 此处的查表为选定此次行程中所要使用的控制策略,该控制策略是前述离线 仿真确定的。此处所查列表的行为整车精确位置,列为整车当前运行状态, 根据行和列确定下一时刻混铁车动力电池、驱动电机所需要的最佳控制变量 参数。
36.s3、根据所述控制参数控制动力电池和驱动电机运行。具体来说,通过 运动控制单元使混铁车实际运行状态与查表所得的控制参数保持一致。
37.本实施例提供的系统应用于宝钢335t自行式混铁车项目。该控制方法应 用于自行式电驱动混铁水车上,将最大程度的降低自行式电驱动混铁水车的 能耗,提高混铁车周转率,提高自行式电驱动混铁水车的经济性,减少所开 发的自行式电驱动混铁水车的全生命周期成本,同时该控制方法控制的可靠 性高。综上,该控制方法的使用将显著增强产品的市场竞争力与经济效益。
38.最后应说明的是:以上各实施例仅用以说明本发明的技术方案,而非对 其限制;尽管参照前述各实施例对本发明进行了详细的说明,本领域的普通 技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改, 或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并 不使相应技术方案的本质脱离本发明各实施例技术方案的范围。