1.本发明涉及飞行器及交通工具领域,特别涉及两种无人遥控的多旋桨飞行器和两种有人驾驶的多旋桨飞行器。
背景技术:
2.目前市面上的多旋桨飞行器以大疆无人机为典型代表,发展出了基于叶片式螺旋桨产生升力和飞行动力四旋翼乃至八旋翼的无人飞行器,以及由这些无人飞行器增加驾驶座舱和驾驶机构演变而来的有人驾驶飞行器。这些飞行器普遍采用竹蜻蜓式的叶片式螺旋桨作为升力动力机构,有利的一面是这种叶式螺旋桨结构简单,生产成本低;但是不利的一面是,叶式螺旋桨旋转时直接冲击切削空气产生升力,无风条件下,飞行器空中悬停时自然易于维持稳定,而经过实际测试,在有横风条件下,横风直接冲击旋转桨叶,两相作用下,无人机非常容易偏离悬停位置,非常不利于有风条件下的悬停控制;并且,飞行器在平飞高速前进过程中,在迎风高速飞行时,叶片式螺旋桨的翼尖与前进时的迎风快速层流相互击打冲击,风阻变大也不利于进一步提高飞行速度;并且也会容易产生激波,如果翼尖较软,还会引发震颤,导致飞行稳定性降低。以上这些问题都是普通叶片式螺旋桨固有属性所带来的固有缺陷,无法仅仅依靠优异的控制方法来避免。
3.此外,这些采用叶片式螺旋桨多旋翼飞行器,在叶片式螺旋桨高速旋转时,桨叶尖非常容易切割手指、伤人和撞击损坏叶片,所以普遍需要加装防护圈来加以阻挡和防护,但是即使加装防护圈后,飞行器在靠近非平面物体时也依旧容易高速打坏桨叶,在掠过树枝附近时也依旧容易飞行时钩挂树枝,在空中悬停紧急捕捉无人机时依旧容易切割手指。
4.因此基于这些问题,有必要提出一种,既能适应迎风快速层流或横风层流,又能减轻桨叶伤人和容易钩挂桨叶问题的飞行器新方案。
技术实现要素:
5.本发明基于外缘环翼叶式螺旋桨来替代传统的叶片式螺旋桨,并将其应用于多旋桨飞行器,使飞行器高速平飞过程中以外缘环翼叶式螺旋桨的外缘扁平环翼来切割和适应迎风快速层流或横风层流,使迎风或横风层流经外缘扁平环翼切割引流后,避免迎风或横风层流对环翼内侧桨叶产生直接气流冲击,避免环内桨叶翼尖产生激波震颤,避免或减轻这些原因带来的风阻较大、飞行不稳或悬停风吹偏航问题,并且利用外缘扁平环翼来屏护环内桨叶,防止桨叶直接伤人和钩挂树枝线缆等飞行障碍物。具体的,还提供了两种无人遥控的多旋桨飞行器和两种有人驾驶的多旋桨飞行器,其技术方案如下:
6.方案1:一种多旋桨飞行器,包括:多个外缘环翼叶式螺旋桨1、多个电动机2、机身3、起落架31、电源及驱控单元4、惯性测量单元5、通信收发单元6、无线遥控装置60;其中,所述外缘环翼叶式螺旋桨1又包括:扁平外缘环翼101、多个桨叶102、盘毂103、转轴104;所述电源及驱控单元4又包括:电池单元41、驱动单元42、控制单元43;所述扁平外缘环翼101为扁平圆环结构,所述多个桨叶102均匀散布且连接于扁平外缘环翼101和盘毂103之间,转轴
104连接固定盘毂103,由电动机2连接和驱动转轴104从而带动整个外缘环翼叶式螺旋桨1旋转;
7.所述机身3上均匀分布连接多个外缘环翼叶式螺旋桨1和多个电动机2,由多个电动机2分别驱动多个外缘环翼叶式螺旋桨1旋转产生升力和飞行动力;所述起落架31固定于机身3用于缓冲起降;所述惯性测量单元5和通信收发单元6固定于机身3;所述通信收发单元6与无线遥控装置60通过无线通信匹配连接;
