1.本发明涉及无人养殖船技术领域,具体涉及一种无人养殖船螺旋桨推进装置的浸没深度自主调节方法。
背景技术:
2.船用螺旋桨是指靠桨叶在水中旋转,将螺旋桨转动功率转化为船舶推进力的装置。船舶在不同装载工况下其船体的吃水也不同,同时螺旋桨的浸没深度也会改变。随着船舶载重量的减少,螺旋桨浸没深度亦会减少,超过一定阈值时,螺旋桨桨叶将会裸露出水面,俗称螺旋桨“出水”。螺旋桨一旦“出水”,其推进效率将会下降。
3.目前船舶上使用的螺旋桨一般都是固定式安装,无法依据需要调整螺旋桨浸没深度。为了解决螺旋桨“出水”问题,船舶上通常会配备压载水系统来调整船舶吃水和浮态,进而调整螺旋桨浸没深度。
4.相关技术中的无人养殖船主要用于虾类养殖,能一次性装载50公斤饵料,可实现无人自动巡航和自动撒料,船体尺度和重量都很小,出于功能需求、结构布置、成本节约等方面的考虑,相关技术中的无人养殖船未设置压载水系统,在撒料过程中,船体载重会逐渐减小,而船体自身无法弥补饵料的减少重量,因此船体会上浮,现有的固定式螺旋桨,会导致螺旋桨裸露出水面,进而影响无人养殖船的推进效率。
技术实现要素:
5.根据现有技术的不足,本发明的目的是提供一种无人养殖船螺旋桨推进装置的浸没深度自主调节方法为解决此问题,以解决无人养殖船螺旋桨在撒料过程中,螺旋桨裸露出水面,进而影响无人养殖船推进效率的问题。
6.为了解决上述技术问题,本发明采用的技术方案为:
7.一种无人养殖船螺旋桨推进装置的浸没深度自主调节方法,包括:
8.步骤1、在无人养殖船上尾部设置螺旋桨推进装置,所述螺旋桨推进装置包括浸没杆、螺旋桨组件和升降驱动组件,所述螺旋桨组件与所述浸没杆的底部相连,所述升降驱动组件设在所述无人养殖船上,所述升降驱动组件的动力输出端与所述浸没杆相连,所述螺旋桨组件包括螺旋桨、转动电机和水深传感器,所述转动电机用于驱动所述螺旋桨转动,所述水深传感器用于探测所述螺旋桨组件的浸没深度,在所述无人养殖船内设置称重传感器和中央处理器,所述称重传感器用于测量所述无人养殖船中的载重,所述中央处理器用于控制所述升降驱动组件工作;
9.步骤2、将所述无人养殖船置于水中,通过转动电机驱动所述螺旋桨转动,所述无人养殖船进行撒料或装料过程中,利用所述水深传感器实时采集螺旋桨的浸没深度数据,利用所述称重传感器实时采集所述无人养殖船的载重数据,并将所述浸没深度数据和所述载重数据传递给所述中央处理器,所述中央处理器对所述浸没深度数据和所述载重数据进行分析处理,发出指令控制所述升降组件工作,改变所述螺旋桨组件的浸没深度。
10.进一步地,所述升降驱动组件包括升降架、丝杠、升降电机和滑块,所述丝杠设在所述升降架内,所述升降电机安装在所述升降架上并确定所述丝杠转动,所述滑块通过丝杠螺母套设在所述丝杠上,所述浸没杆固定在所述滑块上。
11.进一步地,在步骤2中,当所述无人养殖船置于水中时,所述螺旋桨组件与所述水面有一定距离。
12.进一步地,在步骤2中,在所述无人养殖船撒料过程中,通过所述升降驱动组件驱动所述浸没杆下降,在所述无人养殖船装料过程中,通过所述升降驱动组件驱动所述浸没杆上升。
13.进一步地,所述无人养殖船包括撒料箱,所述撒料箱顶部设有进料口,所述撒料箱底部设有第一出料口,所述第一出料口底部设有绞龙送料器和驱动所述绞龙送料器转动的送料电机,所述绞龙送料器下方设有第二出料口,所述第二出料口下方设有倾斜的抛料盘和驱动所述抛料盘转动的抛料电机。
14.进一步地,所述称重传感器设在所述撒料箱底部。
15.与现有技术相比,本发明具有以下优点和有益效果:
