1.本实用新型涉及无人装备捕捉技术领域,具体涉及一种水面无人装备联动捕捉装置。
背景技术:
2.随着无人装备被广泛应用,海洋无人装备也取得长足发展,相较于成体系有规划的无人装备,其收放系统功能特性各异,通常随任务特性不同而变化。目前在无人装备回收方面主要采用:蛙人(或辅助小艇载操作人员)进行吊具链接和导向结构校正和遥控吊具链接两种方式。后一种方式中,“导向校正”机构起到修正无人装备航行速度:使其与母船航速相对固定;校正姿态,便于最终遥控锁紧机构成功挂接等作用。
3.在回收捕捉的适配性方面:有人(蛙人或辅助艇操作人员)挂钩设备,多使用普通吊机临时执行收放任务;无人挂钩一般使用定制过渡吊具。即行业对释放回收装置还未有顶层的、系统的规划布局,各装置间通用性不高。部分环境如坞舱并无适合的捕捉回收机构。
技术实现要素:
4.本实用新型的目的是为了解决以上现有技术的不足,提出了一种水面无人装备联动捕捉装置,包括阻拦模块、传动模块和夹持模块,所述的阻拦模块包括阻拦网、阻拦支撑框架和x轴移动机构,所述的阻拦网通过阻拦支撑框架安装于x轴移动机构上;所述的夹持模块包括对称设置的一组夹持支架和一组y轴侧移机构,所述的夹持支架均安装于y轴侧移机构上;
5.所述的传动模块包括缓冲油缸组、转角滑轮组、夹持油缸组和两根传导钢丝绳,所述的缓冲油缸组一端均通过缓冲油缸组的活塞杆与x轴移动机构相连接,所述的转角滑轮组设于缓冲油缸组的另一端处,所述的夹持油缸组呈对称状设于转角滑轮组的两侧,且夹持油缸组均通过夹持油缸组的活塞杆与y轴侧移机构相连接,所述的两根传导钢丝绳一端均与x轴移动机构相连接,另一端通过转角滑轮组与y轴侧移机构相连接。
6.进一步地,所述的夹持油缸组均与液压系统相连接。
7.更进一步地,所述的液压系统包括电机、油泵、电磁阀和蓄能器。
8.基于上述进一步的方案,在布放工况时,通过液压系统的电磁阀控制使夹持油缸组的活塞杆伸出从而张开加持支架,并通过传导钢丝绳的作用使x轴移动机构回到初始位置。
9.更进一步地,所述的x轴移动机构包括x轴导轨、x轴移动平台和x轴滚轮,所述的x轴滚轮安装于x轴移动平台的两侧,并设于x轴导轨内,x轴平台相对x轴导轨前后移动。
10.更进一步地,所述的y轴侧移机构包括y轴导轨、y轴滚轮和y轴移动平台,所述的y轴滚轮安装于y轴移动平台的两侧,并设于y轴导轨内,y轴平台相对y轴导轨前后移动。
11.更进一步地,所述的缓冲油缸组和夹持油缸组均通过油缸安装架安装于基面上,
所述的油缸安装架为可调安装架。
12.基于上述进一步的方案和模块化结构,可以使本实用新型便于调整适用于不同外形和体积的无人装备。
13.更进一步地,缓冲油缸组的有杆腔和无杆腔内均充有液压油并且通过可调节流阀联通。
14.更进一步地,所述传动模块的材质均为防腐蚀材料。
15.更进一步地,所述的x轴移动机构上安装有第一滑轮组,所述的传导钢丝绳均通过第一滑轮组与x轴移动机构相连接。
16.更进一步地,所述的y轴侧移机构上安装有第二滑轮组,所述的传导钢丝绳均通过第二滑轮组与y轴侧移机构相连接。
17.运行原理:当无人装备自水面或半潜状态航行至捕捉区域时,其艏部首先与阻拦网接触,无人装备前进的惯性力通过阻拦网传递至阻拦支撑框架,进而带动x轴移动机构整体向前滑动;
18.在阻拦模块的x轴移动机构产生运动时,传动模块的缓冲油缸组的活塞杆伸出,因为节流阀的阻尼作用,伸出速度会变慢,从而使无人装备的运行速度平缓地过渡至母船相同状态。同时,传导钢丝绳与第一滑轮组接触的一端被拉动,通过转角滑轮组的过渡,传导钢丝绳与第二滑轮组接触的一端被同步拉动,使y轴侧移机构产生与x轴移动机构相同步的运动,夹持支架在y轴侧移机构的运动下完成夹持动作,从而实现捕捉工况的缓冲与夹持动作的联锁,对无人装备在纵向与横向同时产生矫正和约束。
19.在布放工况时,通过液压系统的电磁阀控制使夹持油缸组的活塞杆伸出从而张开加持支架,并通过传导钢丝绳的作用使x轴移动机构回到初始位置。
20.有益效果:(1)本实用新型采用模块化的结构,具有可调性,可同时满足多种类、不同尺寸水面无人装备的布放与回收辅助。
21.(2)本实用新型采用防腐蚀材质传动模块,能够适应恶劣海况环境,尤其是机构浸没于水中的工况;
22.(3)本实用新型在捕捉工况时可以实现纵向与横向同时产生矫正和约束,消减在恶劣海况下,对无人装备回收过程中“相对速度”及“相对姿态”等方面的不利因素,确保捕捉任务的顺利完成;