8.所述电动机2、驱动单元42、控制单元43、惯性测量单元5、通信收发单元6电连接电池单元41;电池单元41在充蓄电后为整个飞行器的耗电单位供电、在电量不足时重新充电蓄能;所述驱动单元42又以不同输出通道电连接各个电动机2以输出功率驱动控制其运转;所述驱动单元42电连接于控制单元43,控制单元43参与对驱动单元42的功率输出控制和运行控制;惯性测量单元5电连接于控制单元43,惯性测量单元5测得飞行器的三维位置、三维速度、三维加速度、三轴角度、三维角速度、飞行方向、飞行高度数据并传至控制单元43,控制单元43根据这些飞行运动数据对当前飞行器姿态的控制参数进行解算、优化、误差补偿,并调整和优化对驱动单元42的功率输出控制;所述通信收发单元6接收来自无线遥控装置60发出的操作动作指令和输入信号并传送给控制单元43;控制单元43通过通信收发单元6输出运行参数和控制参数给无线遥控装置60,用户提供数据参考辅助用户实现无线遥控飞行;
9.所述无线遥控装置60与通信收发单元6通过无线通信匹配连接,用户操作无线遥控装置60经通信收发单元6控制和调节电源及驱控单元4的运行参数、运行及输出功率,从而控制和调节多个电动机2和多个外缘环翼叶式螺旋桨1的转速,使飞行器实现加减速飞行、空中悬停、垂直起降;通过使多个外缘环翼叶式螺旋桨1相互之间产生转速差,实现飞行翻滚、飞行转向、俯仰飞行、偏航飞行;并且在快速平飞过程中,外缘环翼叶式螺旋桨1利用其外缘扁平环翼101来切割和适应迎风快速层流或横风层流,使迎风或横风层流经外缘扁平环翼101切割引流后,避免迎风或横风层流对环翼内侧桨叶102产生直接气流冲击,避免环内桨叶102翼尖产生激波震颤,避免或减轻这些原因带来的风阻较大、飞行不稳或悬停风吹偏航问题。
10.方案2:一种多旋桨飞行器,包括:多个外缘环翼叶式螺旋桨1、多个电动机2、机身3、起落架31、驾驶舱32、电源及驱控单元4、惯性测量单元5、驾驶员操纵装置7、电子仪表装置71;其中,所述外缘环翼叶式螺旋桨1又包括:扁平外缘环翼101、多个桨叶102、盘毂103、转轴104;所述电源及驱控单元4又包括:电池单元41、驱动单元42、控制单元43;所述扁平外缘环翼101为扁平圆环结构,所述多个桨叶102均匀散布且连接于扁平外缘环翼101和盘毂103之间,转轴104连接固定盘毂103,由电动机2连接和驱动转轴104从而带动整个外缘环翼叶式螺旋桨1旋转;
11.所述机身3上均匀分布连接多个外缘环翼叶式螺旋桨1和多个电动机2,由多个电动机2分别驱动多个外缘环翼叶式螺旋桨1旋转产生升力和飞行动力;所述起落架31固定于机身3用于缓冲起降;所述驾驶舱32连接固定于机身3,驾驶舱32内设置有驾驶员操纵位;所述驾驶员操纵装置7设置于驾驶舱32内供驾驶员操纵驾驶;所述惯性测量单元5固定于机身3;电子仪表装置71固定于驾驶舱32内;电子仪表装置71检测及显示续航里程、飞行高度、飞行空速、爬升及下降速率、飞行姿态、飞行航向数据以及电动机2和电源及驱控装置4的运行
数据参数和控制参数,为驾驶员提供数据参考辅助驾驶员驾驶飞行;
