1.本发明属于物理海洋导航定位领域,具体涉及一种水上水下一体化无人系统、方法。
背景技术:
2.可靠的水上水下位置信息服务是发展海洋科考、海洋经济、海洋科学的基础保障。同时,随着人民海军高速高质量建设,我国海军从近海走向深海。高精度、高可靠性的时间、位置、速度和姿态信息是海洋监测基础性平台最为重要的基准保障和可行性支持,其重要性不言而喻。对于现在大部分科考船的物理海洋探测工作都是基于深海拖曳系统工作,深拖系统需要一个几千米的光电复合缆,科考船慢速机动拖曳,且水下深拖系统定位服务,仅仅基于usbl信号为其提供。对于现如今的深拖系统,此类设计通常存在几个问题:(1)需要一个几千米的光电复合缆,成本较高,且需要科考船时刻拖曳运行,避免深拖沉底,释放、回收工作复杂;(2)基于目前深拖系统,仅仅处于usbl定位模式,无法提供高精度的位置信息,不能为水下物理勘察设备提供高精度、高可靠性的基准信息。在深远海等复杂工况下,组合导航技术将各类水上水下传感器进行信息融合,获得高精度、高频、高可靠性的水上水下一体化的导航定位、授时服务。
技术实现要素:
3.本发明提出一种水上水下一体化无人系统、方法,以克服现有技术中光电复合缆拖拽成本高、深拖系统定位精度不高的问题。
4.本发明具体采用如下技术方案:
5.一种水上水下一体化无人系统,包括无人船编队、科考船和搭载深拖系统的水下auv,水上水下一体化无人系统以科考船为主控基站平台,无人船编队为从属站点;
6.科考船和无人船安装usbl,所述usbl可充当lbl使用,usbl结合水下auv安装的dvl和ins设备形成水下混合基线+dvl+ins定位、测速和测姿系统;所述水下auv包括:gnss接收机、imu、usbl设备、dvl、深拖系统和通讯设备。
7.优选地,所述科考船设有用于控制水上无人船编队移动、回收、信息发布、数据采集存储和显控的主控系统,无人船编队基于多传感器高精度定位结果为水下auv提供高精度位置基准;水下auv基于混合基线实现高精度定位结果,并搭载深拖系统实现水下地形环境监测任务,基于水声通讯设备将实测数据传输到科考船。
8.优选地,usbl装置安装于无人船船底,换能器发射特定频率的声信号并接受来自应答器返回的信号,基于usbl为水下auv提供高精度的位置信息,通过auv自身高精度晶振确定时间信息。
9.一种水上水下一体化无人系统的使用方法,使用所述的水上水下一体化无人系统,包括:
10.s1.基于多天线gnss/ins组合模式实现科考船与无人船编队的高精度定位、测速
和测姿;
11.s2.科考船控制无人船编队航行任务,满足最优构型;
12.s3.将传统深拖系统上的传感器搭载到水下auv设备上,科考船通过控制水上水下一体化无人编队系统实现对水下海洋环境的勘测。
13.优选地,步骤s1包括:s1.1.gnss多频多系统接收机通过基于实时的精密改正信息,得到主天线的高精度实时绝对位置;
14.s1.2.获取三天线观测信息,通过实时动态基线解算,得到载体的姿态信息;
15.s1.3.主天线输出秒脉冲信号,基于1pps的信号,实现了gnss/imu/dvl的时间同步;
16.s1.4.将基于多天线gnss解算的位置、速度和姿态信息与imu/dvl实现数据融合,构建位置、速度和姿态全组合模式,得到高精度载体信息。
17.优选地,步骤s2包括:s2.1.科考船通过主控台的控制系统控制无人船的航行速度和方向;
18.s2.2.以gdop判定海面无人船编队的构型:gdop=sqrt(9/n);其中,n为海面无人船的个数,当无人船的构型满足最优构型时,通过lbl/usbl的非差分/差分算法进行定位;
19.s2.3.当无人船编队位置在风浪作用下发生变化,不满足最优构型,科考船主控制器通过无线通讯设备发送无人船偏移的相对位置,无人船的无线通讯获取科考船的信息,无人船控制器控制船体。
20.优选地,步骤s3包括:s3.1.将传统深拖系统上的传感器搭载到水下auv设备上,用于对海洋水底地形大的勘探调查;
21.s3.2.科考船通过无线通讯技术发送控制指令,控制无人船编队到达指定测区;
22.s3.3.水下auv根据科考船设定的水深指令实现对auv导航控制,到达指定区域与无人船实现同速前进;
23.s3.4.水下auv通过搭载的多传感器实现对海洋水底地形的勘测,将测得的数据以声信号传输至科考船并进行auv的实时本地存储。
24.推进设备,使得无人船船恢复到最优构型时的相对位置。
25.与现有技术相比,本发明有效解决深拖系统及其它水下载体的高精度定位、测速和测姿的难题,显著提高了深远海水下auv定位精度和工作效率。
