1.本发明涉及运维船登靠技术领域,尤其涉及一种运维船登靠装备和运维船。
背景技术:
2.随着我国海洋平台和海上风电的发展,与沿海和深海平台运维的相关问题也受到了大家的广泛关注。在海上实施登靠作业时,由于受到风、浪和潮等各种恶劣环境的影响,运维船容易发生横摇、纵摇和升沉等随机运动,登靠人员在登靠时受到运维船随机运动的影响,使得运维船登靠时的平稳性和安全性降低。
3.因此,如何提高运维船登靠的平稳性和安全性,是本领域技术人员目前需要解决的技术问题。
技术实现要素:
4.有鉴于此,本发明的目的在于提供一种运维船登靠装备,以提高运维船登靠的平稳性和安全性。
5.为了实现上述目的,本发明提供了如下技术方案:
6.一种运维船登靠装备,包括:
7.设置于船舶上的液压补偿机构,所述液压补偿机构能够对所述船舶的随机运动进行补偿;
8.登靠走廊,所述登靠走廊设置有能够存放待转移货物或者容纳待转移人员的放置部;以及
9.连接所述液压补偿机构与所述登靠走廊的机械手,并且所述机械手能够带动所述登靠走廊移动。
10.优选地,在上述运维船登靠装备中,所述液压补偿机构与所述机械手和所述登靠走廊与所述机械手均为转动连接。
11.优选地,在上述运维船登靠装备中,所述机械手包括三个机械臂,分别为第一机械臂、第二机械臂和第三机械臂,所述第一机械臂与所述液压补偿机构、所述第二机械臂与所述第一机械臂和所述第三机械臂与所述第二机械臂均为转动连接。
12.优选地,在上述运维船登靠装备中,所述第三机械臂、所述第二机械臂和所述登靠走廊之间通过第一液压铰连接,所述第二机械臂和所述第一机械臂之间通过第二液压铰连接。
13.优选地,在上述运维船登靠装备中,所述第一机械臂与所述液压补偿机构之间通过球铰链连接。
14.优选地,在上述运维船登靠装备中,还包括连接所述第三机械臂和所述登靠走廊的钢绞线。
15.优选地,在上述运维船登靠装备中,所述液压补偿机构包括用于安装所述机械手的底座和设置于所述底座的下方的多个液压杆。
16.优选地,在上述运维船登靠装备中,所述液压杆的数量为三个,分别为第一液压杆、第二液压杆和第三液压杆。
17.一种运维船,包括如上任意一项所述的运维船登靠装备。
18.使用本发明所提供的运维船登靠装备时,由于登靠走廊设置有能够存放待转移货物或者容纳待转移人员放置部,因此待转移货物或者待转移人员能够进入登靠走廊,然后由与登靠走廊转动连接的机械手带动登靠走廊移动,待机械手将登靠走廊移动至登靠位置后,将待转移货物进行卸载,待转移人员直接登靠,能够实现对待转移货物和待转移人员的运送;由于船舶上设置有液压补偿机构,液压补偿机构能够对船舶的随机运动进行补偿,因此能够减少海上风、浪和潮等恶劣环境使船舶发生横摇、纵摇和升沉等随机运动的现象,减小海上恶劣环境对船舶、船舶上的登靠走廊和机械手所造成的影响,提高运维船登靠的平稳性和安全性。
附图说明
19.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
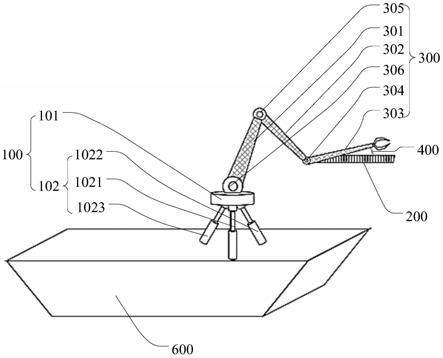
20.图1为本发明实施例所提供的一种运维船登靠装备的结构示意图;
21.图2为本发明实施例所提供的一种运维船登靠装备的登靠走廊放置在漂浮式平台的登靠位置时的结构示意图;
22.图3为本发明实施例所提供的一种运维船登靠装备使待转移人员进入的示意图;
23.图4为本发明实施例所提供的一种运维船登靠装备对待转移人员进行转移过程中的示意图;
24.图5为本发明实施例所提供的一种运维船登靠装备使待转移人员登靠漂浮式平台的示意图。
25.其中,100为液压补偿机构,101为底座,102为液压杆,1021为第一液压杆,1022为第二液压杆,1023为第三液压杆,200为登靠走廊,300为机械手,301为第一机械臂,302为第二机械臂,303为第三机械臂,304为第一液压铰,305为第二液压铰,306为球铰,400为钢绞线,500为漂浮式平台,600为船舶。
具体实施方式
26.有鉴于此,本发明的核心在于提供一种运维船登靠装备,以提高运维船登靠的平稳性和安全性。
27.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
28.如图1至图5所示,本发明实施例公开了一种运维船登靠装备,包括液压补偿机构100、登靠走廊200和机械手300。
29.液压补偿机构100设置于船舶600上,液压补偿机构100能够对船舶600的随机运动进行补偿;登靠走廊200设置有能够存放待转移货物或者容纳待转移人员的放置部;机械手300连接液压补偿机构100与登靠走廊200,并且机械手300能够带动登靠走廊200移动。