12.所述电动机2、驱动单元42、控制单元43、惯性测量单元5、驾驶员操纵装置7电连接电池单元41;电池单元41在充蓄电后为整个飞行器的耗电单位供电、在电量不足时重新充电蓄能;所述驱动单元42又以不同输出通道电连接各个电动机2以输出功率驱动控制其运转;所述驱动单元42电连接于控制单元43,控制单元43参与对驱动单元42的功率输出控制和运行控制;惯性测量单元5电连接于控制单元43,惯性测量单元5测得飞行器的三维位置、三维速度、三维加速度、三轴角度、三维角速度、飞行方向、飞行高度数据并传至控制单元43,控制单元43根据这些飞行运动数据对当前飞行器姿态的控制参数进行解算、优化、误差补偿,并调整和优化对驱动单元42的功率输出控制;驾驶员操作驾驶员操纵装置7发出操作动作指令和输入信号并传送给控制单元43;控制单元43根据操作动作指令控制驱动单元42调节对多个电动机2的功率输出控制以实现对飞行器飞行动作的控制;控制单元43输出运行参数和控制参数给电子仪表装置71,为驾驶员提供数据参考辅助驾驶员驾驶飞行;
13.驾驶员操作驾驶员操纵装置7控制和调节电源及驱控单元4的运行参数、运行及输出功率,从而控制和调节多个电动机2和多个外缘环翼叶式螺旋桨1的转速,使飞行器实现加减速飞行、空中悬停、垂直起降;通过使多个外缘环翼叶式螺旋桨1相互之间产生转速差,实现飞行翻滚、飞行转向、俯仰飞行、偏航飞行;并且在快速平飞过程中,外缘环翼叶式螺旋桨1利用其外缘扁平环翼101来切割和适应迎风快速层流或横风层流,使迎风或横风层流经外缘扁平环翼101切割引流后,避免迎风或横风层流对环翼内侧桨叶102产生直接气流冲击,避免环内桨叶102翼尖产生激波震颤,避免或减轻这些原因带来的风阻较大、飞行不稳或悬停风吹偏航问题。
14.方案3:一种多旋桨飞行器,包括:多个外缘环翼叶式螺旋桨1、多个发动机21、多个舵机22、机身3、起落架31、电源及驱控单元4、惯性测量单元5、通信收发单元6、无线遥控装置60;所述外缘环翼叶式螺旋桨1又包括:扁平外缘环翼101、多个桨叶102、盘毂103、转轴104;所述电源及驱控单元4又包括:电池单元41、驱动单元42、控制单元43;所述扁平外缘环翼101为扁平圆环结构,所述多个桨叶102均匀散布且连接于扁平外缘环翼101和盘毂103之间,转轴104连接固定盘毂103,由发动机21连接和驱动转轴104从而带动整个外缘环翼叶式螺旋桨1旋转;
15.所述机身3上均匀分布连接多个外缘环翼叶式螺旋桨1和多个发动机21,由多个发动机21分别驱动多个外缘环翼叶式螺旋桨1旋转产生升力和飞行动力;所述多个舵机22各自对应连接一个发动机21,舵机22控制发动机21的油门拉动动作;所述起落架31固定于机身3用于缓冲起降;所述惯性测量单元5和通信收发单元6固定于机身3;所述通信收发单元6与无线遥控装置60通过无线通信匹配连接;
16.所述舵机22、驱动单元42、控制单元43、惯性测量单元5、通信收发单元6电连接电池单元41;电池单元41在充蓄电后为整个飞行器的耗电单位供电、在电量不足时重新充电蓄能;所述驱动单元42又以不同输出通道电连接各个舵机22以输出功率驱动控制其运转和执行动作;所述驱动单元42电连接于控制单元43,控制单元43参与对驱动单元42的功率输出控制和运行控制;惯性测量单元5电连接于控制单元43,惯性测量单元5)测得飞行器的三维位置、三维速度、三维加速度、三轴角度、三维角速度、飞行方向、飞行高度数据并传至控制单元43,控制单元43根据这些飞行运动数据对当前飞行器姿态的控制参数进行解算、优
