1.本发明涉及高速铁路技术,特别是一种机车无线重联远程分布动力牵引运行控制 系统、重联机车。
背景技术:
2.高速与重载是铁路发展的两大主要方向,随着高速铁路技术的发展,重载铁路技术 及装备也得到了越来越高的重视。现有技术缺乏对不同型号的hxd1和hxd2重载电 力机车的适配,针对安装有不同类型tcms系统和安装不同类型的同步操纵重联控制设 备机车的应用适应性不足,不能很好满足重载组合情况下的机车无线重联远程分布动力 牵引运行功能的实现及应用。
技术实现要素:
3.本发明所要解决的技术问题是,针对现有技术不足,提供一种机车无线重联远程 分布动力牵引运行控制系统、重联机车,在实现重载组合列车多台机车无线重联远程分 布动力牵引运行控制的基础上,满足列车纵向力性能的优化。
4.为解决上述技术问题,本发明所采用的技术方案是:一种机车无线重联远程分布 动力牵引运行控制系统,包括设置于每台机车上的至少一个差异化重联控制单元;多台 机车上的差异化重联控制单元形成两级构架,第一级为云端差异化机车无线重联管理级, 各台机车的差异化重联控制单元通过无线通信、有线通信构成虚拟差异化无线重联管理 系统,当各台机车完成编组后,差异化重联控制单元完成初始化,建立差异化重联控制 单元的拓扑表,此时主控机车的差异化重联控制单元具有管理权,根据所述拓扑表管理 各差异化重联控制单元;第二级为差异化机车无线重联控制级,各台机车的无线重联控 制单元通过总线数据共享方式获取机车的控制信息、机车的状态反馈信息、运行线路数 据信息、无线通信信息,主控机车的差异化重联控制单元对机车的控制信息、机车的状 态反馈信息、运行线路数据信息、无线通信信息进行计算及处理,这个计算处理过程主 要分布在各台机车上进行,主从机车分别根据自身机车的牵引特性和总线拓扑进行适配。 在该级上核心模块dmu计算及协同控制通过机车差异化控制模块进行机车的静态逻辑 及动态时序逻辑的协同控制,将静态逻辑和动态时序逻辑融合一起,利用状态机作为触 发工作条件进行逻辑控制的转移。另外,设定的机车牵引特性曲线再通过牵引/制动特性 控制模块实时进行机车牵引特性的二次分配及调整,根据司机的设定的速度或者牵引/ 制动力的大小进行系数修正,降低列车的纵向作用力,简化控制逻辑,通过故障安全导 模块进行主动防护,最后通过dmu计算及协同控制模块进行各车的控制修正及协同控 制,并与各从控机车的差异化重联控制单元交换信息,同时,各机车的差异化重联控制 单元通过机车控制系统tcms以及电气接口,控制机车的牵引/制动力的调整。
5.本发明在原有重载机车上增加差异化重联控制单元dmu,并使之融入到机车的列 车控制与管理系统中,从而可以快速升级改造装有不同系统的重载电力机车,并有效稳 定
地建立多台机车远程重联,实现重载组合列车远程分布动力牵引运行,降低升级及维 护成本,而且能优化列车的纵向动力学性能。
6.所述差异化机车无线重联控制级与重联机车的机车控制系统tcms通信;所述机 车控制系统tcms通过接收差异化机车无线重联控制级的指令完成机车电气系统输入/ 输出及执行控制。本发明可以对不同机车上不同电气等级的电气信号进行采集和驱动, 不需要额外增加适配转换电路及设备,区别于一般机车分布式输入/输出接口,差异化机 车无线重联控制级采用集中输入/输出接口,采集和驱动均在同一设备执行。针对机车差 异化电气系统,在控制逻辑上进行归一化处理,从而降低系统设计的复杂度,进一步提 高了采集和驱动的可靠性。
