1.本实用新型涉及一种用于水下检测并清理管道吸附物的技术,特别涉及一种水下检测并清理管道吸附物装置。
背景技术:
2.随着科技的进步,我国的海洋石油资源量约246亿吨占石油资源总量的22.9%;海洋天然气资源量为15.79万亿立方米,占天然气资源总量的29.0%;海洋石油在国内石油产量的增量中占有越来越重要的地位。且前我国海域已铺设的海底管道超过3000km,海底油管道是投资高风险大的海洋工程俊施,它对海上油气的开发,生产与产品外确起着至关重要的作用。但随着时间的推移水下管道上的浮游生物附着上面,缩短管道的寿命,给我国带来巨大的损失。现有技术对管道进行维护费用过大,并且难以实现。
技术实现要素:
3.本实用新型的目的在于提供一种水下智能巡检装置,本装置这种结构简单材料价格低。
4.为达到上述目的,本实用新型的实施例采用如下技术方案:
5.根据本实用新型提供的一个实施例,本实用新型提供了一种
6.一种水下智能巡检装置,包括机体、控制系统和识别系统;所述机体上设有四个旋桨臂连接的螺旋桨,螺旋桨由电机连接旋转,对角布置螺旋桨转速与相邻布置的螺旋桨转速相反;所述控制系统和识别系统设在机体内,控制系统分别连接电机和识别系统。
7.作为优选,四个旋桨臂分别连接有电机套筒,电机置于所述电机套筒内,电机套筒上加盖有电机盖。
8.作为优选,所述电机套筒的底端有固定电机的固定环和放置电机接线头的底槽。
9.作为优选,所述识别系统包括两个不同颜色的led灯,led灯位于机体上端的顶盖上。
10.作为优选,所述旋桨臂的顶端设有凸起,电机套筒侧面的短管内壁上设有与所述凸起扣合的凹槽。
11.作为优选,所述控制系统包括设在机体内相互连接的摄像头、电池和开发板,开发板芯片采用stm单片机。
12.相对于现有技术,本实用新型的有益效果在于:
13.整个过程实现全过程的自主控制,自动识别,自动规划路线,自动潜水和上升。本装置具有结构简单,易于维护,投资小,安装方便的特点;而且零件可以被替换,套筒可以更换且可以根据电机的尺寸更改套筒的尺寸。
附图说明
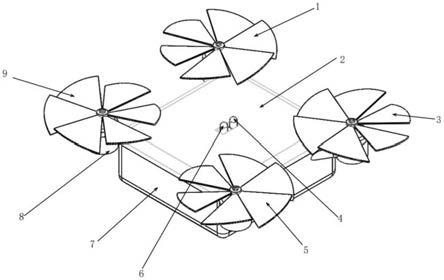
14.图1是水下智能巡检装置整体示意图;
15.图2是螺旋桨装置示意图;
16.图3是机体内部示意图。
17.图中:1、第一螺旋桨;2、顶盖;3、第二螺旋桨;4、红色led灯;5、第三螺旋桨;6、绿色led灯;7、机体;8、电机套筒;9、第四螺旋桨;10、电机盖;11、开发板;12、固定环;13、底槽;14、电机;15、摄像头;16、电池;17、旋翼臂。
具体实施方式
18.下面结合附图和具体实施方式对本实用新型进行详细说明。
19.如图1所示,本实施例提供一种水下智能巡检装置,包括机体7、控制系统11和识别系统15,机体为矩形框结构,在矩形框架的两侧面上连接有四个旋翼臂17,各旋翼臂17上连接有电机套筒18,每个电机套筒8装有一个电机14和一个螺旋桨,电机8的上方有与电机套筒8相连的电机盖10。机体的上端装有顶盖2,顶盖的中心位置装有两个led灯,分别是红色led灯4和绿色led灯6,用来显示检测的结果。
20.旋桨臂17的顶端设有凸起,电机套筒8侧面的短管内壁上设有凹槽,二者用来固定连接,以防连接后发生转动,影响本装置的正常使用。
21.四个螺旋桨分别按照顺时针方向安装为第一螺旋桨1、第二螺旋桨3、第三螺旋桨5和第四螺旋桨9,第一螺旋桨1和第三螺旋桨5为逆向螺旋桨,与之所连接的电机转动方向为顺时针;第二螺旋桨3和第四螺旋桨9为正向螺旋桨,与之连接的电机转动方向为逆时针。