化、误差补偿,并调整和优化对驱动单元42的功率输出控制,通过调节各个舵机22拉动油门动作的力矩,来控制各个发动机21的输出功率,以调整各个外缘环翼叶式螺旋桨1的转速;所述通信收发单元6接收来自无线遥控装置60发出的操作动作指令和输入信号并传送给控制单元43;控制单元43通过通信收发单元6输出运行参数和控制参数给无线遥控装置60,用户提供数据参考辅助用户实现无线遥控飞行;
17.所述无线遥控装置60与通信收发单元6通过无线通信匹配连接,用户操作无线遥控装置60经通信收发单元6控制和调节电源及驱控单元4的运行参数、运行及输出功率,最终通过调节各个舵机22拉动油门动作的力矩,进而控制和调节多个发动机21和多个外缘环翼叶式螺旋桨1的转速,使飞行器实现加减速飞行、空中悬停、垂直起降;通过使多个外缘环翼叶式螺旋桨1相互之间产生转速差,实现飞行翻滚、飞行转向、俯仰飞行、偏航飞行;并且在快速平飞过程中,外缘环翼叶式螺旋桨1利用其外缘扁平环翼101来切割和适应迎风快速层流或横风层流,使迎风或横风层流经外缘扁平环翼101切割引流后,避免迎风或横风层流对环翼内侧桨叶102产生直接气流冲击,避免环内桨叶102翼尖产生激波震颤,避免或减轻这些原因带来的风阻较大、飞行不稳或悬停风吹偏航问题。
18.方案4:一种多旋桨飞行器,包括:多个外缘环翼叶式螺旋桨1、多个发动机21、多个舵机22、机身3、起落架31、驾驶舱32、电源及驱控单元4、惯性测量单元5、驾驶员操纵装置7、电子仪表装置71;其中,所述外缘环翼叶式螺旋桨1又包括:扁平外缘环翼101、多个桨叶102、盘毂103、转轴104;所述电源及驱控单元4又包括:电池单元41、驱动单元42、控制单元43;所述扁平外缘环翼101为扁平圆环结构,所述多个桨叶102均匀散布且连接于扁平外缘环翼101和盘毂103之间,转轴104连接固定盘毂103,由发动机21连接和驱动转轴104从而带动整个外缘环翼叶式螺旋桨1旋转;
19.所述机身3上均匀分布连接多个外缘环翼叶式螺旋桨1和多个发动机21,由多个发动机21分别驱动多个外缘环翼叶式螺旋桨1旋转产生升力和飞行动力;所述多个舵机22各自对应连接一个发动机21,舵机22控制发动机21的油门拉动动作;所述起落架31固定于机身3用于缓冲起降;所述驾驶舱32连接固定于机身3,驾驶舱32内设置有驾驶员操纵位;所述驾驶员操纵装置7设置于驾驶舱32内供驾驶员操纵驾驶;所述惯性测量单元5固定于机身3;电子仪表装置71固定于驾驶舱32内;电子仪表装置71检测及显示续航里程、飞行高度、飞行空速、爬升及下降速率、飞行姿态、飞行航向数据以及发动机21和电源及驱控装置4的运行数据参数和控制参数,为驾驶员提供数据参考辅助驾驶员驾驶飞行;
20.所述舵机22、驱动单元42、控制单元43、惯性测量单元5、驾驶员操纵装置7电连接电池单元41;电池单元41在充蓄电后为整个飞行器的耗电单位供电、在电量不足时重新充电蓄能;所述驱动单元42又以不同输出通道电连接各个舵机22以输出功率驱动控制其运转和执行动作;所述驱动单元42电连接于控制单元43,控制单元43参与对驱动单元42的功率输出控制和运行控制;惯性测量单元5电连接于控制单元43,惯性测量单元5测得飞行器的三维位置、三维速度、三维加速度、三轴角度、三维角速度、飞行方向、飞行高度数据并传至控制单元43,控制单元43根据这些飞行运动数据对当前飞行器姿态的控制参数进行解算、优化、误差补偿,并调整和优化对驱动单元42的功率输出控制,通过调节各个舵机22拉动油门动作的力矩,来控制各个发动机21的输出功率,以调整各个外缘环翼叶式螺旋桨1的转速;驾驶员操作驾驶员操纵装置7发出操作动作指令和输入信号并传送给控制单元43;控制