16.1.本发明所述的一种无人养殖船螺旋桨推进装置的浸没深度自主调节方法,采用外挂式螺旋桨,不需要设置压载水系统,能够对无人养殖船进行推进,且螺旋桨组件与升降驱动组件两者的运动互不影响,通过升降驱动组件调整螺旋桨组件的浸没深度时,不影响螺旋桨的旋转运动,进而不影响无人养殖船的运动。
17.2.本发明所述的一种无人养殖船螺旋桨推进装置的浸没深度自主调节方法,螺旋桨组件在升降驱动组件的作用下可自主调节至合适浸没深度,避免无人养殖船在满载、空载及撒饵作业时由于吃水变化而导致螺旋桨“出水”,确保无人养殖船螺旋桨具有良好的推进效率。
附图说明
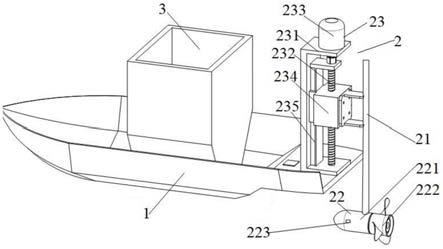
18.图1为本发明的整体结构示意图。
19.图2为本发明的控制原理图。
20.图3为本发明撒料箱的结构示意图。
21.其中:1、无人养殖船;2、螺旋桨推进装置;21、浸没杆;22、螺旋桨组件;221、螺旋桨;222、转动电机;223、水深传感器;23、升降驱动组件;231、升降架;232、丝杠;233、升降电机;234、滑块;235、导轨;3、撒料箱;31、绞龙送料器;32、送料电机;33、抛料盘;34、抛料电机;35、电池;36、控制器。
具体实施方式
22.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述。
23.在本发明的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对
本发明的限制。此外,术语“第一”、“第二”等仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”等的特征可以明示或者隐含地包括一个或者更多个该特征。在本发明的描述中,除非另有说明,“多个”的含义是两个或两个以上。
24.相关技术中,无人养殖船1的尺寸为(l
×
b
×
d)约为1200
×
720
×
320mm,采用铝合金制造,船体尺度和重量都很小,出于功能需求、结构布置、成本节约等方面的考虑,无人养殖船1未设置压载水系统,使用的螺旋桨221一般都是固定式安装,螺旋桨221设在无人养殖船1外侧,通过电机带动转动进而推动无人养殖船1运动,无法依据需要调整螺旋桨221浸没深度。为了解决螺旋桨221“出水”问题,本技术提供一种无人养殖船螺旋桨推进装置的浸没深度自主调节方法,参照图1
‑
图2所示,包括:
25.步骤1、在无人养殖船1上尾部设置螺旋桨推进装置2,螺旋桨推进装置2包括浸没杆21、螺旋桨组件22和升降驱动组件23,螺旋桨组件22与浸没杆21的底部相连,升降驱动组件23设在无人养殖船1上,升降驱动组件23的动力输出端与浸没杆21相连,螺旋桨组件22包括螺旋桨221、转动电机222和水深传感器223,转动电机222用于驱动螺旋桨221转动,水深传感器223用于探测螺旋桨组件22的浸没深度,在无人养殖船1内设置称重传感器和中央处理器,称重传感器用于测量无人养殖船1中的载重,中央处理器用于控制升降驱动组件23工作;
26.步骤2、将无人养殖船1置于水中,通过转动电机222驱动螺旋桨221转动,无人养殖船1进行撒料或装料过程中,利用水深传感器223实时采集螺旋桨221的浸没深度数据,利用称重传感器实时采集无人养殖船1的载重数据,并将浸没深度数据和载重数据传递给中央处理器,中央处理器对浸没深度数据和载重数据进行分析处理,发出指令控制升降组件工作,改变螺旋桨组件22的浸没深度。