30.使用本发明所提供的运维船登靠装备时,由于登靠走廊200设置有能够存放待转移货物或者容纳待转移人员放置部,因此待转移货物或者待转移人员能够进入登靠走廊200,然后由与登靠走廊200转动连接的机械手300带动登靠走廊200移动,待机械手300将登靠走廊200移动至登靠位置后,将待转移货物进行卸载,待转移人员直接登靠,能够实现对待转移货物和待转移人员的运送;由于船舶600上设置有液压补偿机构100,液压补偿机构100能够对船舶600的随机运动进行补偿,因此能够减少海上风、浪和潮等恶劣环境使船舶600发生横摇、纵摇和升沉等随机运动的现象,减小海上恶劣环境对船舶600、船舶600上的登靠走廊200和机械手300所造成的影响,提高运维船登靠的平稳性和安全性。
31.需要说明的是,上述液压补偿机构100与机械手300之间和登靠走廊200与机械手300之间均可以通过转动连接方式连接,也可以通过固定方式连接,只要是能够满足使用要求的类型均属于本发明保护范围内;优选地,本发明实施例所提供的液压补偿机构100与机械手300和登靠走廊200与机械手300均为转动连接,以便于增加机械手300的运动自由度和拓展机械手300的运动范围。
32.进一步地,机械手300包括三个机械臂,分别为第一机械臂301、第二机械臂302和第三机械臂303,第一机械臂301与液压补偿机构100、第二机械臂302与第一机械臂301和第三机械臂303与第二机械臂302均为转动连接,以便于增加机械手300的运动灵活度,拓展机械手300的运动范围。
33.需要说明的是,上述第一机械臂301与液压补偿机构100、第二机械臂302与第一机械臂301和第三机械臂303与第二机械臂302之间均可以通过合页铰链、虎克铰链、万向节或者球铰链306链等零件连接,只要是能够实现转动连接的方式均属于本发明保护范围内;优选地,本发明实施例所提供的第三机械臂303、第二机械臂302和登靠走廊200之间通过第一液压铰304连接,第二机械臂302和第一机械臂301之间通过第二液压铰305连接,以实现相邻的机械臂之间能够转动连接,提高机械手300的运动灵活性;第一机械臂301与液压补偿机构100之间通过球铰链306连接,以便于使机械手300能够在液压补偿机构100上转动,通过机械手300带动登靠走廊200转动,从而调整登靠走廊200在漂浮式平台500上的登靠位置,拓展该运维船登靠装备在漂浮式平台500上的登靠范围,提高该运维船登靠装备对登靠位置的适应性。
34.本发明所提供的运维船登靠装备还包括连接第三机械臂303和登靠走廊200的钢绞线400,以便于通过钢绞线400和上文所述的第一液压铰304将登靠走廊200安装在机械手300上,同时,通过调整钢绞线400的长度能够调整登靠走廊200与第三机械臂303之间的夹角,将登靠走廊200与第三机械臂303之间的夹角调整至能够安全运送待转移货物或者待转移人员的安全夹角。
35.另外,为了提高该运维船登靠装备的安全性,还可以在登靠走廊200的两端设置便于待转移人员抓握的扶手;在登靠走廊200和漂浮式平台500上设置能够相互配合的定位结构,以便于待机械手300将登靠走廊200移动至漂浮式平台500的登靠位置后,通过登靠走廊200和漂浮式平台500上设置的定位结构将登靠走廊200和漂浮式平台500连接在一起,限制
登靠走廊200与漂浮式平台500之间的相对移动,提高待转移人员的登靠安全性。
36.进一步地,液压补偿机构100包括底座101和设置于底座101的下方的多个液压杆102,以便于将机械手300安装于底座101上,通过液压杆102的伸缩对船舶600的随机运动进行补偿,提高运维船登靠的平稳性和安全性。
37.需要说明的是,本发明对液压杆102的数量不作具体限定,实际应用中,可以根据实际工况对液压杆102的数量作适应性调整,只要是能够满足使用要求的数量均属于本发明保护范围内;优选地,本发明实施例所提供的液压杆102的数量为三个,分别为第一液压杆1021、第二液压杆1022和第三液压杆1023,通过第一液压杆1021、第二液压杆1022和第三液压杆1023能够补偿船舶600的横摇、纵摇和升沉三个自由度的运动,提高登靠时的平稳性和安全性。
38.此外,本发明还公开了一种运维船,包括如上任意一项所述的运维船登靠装备,因此兼顾了上述运维船登靠装备的所有技术效果,本文在此不再一一赘述。
39.本发明的说明书和权利要求书及上述附图中的术语“第一”和“第二”等是用于区别不同的对象,而不是用于描述特定的顺序。此外术语“包括”和“具有”以及他们任何变形,意图在于覆盖不排他的包含。例如包含了一系列步骤或单元的过程、方法、系统、产品或设备没有设定于已列出的步骤或单元,而是可包括没有列出的步骤或单元。
40.对所公开的实施例的上述说明,使本领域专业技术人员能够实现或使用本发明。对这些实施例的多种修改对本领域的专业技术人员来说将是显而易见的,本文中所定义的一般原理可以在不脱离本发明的精神或范围的情况下,在其它实施例中实现。因此,本发明将不会被限制于本文所示的这些实施例,而是要符合与本文所公开的原理和新颖特点相一致的最宽的范围。