7.所述差异化机车无线重联控制级通过车辆有线通信网络与机车控制系统tcms进 行信息交互。差异化机车无线重联控制级可适配多类型机车上的不同tcms总线,现有 tcms有线通信网络类型多样,通信协议复杂且差异大,差异化机车无线重联控制级通 过集成多种车辆通信接口,自动提取有效关键数据,达到快速适配tcms车辆总线的目 的,不需要额外增加外部通信网关。差异化机车无线重联控制级与tcms的信息交互是 双向同步的,并相互监测运行状态,满足数据实时性要求的同时也保证了数据的安全。
8.所述云端差异化机车无线重联管理级包括:
9.dmu云组网及管理模块,用于实现多台机车之间空中数据的实时交互及周期性交 互;
10.差异化适配云管理模块,用于形成多台机车之间控制应用的群组拓扑表,同时基 于通信平台的数据应用,针对机车的差异化,在云端将控制及反馈信息转义成统一的信 息方式,核对各机车的牵引特性是否符合重载列车牵引要求,以及核对各机车在列车中 的分布是否合理满足列车动力学性能要求,并根据机车的差异化进行牵引/制动特性权重 匹配;
11.无线链路管理模块,用于构建远程多台机车之间的实时通信,形成多台机车之间 群组控制应用的通信链路管理,进行数据的差错校验,同时进行链路管理主权的转换与 控制;
12.安全传输管理模块,通过对机车通信协议的优化,在原链路层安全效验的基础上, 在软件应用层对原透明传输方式增加了安全协议,使得每一帧编码过程中进行加密,即 使在传输的过程中数据被监测到,也不会对数据安全造成影响,实现数据的安全传输。
13.云端差异化机车无线重联管理级采用的是云计算服务器构架基础,将无线重联机 车控制计算统一归于云处理计算平台上,可充分发挥云端服务器的计算能力,降低机车 自身控制系统对算力的要求,减少机车设备安装,提高车载控制安全等级。机车无线重 联设备完成对机车的差异化数据归同,再由云端差异化机车无线重联管理完成统一协同 运算,使运算节拍保持一致,交互数据能同时得到处理和传输,提高机车指令响应速度, 消除计算延迟带来的安全性影响。
14.所述差异化机车无线重联控制级包括:
15.dmu计算及协同控制模块,用于实现本机车远程重联下的异步协同牵引运行控制;
16.无线通信数据传输模块,用于完成与无线链路管理模块的数据交互,并与冗余管 理模块通信;
17.冗余管理模块,冗余管理模块,用于一台机车内两个dmu单元的主权管理,获得 主控权的dmu单元具有对外输出功能,另一个将自动转为冗余模块,但不具备对外输 出功能,除此之外,与主控权dmu一样具有信息输入及计算处理功能。同时,冗余模 块具有监测主控dmu单元功能。一旦主控dmu异常将自动丧失主控权令牌,冗余dmu 单元中其冗余管理模块的状态自动获取令牌,升为主控模块;
18.机车差异化控制模块,用于实现不同类型机车及不同控制模式的机车控制,并与 dmu计算及协同控制模块、电气驱动控制模块通信;
19.牵引/制动特性控制模块,主控机车以及从控机车因车型不同存在差异性,其牵引/ 制动控制特性也随之存在差异性,同时各车在线路运行工况不同,特别是长大起伏坡道 和通过电分相,分布在列车中不同位置机车的牵引/制动特性需要调整。对此,在本发明 中牵引/制动特性控制模块根据不同车型、不同列车中分布位置、不同线路情况以及机车 运行工况,根据机车的差异化进行牵引/制动特性权重匹配系数,由主控机车司机控制器 的指令来调整各车的牵引/制动特性,实时计算及控制机车的牵引/制动特性,以降低列 车纵向作用力,优化列车运行品质;
20.故障安全导向控制模块,用于实现机车重联的故障诊断及安全导向,并与dmu计 算及协同控制模块、电气驱动控制模块通信;
21.电气驱动控制模块,用于实现机车控制系统tcms、bcu制动控制单元、lcu逻 辑控制单元的信号驱动,并与冗余管理模块通信;