22.电机套筒8的底端有固定环12和底槽13。电机的底端由固定环12固定,低槽13用来放置电机的接线头。旋桨臂17中间是空心的管道,管道内穿过电线连接电机的接线头。
23.控制系统11包括设在机体内部的摄像头15、电池16和开发板11,使用stm单片机作为开发板芯片,配合摄像头15采集的图像进行分析,从而来识别障碍物的位置,并识别该装置的行迹路线。
24.本实用新型的工作原理:
25.如图1、图2、图3所示,巡检装置由摄像头识别管道的位置,从而规划装置的运动路线;开发板控制每个螺旋桨的运动状态,从而实现装置的运动状态和运动方向。当四个螺旋桨1、3、5和9的电机转速增大或减少时,可以完成巡检装置的垂直方向运动;如果将第一螺旋桨1和第四9螺旋桨的电机转速增大或将第二螺旋桨3和第三螺旋桨5的电机转速减少时,巡检装置就会向后运动;如果将第一螺旋桨1和第四9的电机转速减少,或将第二螺旋桨3和第三螺旋桨5的电机转速增大时,巡检装置就会向前运动;如果将第一螺旋桨1和第二螺旋桨3的电机转速减少,或将第四螺旋桨9和第三螺旋桨5的电机转速增大时,巡检装置就会向右运动;如果将第一螺旋桨1和第三螺旋桨3的电机转速增大,或将第四螺旋桨9和第三螺旋桨5的电机转速减少时,巡检装置就会向左运动。巡检装置沿管道向前运动的过程中,如果摄像头检测到了障碍物,会将信息传到stm单片机开发板,开发板开始分析,分析完后,开发板控制指定led灯开始亮起并报警,不同的障碍物会亮起不同颜色的灯,为了人们更好的区分障碍物的形状。
26.本实用新型并不局限于上述实施例,在本实用新型公开的技术方案的基础上,本领域的技术人员根据所公开的技术内容,不需要创造性的劳动就可以对其中的一些技术特征作出一些替换和变形,这些替换和变形均在本实用新型的保护范围内。
技术特征:
1.一种水下智能巡检装置,其特征在于,包括机体、控制系统和识别系统;所述机体上设有四个旋桨臂连接的螺旋桨,螺旋桨由电机连接旋转,对角布置螺旋桨转速与相邻布置的螺旋桨转速相反;所述控制系统和识别系统设在机体内,控制系统分别连接电机和识别系统。2.根据权利要求1所述的一种水下智能巡检装置,其特征在于,四个旋桨臂分别连接有电机套筒,电机置于所述电机套筒内,电机套筒上加盖有电机盖。3.根据权利要求2所述的一种水下智能巡检装置,其特征在于,所述电机套筒的底端有固定电机的固定环和放置电机接线头的底槽。4.根据权利要求1所述的一种水下智能巡检装置,其特征在于,所述识别系统包括两个不同颜色的led灯,led灯位于机体上端的顶盖上。5.根据权利要求1所述的一种水下智能巡检装置,其特征在于,所述旋桨臂的顶端设有凸起,电机套筒侧面的短管内壁上设有与所述凸起扣合的凹槽。6.根据权利要求1所述的一种水下智能巡检装置,其特征在于,所述控制系统包括设在机体内相互连接的摄像头、电池和开发板,开发板芯片采用stm单片机。
技术总结
本实用新型公开了一种水下智能巡检装置,包括机体、控制系统和识别系统;机体上设有四个旋桨臂连接的螺旋桨,螺旋桨由电机连接旋转,对角布置螺旋桨转速与相邻布置的螺旋桨转速相反;控制系统和识别系统设在机体内,控制系统分别连接电机和识别系统。选用四旋桨结构保证装置在水下运动时机机体的稳定性,摄像头可以识别管道的位置从而规划行进的路线,开发板控制相应颜色的LED灯亮起并开始报警。整个巡检过程可以做到自主运动、路径规划、障碍物识别,识别后报警、根据不同的障碍物显示相应的LED灯,实现水下智能巡检。实现水下智能巡检。实现水下智能巡检。
技术研发人员:焦艳梅 徐中迅 马兴成 王皓哲 李忠浩 刘凌
受保护的技术使用者:西安文理学院
技术研发日:2021.04.12
技术公布日:2022/1/14