1.本技术实施例涉及无人机技术领域,尤其涉及一种气体追踪无人机。
背景技术:
2.在存在气体泄露的领域中,例如工厂生产中,很容易产生有毒有害气体或发生气体泄露,这些气体有可能对生产维护人员和生态环境造成极大的人身伤害;因此,需要及时寻找产生气体泄露的物体和被气体污染的物体,并进行处理,但是气体泄漏时环境负责恶劣,无法通过人工去寻找气体泄露源和气体污染源;现有的方案是通过固定检测点对气体进行检测,但是无法对所有气体泄露源和气体污染源进行全面有效地检测,同时搜索过程过久,效率较低。
技术实现要素:
3.本技术实施例提供一种气体追踪无人机,以解决现有技术中对目标源的气体检测和搜索过程过久,效率较低的问题。
4.在第一方面,本技术实施例提供了一种气体追踪无人机,包括:无人机主体和控制终端;所述无人机主体上设有处理器、气体检测模块、gps定位模块和电源模块;所述处理器连接所述控制终端、所述气体检测模块和所述gps定位模块;所述电源模块用于供电;
5.所述气体检测模块用于检测目标气体浓度值并发送到所述处理器;
6.所述处理器用于将所述气体浓度值与设定气体浓度范围进行对比,若所述气体浓度值在设定气体浓度范围内,则控制所述gps定位模块采集定位数据,接收所述定位数据并发送到所述控制终端。
7.进一步的,所述无人机主体上还设有摄像头,所述摄像头与所述处理器连接。
8.进一步的,所述无人机主体上还设有避障模块,所述避障模块与所述处理器连接。
9.进一步的,所述避障模块采用红外避障传感器。
10.进一步的,所述气体检测模块可拆卸地设于所述无人机主体上。
11.进一步的,所述无人机主体上还设有无线通信模块,所述处理器通过所述无线通信模块与所述控制终端连接。
12.进一步的,所述无人机主体上还设有存储模块,所述存储模块连接所述处理器和所述无线通信模块。
13.进一步的,所述无人机主体上还设有飞行动力模块,所述飞行动力模块包括电机、电调和螺旋桨;所述处理器连接所述电机和所述电调,所述电机和所述电调连接所述螺旋桨。
14.进一步的,所述电源模块包括电池组和usb接口。
15.进一步的,所述控制终端为pc端或手持终端。
16.本技术实施例在无人机上设置气体检测模块和gps定位模块,通过气体检测模块检测目标气体浓度值发送到处理器进行判断是否与要寻找的气体浓度范围对应,若所述气
体浓度值在设定气体浓度范围内,则控制所述gps定位模块采集定位数据,接收所述定位数据并发送到所述控制终端;实现快速有效地搜索目标源,减少环境因素的影响,提高搜索效率,节省人力物力。
附图说明
17.图1是本技术实施例提供的一种气体追踪无人机的结构示意图;
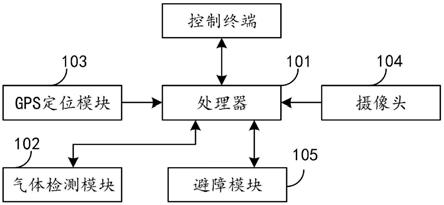
18.图2是本技术实施例提供的一种气体追踪无人机的模块结构示意图;
19.其中,101、处理器;102、气体检测模块;103、gps定位模块;104、摄像头;105、避障模块;106、飞行动力模块。
具体实施方式
20.为了使本技术的目的、技术方案和优点更加清楚,下面结合附图对本技术具体实施例作进一步的详细描述。可以理解的是,此处所描述的具体实施例仅仅用于解释本技术,而非对本技术的限定。另外还需要说明的是,为了便于描述,附图中仅示出了与本技术相关的部分而非全部内容。在更加详细地讨论示例性实施例之前应当提到的是,一些示例性实施例被描述成作为流程图描绘的处理或方法。虽然流程图将各项操作(或步骤)描述成顺序的处理,但是其中的许多操作可以被并行地、并发地或者同时实施。此外,各项操作的顺序可以被重新安排。当其操作完成时所述处理可以被终止,但是还可以具有未包括在附图中的附加步骤。所述处理可以对应于方法、函数、规程、子例程、子程序等等。