23.(4)本实用新型结构简单,维护方便,可靠性强,适用范围广,适合在坞舱湿坞状态及舷侧笼式平台中搭载,用以辅助布放、回收水面无人装备。
附图说明
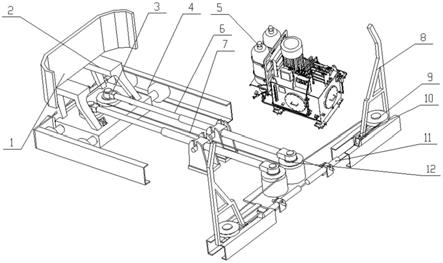
24.图1是一种水面无人装备联动捕捉装置的立体结构示意图;
25.图2是联动捕捉装置的运动示意图(图中双箭头为捕捉工况的运动路径,单箭头为布放工况的运动路径);
26.图中:1、阻拦网,2、阻拦支撑框架,3、第一移动滑轮组,4、x轴移动机构,5、液压系统,6、缓冲油缸组,7、传导钢丝绳,8、夹持支架,9、移动滑轮组,10、y轴侧移机构,11、夹持油缸组,12、转角滑轮组。
具体实施方式
27.为了加深对本实用新型的理解,下面将结合实施例和附图对本实用新型作进一步详述,该实施例仅用于解释本实用新型,并不构成对本实用新型保护范围的限定。
28.本实用新型中的“x轴移动机构”与“y轴侧移机构”仅为“x轴移动机构”与“y轴侧移机构”之间呈一定角度,并非必须是垂直的直角关系,实施例与附图中选择便于理解的呈直角关系的“x轴移动机构”与“y轴侧移机构”,并不构成对本实用新型中保护范围的限定。
29.如图1所示,一种水面无人装备联动捕捉装置,包括阻拦模块、传动模块和夹持模块,所述的阻拦模块包括阻拦网1、阻拦支撑框架2和x轴移动机构4,所述的阻拦网1通过阻拦支撑框架2安装于x轴移动机构4上;所述的夹持模块包括对称设置的一组夹持支架8和一组y轴侧移机构10,所述的夹持支架8均安装于y轴侧移机构10上;
30.所述的传动模块包括缓冲油缸组6、转角滑轮组12、夹持油缸组11和两根传导钢丝绳7,所述的缓冲油缸组6一端均通过缓冲油缸组的活塞杆与x轴移动机构4相连接,所述的转角滑轮组12设于缓冲油缸组6的另一端处,所述的夹持油缸组11呈对称状设于转角滑轮组12的两侧,且夹持油缸组11均通过夹持油缸组的活塞杆与y轴侧移机构10相连接,所述的两根传导钢丝绳7一端均与x轴移动机构4相连接,另一端通过转角滑轮组12与y轴侧移机构10相连接。
31.于本实施例中,所述的夹持油缸组11均与液压系统5相连接。所述的液压系统包括电机、油泵、电磁阀和蓄能器。
32.于本实施例中,所述的x轴移动机构包括x轴导轨、x轴移动平台和x轴滚轮,所述的x轴滚轮安装于x轴移动平台的两侧,并设于x轴导轨内,x轴平台相对x轴导轨前后移动;所述的y轴侧移机构包括y轴导轨、y轴滚轮和y轴移动平台,所述的y轴滚轮安装于y轴移动平台的两侧,并设于y轴导轨内,y轴平台相对y轴导轨前后移动。
33.于本实施例中,所述的缓冲油缸组6和夹持油缸组11均通过油缸安装架安装于基面上,所述的油缸安装架为可调安装架。
34.于本实施例中,缓冲油缸组6的有杆腔和无杆腔内均充有液压油并且通过可调节流阀联通。
35.于本实施例中,所述传动模块的材质均为防腐蚀材料。
36.于本实施例中,所述的x轴移动机构4上安装有第一滑轮组3,所述的传导钢丝绳7均通过第一滑轮组3与x轴移动机构4相连接;所述的y轴侧移机构10上安装有第二滑轮组9,所述的传导钢丝绳7均通过第二滑轮组9与y轴侧移机构10相连接。
37.如图2所示,当无人装备自水面或半潜状态航行至捕捉区域时,其艏部首先与阻拦网接触,无人装备前进的惯性力通过阻拦网传递至阻拦支撑框架,进而带动x轴移动机构整体向前滑动;
38.在阻拦模块的x轴移动机构产生运动时,传动模块的缓冲油缸组的活塞杆伸出,因为节流阀的阻尼作用,伸出速度会变慢,从而使无人装备的运行速度平缓地过渡至母船相同状态。同时,传导钢丝绳与第一滑轮组接触的一端被拉动,通过转角滑轮组的过渡,传导钢丝绳与第二滑轮组接触的一端被同步拉动,使y轴侧移机构产生与x轴移动机构相同步的运动,夹持支架在y轴侧移机构的运动下完成夹持动作,从而实现捕捉工况的缓冲与夹持动作的联锁,对无人装备在纵向与横向同时产生矫正和约束。
39.在布放工况时,通过液压系统的电磁阀控制使夹持油缸组的活塞杆伸出从而张开加持支架,并通过传导钢丝绳的作用使x轴移动机构回到初始位置。
40.以上所述仅为本实用新型的较佳实施例而已,并不用以限制本实用新型,凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。