附图说明
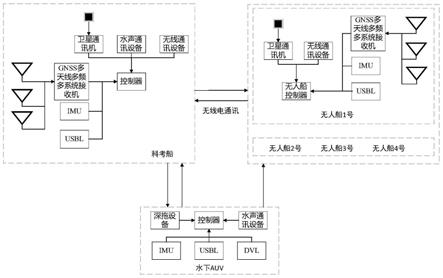
26.图1为一种水上水下一体化无人系统结构框图;
27.图2为一种水上水下一体化无人系统示意图。
具体实施方式
28.下面结合具体实施例对本发明的具体实施方式做进一步说明:
29.一种水上水下一体化无人系统,包括无人船编队、科考船和搭载深拖系统的水下auv,水上水下一体化无人系统以科考船为主控基站平台,无人船编队为从属站点;
30.科考船和无人船安装usbl,所述usbl可充当lbl使用,usbl结合水下auv安装的dvl和ins设备形成水下混合基线+dvl+ins定位、测速和测姿系统;所述水下auv包括:gnss接收
机、imu、usbl设备、dvl、深拖系统和通讯设备。
31.优选地,所述科考船设有用于控制水上无人船编队移动、回收、信息发布、数据采集存储和显控的主控系统,无人船编队基于多传感器高精度定位结果为水下auv提供高精度位置基准;水下auv基于混合基线实现高精度定位结果,并搭载深拖系统实现水下地形环境监测任务,基于水声通讯设备将实测数据传输到科考船。
32.优选地,usbl装置安装于无人船船底,换能器发射特定频率的声信号并接受来自应答器返回的信号,基于usbl为水下auv提供高精度的位置信息,通过auv自身高精度晶振确定时间信息。
33.一种水上水下一体化无人系统的使用方法,使用所述的水上水下一体化无人系统,包括:
34.s1.基于多天线gnss/ins组合模式实现科考船与无人船编队的高精度定位、测速和测姿;
35.s2.科考船控制无人船编队航行任务,满足最优构型;
36.s3.将传统深拖系统上的传感器搭载到水下auv设备上,科考船通过控制水上水下一体化无人编队系统实现对水下海洋环境的勘测。
37.优选地,步骤s1包括:s1.1.gnss多频多系统接收机通过基于实时的精密改正信息,得到主天线的高精度实时绝对位置;
38.s1.2.获取三天线观测信息,通过实时动态基线解算,得到载体的姿态信息;
39.s1.3.主天线输出秒脉冲信号,基于1pps的信号,实现了gnss/imu/dvl的时间同步;
40.s1.4.将基于多天线gnss解算的位置、速度和姿态信息与imu/dvl实现数据融合,构建位置、速度和姿态全组合模式,得到高精度载体信息。
41.优选地,步骤s2包括:s2.1.科考船通过主控台的控制系统控制无人船的航行速度和方向;
42.s2.2.以gdop判定海面无人船编队的构型:gdop=sqrt(9/n);其中,n为海面无人船的个数,当无人船的构型满足最优构型时,通过lbl/usbl的非差分/差分算法进行定位;
43.s2.3.当无人船编队位置在风浪作用下发生变化,不满足最优构型,科考船主控制器通过无线通讯设备发送无人船偏移的相对位置,无人船的无线通讯获取科考船的信息,无人船控制器控制船体。
44.优选地,步骤s3包括:s3.1.将传统深拖系统上的传感器搭载到水下auv设备上,用于对海洋水底地形大的勘探调查;
45.s3.2.科考船通过无线通讯技术发送控制指令,控制无人船编队到达指定测区;
46.s3.3.水下auv根据科考船设定的水深指令实现对auv导航控制,到达指定区域与无人船实现同速前进;
47.s3.4.水下auv通过搭载的多传感器实现对海洋水底地形的勘测,将测得的数据以声信号传输至科考船并进行auv的实时本地存储。
48.推进设备,使得无人船船恢复到最优构型时的相对位置。
49.科考船作为基站科考船,实现系统的整体控制,数据处理和水上水下载体实时监控;
50.无人船通过与科考船组成水上船体编队,为水下auv提供位置基准与导航控制;
51.gnss接收机用于获取科考船和无人船编队的地固坐标系坐标以及姿态信息;
52.imu给出科考船、无人船、auv的角速度和加速度信息,通过imu算法,根据一组起始的位置、速度和姿态信息,附加误差地连续推算之后任意时刻的位置、速度和姿态信息;
53.usbl传感器可以采用混合基线定位的方式实现对水下auv的高精度定位;
54.dvl基于多普勒测速的原理测量水下auv相对于海底速度;
55.深拖系统是挂载在auv设备上的深海地质、地球物理综合观测仪器系统,主要搭载了多波束、侧扫声呐、浅地层剖面仪等传感器;
56.通讯设备其中包括了卫星通讯机用于从卫星获取实时的精密改正信息、无线通讯用于实现数据信息传输、载体通讯和载体监控等。
57.当然,上述说明并非是对本发明的限制,本发明也并不仅限于上述举例,本技术领域的技术人员在本发明的实质范围内所做出的变化、改型、添加或替换,也应属于本发明的保护范围。