21.本技术提供的气体追踪无人机在无人机上设置气体检测模块和gps定位模块,通过气体检测模块检测目标气体浓度值发送到处理器进行判断是否与要寻找的气体浓度范围对应,若所述气体浓度值在设定气体浓度范围内,则控制所述gps定位模块采集定位数据,接收所述定位数据并发送到所述控制终端;实现快速有效地搜索目标源,减少环境因素的影响,提高搜索效率,节省人力物力。
22.目前,在存在气体泄露的领域中,例如工厂生产中,很容易产生有毒有害气体或发生气体泄露,这些气体有可能对生产维护人员造成极大的人身伤害;因此,需要及时寻找产生气体泄露的物体和被气体污染的物体,并进行处理,但是气体泄漏时环境负责恶劣,无法通过人工去寻找气体泄露源和气体污染源;现有的方案是通过固定检测点对气体进行检测,但是无法对所有气体泄露源和气体污染源进行全面有效地检测,同时搜索过程过久,效率较低。
23.基于此,提供本技术实施例的气体追踪无人机,来避免现有技术中对目标源的气体检测和搜索过程过久,效率较低的问题。
24.图1为本技术实施例提供的一种气体追踪无人机的结构示意图。参考图1和图2,该系统具体包括:无人机主体和控制终端;所述无人机主体上设有处理器101、气体检测模块102、gps定位模块103、摄像头104、避障模块105和电源模块。
25.其中,所述处理器101连接所述控制终端、所述气体检测模块102、所述gps定位模块103、所述摄像头104和所述避障模块105;其中,所述气体检测模块102可拆卸地设于所述无人机主体上;所述电源模块用于供电。
26.其中,所述气体检测模块102用于检测目标气体浓度值并发送到所述处理器101;
所述处理器101用于将所述气体浓度值与设定气体浓度范围进行对比,若所述气体浓度值在设定气体浓度范围内,则控制所述gps定位模块103采集定位数据,接收所述定位数据并发送到所述控制终端。
27.可以理解的是,将采集的气体浓度值与设定气体浓度范围进行对比得到对比结果的方式有多种,本技术实施例对此不作限定。
28.具体的,通过控制终端对物体的气体浓度范围进行设置并记录,处理器101控制气体检测模块102搜索与该气体浓度值匹配的物体,搜索成功,则处理器101控制gps定位模块103将该目标物体的gps位置信息进行采集,并传输到控制终端中,并锁定目标物体实现追踪。
29.其中,气体检测模块102包括一种或多种气体传感器的的组合;示例性的,气体检测模块102可以根据具体情况和用户需求进行配置,如需要检测目标源的二氧化碳气体时,采用二氧化碳传感器作为气体检测模块102安装于无人机主体上,对目标源进行检测,获得目标二氧化碳浓度值进行处理对比,根据gps定位模块得到目标源的定位数据发送到控制终端;如需要检测目标源的二氧化碳和二氧化硫气体时,采用二氧化碳传感器和二氧化硫传感器进行组合作为气体检测模块102安装于无人机主体上,对目标源进行检测,获取目标气体浓度值进行处理对比,根据gps定位模块得到目标源的定位数据发送到控制终端。
30.其中,所述摄像头104用于采集图像数据并发送到处理器101,所述处理器101接收图像数据进行分析并结合避障模块105来控制无人机的飞行。
31.示例性的,所述避障模块105采用红外避障传感器。
32.可选的,所述无人机主体上还设有飞行动力模块106,所述飞行动力模块106包括电机、电调和螺旋桨;所述处理器101连接所述电机和所述电调,所述电机和所述电调连接所述螺旋桨。