单元43根据操作动作指令控制驱动单元42调节对各个舵机22的输出功率,来调整各个舵机22拉动发动机21油门的力矩,来控制各个发动机21的输出功率,从而调整各个外缘环翼叶式螺旋桨1的转速,以实现对飞行器飞行动作的控制;控制单元43输出运行参数和控制参数给电子仪表装置71,为驾驶员提供数据参考辅助驾驶员驾驶飞行;
21.驾驶员操作驾驶员操纵装置7控制和调节电源及驱控单元4的运行参数、运行及输出功率,从而控制和调节各个舵机22拉动油门动作的力矩,进而控制和调节多个发动机21和多个外缘环翼叶式螺旋桨1的转速,使飞行器实现加减速飞行、空中悬停、垂直起降;通过使多个外缘环翼叶式螺旋桨1相互之间产生转速差,实现飞行翻滚、飞行转向、俯仰飞行、偏航飞行;并且在快速平飞过程中,外缘环翼叶式螺旋桨1利用其外缘扁平环翼101来切割和适应迎风快速层流或横风层流,使迎风或横风层流经外缘扁平环翼101切割引流后,避免迎风或横风层流对环翼内侧桨叶102产生直接气流冲击,避免环内桨叶102翼尖产生激波震颤,避免或减轻这些原因带来的风阻较大、飞行不稳或悬停风吹偏航问题。
22.进一步地,方案1-4中所述的四种多旋桨飞行器,还包括:多个支撑臂30和/或多个叶片式螺旋桨11和/或多个防护圈10;所述多个支撑臂30均匀散射分布连接于机身3上,所述多个外缘环翼叶式螺旋桨1、或叶片式螺旋桨11、或电动机2、或发动机21、或舵机22各自对应连接于一个支撑臂30;所述多个叶片式螺旋桨11与多个外缘环翼叶式螺旋桨1混合使用,其替换部分外缘环翼叶式螺旋桨1的安装位置,由两种螺旋桨共同产生升力和飞行动力;所述多个防护圈10连接于机身3或支撑臂30,屏护于外缘环翼叶式螺旋桨1或叶片式螺旋桨11的外围,以防止伤人或缓冲飞行冲撞。
23.进一步地,方案1-4中所述的四种多旋桨飞行器,还包括:摄像装置8和/或云台9和/或电子罗盘51和/或气压计52和/或卫星定位模块50;所述摄像装置8固定于机身3,摄像装置8电连接于电源及驱控装置4由其供电和控制摄像装置8通电及拍摄动作,摄像装置8用于记录、拍摄、本地存储图像或视频;或者,所述摄像装置8还设置于云台9上,云台9固定于机身3上,云台9为摄像装置8提供固定、支撑、安装位置,为摄像装置8提供增稳和防抖功能,以及调整摄像装置8水平和俯仰的拍摄角度,云台9电连接于电源及驱控装置4由其供电和控制云台9的通电及转动拍摄动作;或者,所述摄像装置8还通过通信收发单元6与无线遥控装置60实现无线图传,用于飞行器在遥控飞行模式下,实现无线遥控远端监视操作下的辅助飞行;所述电子罗盘51固定于机身3,其电连接于控制单元43和电池单元41,其单独测得飞行方向数据并传至控制单元43,使惯性测量单元5中的飞行方向数据与其作参考校正;所述气压计52也固定于机身3,其电连接于控制单元43和电池单元41,其单独测得飞行高度数据并传至控制单元43,使惯性测量单元5中的飞行高度数据与其作参考校正;所述卫星定位模块50也固定于机身3,其电连接于控制单元43和电池单元41,其测得卫星定位数据为驾驶员提供数据参考辅助驾驶员实现导航飞行;或者,控制单元43将卫星定位数据通过通信收发单元6无线发送至无线遥控装置60,用于飞行器在遥控飞行模式下,为用户提供数据参考辅助用户实现无线遥控飞行和便于丢失后定位找回。