22.通信接口模块,用于实现与tcms系统、bcu制动控制单元、lcu逻辑控制单元、 lkj列车运行安全监控装置、第三方设备的通信,并与dmu计算及协同控制模块、电 气驱动控制模块通信。
23.差异化机车无线重联控制级其控制目标为机车本身牵引、制动及安全导向,可快 速有效稳定地建立机车之间的互联,实现包括不同车型机车间的互联及重联,为上一级 的云端差异化机车无线重联管理建立了高效实时的控制基础。通过平台化的dmu控制单 元,集成多种通信接口和电气采集驱动电路,无需额外增加适配设备,即可兼容多类型 差异化机车无线重联编组,通过动力学性能优化控制多台差异化机车无线重联牵引运行, 采用冗余机制保证了系统的可靠性。
24.本发明还提供了一种重联机车,其采用上述机车无线重联远程分布动力牵引运行 控制系统。
25.本发明中,每台机车包括两节车,每节车上均设置有一个差异化重联控制单元; 或者,每台机车包括三节车,其中两个司机室的单元节上设置有所述差异化重联控制单 元;同一台机车的两个差异化重联控制单元相互通信。
26.与现有技术相比,本发明所具有的有益效果为:本发明通过在原有重载机车上增加 一套精简型差异化重联控制单元dmu,并使之融入到机车的列车控制与管理系统中, 快速升级改造装有不同国家系统的重载电力机车,并有效稳定地建立多台机车远程重联, 实现重载组合列车远程分布动力牵引运行,降低升级及维护成本,而且能优化列车的纵 向动力学性能。
附图说明
27.图1为本发明牵引运行控制系统结构示意图;
28.图2为本发明实施例1结构框图;
29.图3为本发明实施例2结构框图;
30.图4为本发明实施例3结构框图;
31.图5为本发明实施例4结构框图。
具体实施方式
32.本发明针对hxd1及hxd2重载电力机车不同系统进行快速化升级改造并兼容各自系 统,提供一种机车无线重联远程分布动力牵引运行控制系统,在实现重载组合列车多台 机车无线重联远程分布动力牵引运行控制的基础上满足列车纵向力性能的优化,以及更 广泛未来重载货运智能列车的发展。本发明建立基于列车控制与管理系统tcms及差异 化重联控制单元dmu融合的一体化列车控制与远程重联系统,dmu仅构建局域云平 台进行远程分布动力重联的控制,输入输出及执行驱动通过tcms来完成,以最小化的 dmu单元融入tcms系统中满足应用要求。
33.本发明参考专利zl201510388004.6及zl201811505275.5,同时,在其基础上形成 各远程机车的协同逻辑融合控制,根据zl201510388004.6实施方式及zl201811505275.5 实施方式形成状态机逻辑触发转移及牵引/特性权重系数匹配。本发明通过在原有重载机 车上通过增加一套精简型差异化重联控制单元dmu,构建基于列车控制与管理系统 tcms及差异化重联控制单元dmu融合的一体化列车控制与远程重联系统,快速升级 改造装有不同系统的重载电力机车,并有效稳定地建立多台机车远程重联,实现重载组 合列车远程分布动力牵引运行,降低升级及维护成本,优化列车的纵向动力学性能,具 体包括以下步骤:
34.(1)构建一种机车无线重联远程分布动力牵引运行控制系统,分为两部分,第1 部分为现代机车网络控制与管理系统tcms,即第ⅰ级,第2部分为差异化精简型重联 控制单元dmu,即第ⅱ级;第1部分与第2部分通过车辆通信网进行信息交互。第2 部分通过系统输入/输出采集及驱动与机车的电气控制系统连接。