33.具体的,通过摄像头104采集图像数据发送到处理器101,通过处理器101对图像数据进行分析处理判断是否需要避障,同时可以将图像数据传输到控制终端,从而使用者通过图像内容来控制无人机的飞行;另外,通过摄像头104结合避障模块105,采集图像数据和红外数据发送到处理器101或控制终端进行处理,来实现对无人机的飞行控制;可以理解的是,通过处理器101对数据进行分析处理判断的方式有多种,本技术实施例对此不作限定。
34.示例性的,控制终端可以通过控制飞行动力模块106来控制无人机的飞行,其中,通过发送工作信号到电机控制电机的运转从而带动螺旋桨转动,实现无人机的飞行,同时发送工作控制信号控制电调,从而控制电机的运转速度,控制螺旋桨的转动速度,从而控制无人机的飞行速度。
35.可选的,所述无人机主体上还设有温度传感器,所述温度传感器与所述处理器101连接;其中,通过设置温度传感器采集温度值并发送到处理器101,处理器101接收所述温度值与设定的温度范围进行对比,将对比结果发送到控制终端,若温度值不在设定的温度范围内,则控制终端控制无人机的飞行轨迹改变,如停止前进、改变方向或者返航等,以实现避开温度过高或过低的区域。
36.可选的,所述无人机主体上还设有无线通信模块,所述处理器101通过所述无线通信模块与所述控制终端连接;示例性的,无线通信模块可以采用图传模块,将无人机的数据传输到控制终端。
37.可选的,所述无人机主体上还设有存储模块,所述存储模块连接所述处理器101和所述无线通信模块;示例性的,通过气体检测模块102、摄像头104或其他传感器采集的数据存储在存储模块上,以便处理器101和控制终端调用。
38.具体的,将摄像头104采集的图像数据、气体检测模块102采集的气体浓度值以及对应的gps定位模块103采集的位置数据存储在存储模块,控制终端可以随时调取存储模块存储的数据。
39.可选的,所述电源模块包括电池组;其中,通过电池组为无人机上的各个模块进行供电,实现各个模块的正常工作;其中,所述电源模块还包括usb接口,电池组可以为可充电电池组,通过设置usb接口实现对电池组的充电。
40.可选的,所述控制终端为pc端或手持终端;其中,可以通过pc端对无人机进行控制,也可以通过手持终端的app和小程序等与无人机进行交流和对无人机进行控制。
41.具体的,本技术实施例的无人机可以实现搜索过程自动化,操作者可以通过控制终端控制设定无人机的搜索范围和搜索时间,无人机可以通过物体的气体去自动搜索该物体,搜索到与其气体范围匹配的物体,锁定该物体,并将该物体的位置信息返回到控制终端中;如果该物体移动,无人机则会锁定目标物体并追踪该物体;其中,该无人机具有避障和自动返航功能,控制终端可以设置无人机在搜索时间内未搜索到该物体,则自动返航。
42.上述,本技术实施例在无人机上设置气体检测模块102和gps定位模块103,通过气体检测模块102检测目标气体浓度值发送到处理器101进行判断是否与要寻找的气体浓度范围对应,若所述气体浓度值在设定气体浓度范围内,则控制所述gps定位模块103采集定位数据,接收所述定位数据并发送到所述控制终端;实现快速有效地搜索目标源,减少环境因素的影响,提高搜索效率,节省人力物力。
43.上述仅为本技术的较佳实施例及所运用的技术原理。本技术不限于这里所述的特定实施例,对本领域技术人员来说能够进行的各种明显变化、重新调整及替代均不会脱离本技术的保护范围。因此,虽然通过以上实施例对本技术进行了较为详细的说明,但是本技术不仅仅限于以上实施例,在不脱离本技术构思的情况下,还可以包括更多其他等效实施例,而本技术的范围由权利要求的范围决定。