24.进一步地,方案1-4中所述的四种多旋桨飞行器,还包括:降落伞300;所述降落伞300的安全绳连接于机身3;在飞行器处于高空停车的危险情况下,用户操作释放、打开降落伞300,使飞行器通过伞降避免坠毁,从而提高安全系数。
25.进一步地,方案1-4中所述的四种多旋桨飞行器,还包括:燃油发电装置40;所述燃
油发电装置40固定安装于机身3;燃油发电装置40电连接于电源及驱控单元4中的电池单元41;燃油发电装置40主要由燃油引擎和发电机组成,通过燃烧所携带燃料,产生动力带动发电机发电,为电池单元41进行增程充电。
26.作为优选,方案1-4中所述外缘环翼叶式螺旋桨1中扁平外缘环翼101的直截面形状为平板翼型、或平凸翼型、或双凸翼型、或凹凸翼型、或扁三角翼型;所述外缘环翼叶式螺旋桨1中扁平外缘环翼101的扁平翼面的表面是平滑的,或者扁平外缘环翼101的扁平翼面的表面上设置有连续的导流凹槽、或连续的导流凸台、或连续的导流翼刀、或离散的导流凹槽、或离散的导流凸台、或离散的导流翼刀、或离散的导流通孔、或散射状的导流凹槽、或散射状的导流凸台、或散射状的导流翼刀、或散射状的导流通孔,以进一步减弱在飞行器平飞和桨叶102旋转时迎面高速冲击气流对桨叶102升力气流的干扰冲击,增强外缘扁平环翼101对迎风层流或横风层流的切割引流效果;所述外缘环翼叶式螺旋桨1中桨叶102的桨叶数量为两个、或三个、或多个;所述外缘环翼叶式螺旋桨1的叠合层数为单层、或双层、或三层、或多层。
27.作为优选,方案1或3中所述通信收发单元6和无线遥控装置60采用wlan通信模块、或蓝牙通信模块、或zigbee通信模块、或4g/5g通信模块来实现两者之间的无线通信及控制;所述无线遥控装置60包括手机、或遥控腕带、或脑电波控制眼镜、或遥控vr眼镜、或遥控vr头盔、或影像控制头盔、或地面遥控站、或飞行控制遥控器、或飞行控制网络平台;所述起落架31采用刚性起落架、或弹性起落架、或轮式固定起落架、或轮式可折叠起落架、或水面浮力起落架、或滑橇式起落架、或液压式缓冲起落架。
28.与现有技术相比,本发明的有益效果是:
29.1、本发明方案1和3提供了两种无人遥控的多旋桨飞行器方案,为无人遥控多旋翼飞行的飞行载具提供了一种新方案;
30.2、本发明方案2和4提供了两种有人驾驶的多旋桨飞行器方案,为有人驾驶的多旋翼飞行的飞行载具提供了一种新方案;
31.3、本发明方案1-4中采用外缘环翼叶式螺旋桨来产生升力和飞行动力,利用外缘扁平环翼来切割和适应迎风快速层流或横风层流,使迎风或横风层流经外缘扁平环翼切割引流后,避免迎风或横风层流对环翼内侧桨叶产生直接气流冲击,特别有利于解决有横风条件下的飞行器悬停时在横风作用下容易偏离悬停位置的问题;
32.4、本发明方案1-4中采用外缘环翼叶式螺旋桨来产生升力和飞行动力,利用外缘扁平环翼来切割和适应迎风快速层流或横风层流,使迎风或横风层流经外缘扁平环翼切割引流后,避免桨叶与前进时的迎风快速层流的直接冲击,可以降低风阻进一步提高飞行速度;