35.(2)构建一种机车无线重联远程分布动力牵引运行控制系统,所述精简型dmu 部分内部分为12个模块,即dmu云组网及管理模块、差异化适配云管理模块、无线 链路管理模块、安全传输管理模块、dmu计算及协同控制模块、无线通信数据传输模 块、冗余管理模块、机车差异化控制模块、牵引/制动特性控制模块、故障安全导向控制 模块、电气驱动控制模块、通信接口模块。dmu无线链路管理模块进行多台机车通信 的链接管理及实时数据传输,建立局域云管理平台,通过dmu云组网及管理模块实现 多台机车之间空中数据的实时及周期性交互,安全传输管理模块保证数据传输的安全性。 差异化适配云管理模块根据列车所处位置及牵引功率进行权重系统的匹配,同时根据线 路坡道数据进行修正。无线通信数据传输模块完成与无线链路管理模块的数据交互,牵 引/制动特性控制模块根据所属主控机车以及从控机车工况来进行机车特性控制策略及 选择特性控制模式,实时计算及控制机车的牵引运行,机车差异化控制模块实现不同类 型机车及不同控制模式的机车控制,故障安全导向控制模块保障机车重联的故障诊断及 安全导向,电气驱动控制模块实现于tcms系统、bcu制动控制单元、lcu逻辑控制 单元的信号驱动,dmu计算及协同控制模块实现本机
车远程重联下的异步协同牵引运 行控制,通信接口模块实现与tcms系统、bcu制动控制单元、lcu逻辑控制单元、 lkj列车运行安全监控装置、第三方设备的通信,同时通信接口模块实现主控dmu与 冗余dmu互联通信,主控dmu与冗余dmu互联通信实现同一台机车内两套dmu 的信息交互及状态监控。
36.(3)构建的一种机车无线重联远程分布动力牵引运行控制系统,dmu按机车所属 主控机车以及从控机车工况来进行,dmu牵引/制动特性控制模块根据机车特性控制策 略及特性控制模式,并接受差异化适配云管理模块传输的牵引/制动特性权重匹配系数, 实时计算及控制差异化机车的特性控制,并通过其车辆有线通信网络模块与tcms进行 信息的交互。
37.(4)构建的一种机车无线重联远程分布动力牵引运行控制系统,所述第1部分 tcms在单机牵引列车时仍维持原有的牵引控制与管理功能,当进行机车重联时,tcms 中的根据dmu的重联协同控制进行重联模式的切换控制,tcms中的车辆通信模块与 dmu的通信模块进行信息的交互,tcms的执行机车重联的牵引协同运行控制,并通 过tcms的电气接口模块对机车的电气系统信号驱动合采集。
38.(5)构建的一种机车无线重联远程分布动力牵引运行控制系统,重联机车的dmu 单元每节车设置一台,每台机车的两个dmu单元互为冗余。在逻辑构建上,系统采用 两级构架,一级为云端差异化机车无线重联管理级,各重联机车dmu的多机组网及链 路管理模块通过远程无线通信模块来构建,并与tcms系统接口的车辆通信模块构成虚 拟差异化重联控制系统,当各重联机车完成编组后,各dmu单元进行初始化,完成差 异化重联控制单元的拓扑表的建立,此时主控机车的dmu具有管理权,管理各dmu 单元。第二级为机车无线重联异步协同控制级,构建的各机车差异化无线重联控制单元 dmu通过车辆通信模块以总线数据共享方式获取机车的控制信息、机车的状态反馈信 息,通过dmu的lkj通信模块获取lkj系统运行线路数据信息,最后主dmu的差异 化特性调节模块计算及处理以及与各从dmu交换信息。同时,各dmu通过其通信模 块与tcms系统信息交互,控制机车的牵引/制动力的调整。
39.机车无线重联远程分布动力牵引运行控制系统可以形成1台主控机车远程控制1台 以上从控机车进行列车分布动力的牵引运行异步协同控制。
40.实施例1
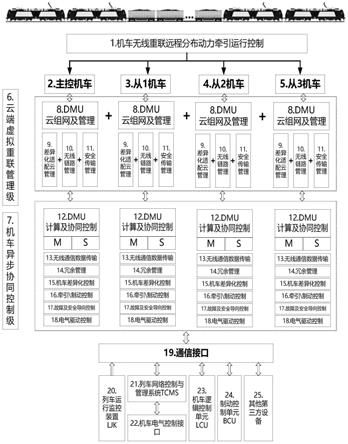