27.本发明通过设置外挂式螺旋桨组件22是单独的模块,通过升降驱动组件23驱动螺旋桨组件22升降,在调节螺旋桨221浸没深度时,螺旋桨221仍然能够通过转动电机222驱动旋转,螺旋桨221依然对无人养殖船1有推进作用。螺旋桨组件22在升降驱动组件23的作用下可自主调节至合适浸没深度,避免无人养殖船1在满载、空载及撒饵作业时由于吃水变化而导致螺旋桨221“出水”,确保无人养殖船1的螺旋桨221具有良好的推进效率。
28.为了严格调节螺旋桨221的浸没深度,升降驱动组件23为滚珠丝杠就,升降驱动组件23包括升降架231、丝杠232、升降电机233和滑块234,丝杠232设在升降架231内,升降电机233安装在升降架231上并确定丝杠232转动,滑块234通过丝杠232螺母套设在丝杠232上,浸没杆21固定在滑块234上,通过严格控制丝杠232转动圈数,可以控制浸没杆21升降的距离,进而控制螺旋桨221的浸没深度,且丝杠232和滑块234的配合具有自锁性,以保证螺旋桨组件22浸没深度调节完成后,相对位置不会发生改变。
29.通过中央处理器可以控制升降电机在任意时刻启停,以保证螺旋桨推进装置上下位移可控、位置可定,从而可以实现螺旋桨221浸没深度调节的自动化、可控化。
30.在步骤2中,当无人养殖船1置于水中时,螺旋桨组件22与水面有一定距离。
31.在螺旋桨221对无人养殖船1推进过程中,螺旋桨221浆叶距离水面太近,空气容易被吸入而形成气泡,这对螺旋桨221推进效率具有极大的影响,所以应避免螺旋桨221空泡现象的发生。而空泡数可衡量螺旋桨221是否发生空泡现象,计算公式为:
[0032][0033]
p=p
a
+ρgh
[0034]
式中:σ为空泡数,p为水静压力,p
v
为水汽化压力,v为来流速度,p
a
为大气压力,ρ为水密度,g为重力加速度,h为桨叶浸没深度。
[0035]
由上式可以看出,在p
a
及v一定的情况下,浆叶浸没深度h越大,则空泡数σ就越大,空泡数σ越大,越不易发生空泡现象。因此,在条件允许情况下,尽量增加螺旋桨221浸没深度h,可以增大空泡数,有助于提高螺旋桨221推进效率,因此,在无人养殖船1载重变小时,通过升降驱动组件23驱动螺旋桨组件22下降,使螺旋桨组件22与水面有一定距离,可以避免螺旋桨221空泡现象的发生,防止螺旋桨221“出水”影响螺旋桨221的推进效率。
[0036]
具体地,在步骤2中,在无人养殖船1撒料过程中,通过升降驱动组件23驱动浸没杆21下降,在无人养殖船1装料过程中,通过升降驱动组件23驱动浸没杆21上升。
[0037]
本发明中,参照图3所示,无人养殖船1包括撒料箱3,撒料箱3顶部设有进料口,撒料箱3底部设有第一出料口,第一出料口底部设有绞龙送料器31和驱动绞龙送料器31转动的送料电机32,绞龙送料器31下方设有第二出料口,第二出料口下方设有倾斜的抛料盘33和驱动抛料盘33转动的抛料电机34,称重传感器设在撒料箱3底部,抛料电机34和送料电机32均通过控制器36控制工作且通过电池35供电。
[0038]
在使用过程中,饵料通过进料口进入到撒料箱3中,无人养殖船1进行撒料时,饵料通过第一出料口出来,绞龙送料机将饵料输送到抛料盘33上,抛料电机34驱动抛料盘33转动,通过离心力将饵料抛出。
[0039]
显然,本领域的技术人员可以对本发明进行各种改动和变型而不脱离本发明的精神和范围。这样,倘若本发明的这些修改和变型属于本发明权利要求及其等同技术的范围之内,则本发明也意图包含这些改动和变型在内。