33.5、本发明方案1-4中采用外缘环翼叶式螺旋桨来产生升力和飞行动力,利用外缘扁平环翼来切割和适应迎风快速层流或横风层流,避免环内桨叶翼尖产生激波震颤,能进一步提高飞行稳定性;
34.6、本发明方案1-4中采用外缘环翼叶式螺旋桨后,由于桨叶处于扁平外缘环翼的环内,桨叶不会直接外伸外露,所以不容易击打切割到手指,即使手指触摸到扁平外缘环翼,由于扁平外缘环翼的外边缘未开刃,所以碰触到手指或人体其他部位皮肤后产生的只是摩擦效果,相比普通叶式螺旋桨的撞击切割伤害,损伤更小更安全;
35.7、本发明方案1-4中采用外缘环翼叶式螺旋桨后,由于桨叶处于扁平外缘环翼的环内,桨叶不会直接外伸外露,所以飞行过程中不容易钩挂到树枝线缆等障碍物,有利于提高飞行安全性;
36.8、本发明方案1-4中采用外缘环翼叶式螺旋桨后,由于桨叶处于扁平外缘环翼的环内,其利用外缘扁平环翼来屏护环内桨叶,桨叶不会直接外伸外露,所以即使用户出于便于收纳的目的,取消安装桨叶防护圈,也仍具备安全性;
37.9、本发明方案3和4中采用舵机受控来拉动油门控制燃油发动机功率的方案,随机携带油料相比纯电力驱动方案,续航时间更长;
38.10、本发明方案采用采用降落伞,在飞行器处于高空停车的危险情况下,能够使用户及飞行器通过伞降避免坠毁,从而提高安全系数;
39.11、本发明方案采用燃油发电装置增程发电,能够解决飞行器飞行爬升耗电量大悬空能力不足的问题,能够保证飞行及陆行里程;
40.12、本发明方案采用云台、摄像装置也能够实现记录、拍摄、或辅助飞行器在飞行状态下实现无线遥控远端监视操作下的无人飞行,特别是本方案着重解决有横风环境下减轻飞行器悬停拍摄时的偏航问题,有利于提高飞行器悬停拍摄的稳定性。
附图说明
41.图1为本发明多旋桨飞行器的实施例1;
42.图2为本发明多旋桨飞行器的实施例2;
43.图3为本发明多旋桨飞行器的实施例3;
44.图4为本发明多旋桨飞行器的实施例4;
45.图5为本发明多旋桨飞行器实施例1的系统原理图;
46.图6为本发明多旋桨飞行器实施例2的系统原理图;
47.图7为本发明多旋桨飞行器实施例3的系统原理图;
48.图8为本发明多旋桨飞行器实施例4的系统原理图;
49.图9为本发明多旋翼飞行器的实施例5;
50.图10为本发明多旋翼飞行器的实施例6;
51.图11为本发明多旋翼飞行器的实施例7;
52.图12为本发明多旋翼飞行器的实施例8;
53.图13为本发明多旋翼飞行器的实施例9;
54.图14为外缘环翼叶式螺旋桨的单层结构样式图;
55.图15为外缘环翼叶式螺旋桨扁平外缘环翼直截面形状样式说明图;
56.图16为外缘环翼叶式螺旋桨扁平外缘环翼翼面导流结构样式说明图;
57.图17为外缘环翼叶式螺旋桨静止时被动切割气流以引流的侧视效果图;
58.图18为外缘环翼叶式螺旋桨转动时迎风切割气流以引流的侧视效果图;
59.图19为外缘环翼叶式螺旋桨静止时被动切割气流以引流的俯视效果图;
60.图20为外缘环翼叶式螺旋桨转动时迎风切割气流以引流的俯视效果图。
61.标号说明:
62.外缘环翼叶式螺旋桨1;电动机2;发动机21;舵机22;机身3;支撑臂30;起落架31;