41.如图1及图5所示,本发明实施例1包括系统可形成包括2主控机车、3从1机车、 4从2机车、5从3机车等四台数量机车无线重联,构建出1机车无线重联远程分布动 力牵引运行控制系统。系统分为两部分,第一部分构建6云端虚拟重联管理级,第二部 分构建7机车异步协同控制级,这两级通过dmu来完成。每台机车dmu的第一级包 括8dmu云组网及管理模块、9差异化云适配管理模块、10无线链路管理模块、11安 全传输管理模块。每台机车dmu的第二级包括12dmu计算及协同控制模块、13无线 通信传输模块、14冗余管理模块、15机车差异化控制模块、16牵引/制动特性控制模块、 17故障及安全导向控制模块、18电气驱动控制模块。dmu通过19通信接口模块与机 车系统进行信息交互,包括通过19通信接口模块与20列车安全监控装置lkj获取线路 信息及列车参数,通过19通信接口模块与列车网络控制与管理系统tcms进行信息交 互,通过19通信接口模块与23机车逻辑控制单元lcu进行信息交互,通过19通信接 口模块与24制动控制单元bcu进行信息交互,通过19通信接口模块与25
第三方设备 进行信号交互。
42.作为第1级云端虚拟重联管理级(即第ⅰ级),由每台机车主控dmu的8、9、10、 11模块构成,由主车的dmu作为管理者,其特征为多机的远程重联由云端进行差异化 管理与控制,实现四台机车的组网、编组及内部信息实时交互平台,并受主车控制,同 时解决了从车的触发实时响应问题。作为第2级机车异步协同控制级(即第ⅱ级),由 每台机车主控dmu的12、13、14、15、16、17、18模块构成,其特征为实现机车的 本地进行异步控制,完成多台机车重联的协同控制牵引运行,同时也能容易的优化列车 运行时的纵向动力学性能。
43.如图1及图5所示,一种机车无线重联远程分布动力牵引运行控制方法及系统,dmu通过19通信接口模块同原机车的21列车网络控制与管理系统tcms、20列车安全运行监控装置lkj、23机车逻辑控制单元lcu、24制动控制单元bcu、25第三方设备进行信息的交互,获取机车的状态信息并通过上述设备执行本机车的控制。
44.实施例2
45.如图2所示,作为第1级云端虚拟重联管理级(即第ⅰ级),通过dmu构建了四 台机车的远程重联组网及实时信息链路交互,形成了多机的远程重联由云端进行差异化 管理与控制,实现四台机车的组网、编组及内部信息实时交互平台,并受主车控制,同 时解决了从车的触发实时响应问题。作为第2级机车异步协同控制级(即第ⅱ级),由 每台机车主控dmu为现机车的本地进行异步控制,完成组合列车各重联机车的协同控 制牵引运行。通过本发明还可扩展成两台、三台或超过四台机车远程无线重联的牵引运 行控制。
46.实施例3
47.如图3所示,本发明实施例3包括系统在重载机车上实施时的两节内重联机车的系 统拓扑连接关系,两节车的dmu通过26交换机模块(cs)进行互联信息交换,上电 初始时两个dmu都为弱节点,默认与主控机车同向运行端为主dmu,据此dmu冗余 控制模块确定其中一个dmu获得控制令牌升为控dmu,并进行控制,另一dmu降为 冗余dmu进行状态监控。如主控dmu故障,其令牌丢失,冗余dmu自动升为主控 dmu。其中包括27微机显示单元模块(idu)、28制动单元显示模块(lcd)、29信号 合路器模块。
48.实施例4
49.如图4所示为本发明实施例4机车无线重联远程分布动力牵引运行控制系统,其dmu 内部模块之间的连接关系。图4中dmu分类逻辑的两部分,一部分包括模块8、9、10、 11,用来实现差异化虚拟重联管理,另一部分包括模块12、13、14、15、16、17、18、 19,用来实现本车的异步协同牵引运行控制。每台机车设置两套dmu,一套为主控, 另一套为冗余,主控状态标记为m,冗余状态标记为s,两套系统通过通信进行互联。