驾驶舱32;电源及驱控单元4;电池单元41;驱动单元42;控制单元43;惯性测量单元5;通信收发单元6;无线遥控装置60;驾驶员操纵装置7;电子仪表装置71;摄像装置8;云台9;防护圈10;叶片式螺旋桨11;燃油发电装置40;卫星定位模块50;电子罗盘51;气压计52;扁平外缘环翼101;桨叶102;盘毂103;转轴104;导流凹槽111;导流凸台112;导流翼刀113;导流通孔114;降落伞300。
具体实施方式
63.下面结合附图对本发明实施例作进一步说明。
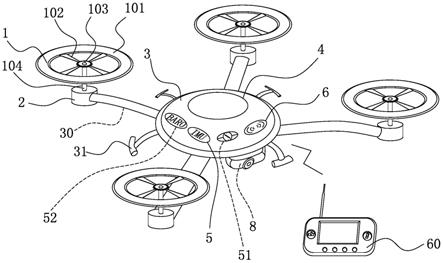
64.图1为本发明多旋桨飞行器的实施例1。如图所示,方案1:一种多旋桨飞行器,包括:四个外缘环翼叶式螺旋桨1、四个电动机2、机身3、起落架31、电源及驱控单元4、惯性测量单元5、通信收发单元6、无线遥控装置60;其中,所述外缘环翼叶式螺旋桨1又包括:扁平外缘环翼101、多个桨叶102、盘毂103、转轴104;此外,还包括了支撑臂30、摄像装置8、电子罗盘51、气压计52;
65.所述扁平外缘环翼101为扁平圆环结构,所述多个桨叶102均匀散布且连接于扁平外缘环翼101和盘毂103之间,转轴104连接固定盘毂103,由电动机2连接和驱动转轴104从而带动整个外缘环翼叶式螺旋桨1旋转;
66.所述机身3上通过四个支撑臂30均匀分布连接四个外缘环翼叶式螺旋桨1和四个电动机2,由四个电动机2分别驱动四个外缘环翼叶式螺旋桨1旋转产生升力和飞行动力;所述起落架31固定于机身3用于缓冲起降;所述惯性测量单元5和通信收发单元6固定于机身3;所述通信收发单元6与无线遥控装置60通过无线通信匹配连接;所述电子罗盘51和气压计52也固定于机身3;所述摄像装置8固定于机身3,摄像装置8用于记录、拍摄、本地存储图像或视频;或者,所述摄像装置8还通过通信收发单元6与无线遥控装置60实现无线图传,用于飞行器在遥控飞行模式下,实现无线遥控远端监视操作下的辅助飞行;
67.所述无线遥控装置60与通信收发单元6通过无线通信匹配连接,用户操作无线遥控装置60经通信收发单元6控制和调节电源及驱控单元4的运行参数、运行及输出功率,从而控制和调节四个电动机2和四个外缘环翼叶式螺旋桨1的转速,使飞行器实现加减速飞行、空中悬停、垂直起降;通过使四个外缘环翼叶式螺旋桨1相互之间产生转速差,实现飞行翻滚、飞行转向、俯仰飞行、偏航飞行;并且在快速平飞过程中,外缘环翼叶式螺旋桨1利用其外缘扁平环翼101来切割和适应迎风快速层流或横风层流,使迎风或横风层流经外缘扁平环翼101切割引流后,避免迎风或横风层流对环翼内侧桨叶102产生直接气流冲击,避免环内桨叶102翼尖产生激波震颤,避免或减轻这些原因带来的风阻较大、飞行不稳或悬停风吹偏航问题。
68.图2为本发明多旋桨飞行器的实施例2。如图所示,方案2:一种多旋桨飞行器,包括:四个外缘环翼叶式螺旋桨1、四个电动机2、机身3、起落架31、驾驶舱32、电源及驱控单元4、惯性测量单元5、驾驶员操纵装置7、电子仪表装置71;其中,所述外缘环翼叶式螺旋桨1又包括:扁平外缘环翼101、多个桨叶102、盘毂103、转轴104;此外,还包括了支撑臂30、燃油发电装置40;
69.所述扁平外缘环翼101为扁平圆环结构,所述多个桨叶102均匀散布且连接于扁平外缘环翼101和盘毂103之间,转轴104连接固定盘毂103,由电动机2连接和驱动转轴104从
而带动整个外缘环翼叶式螺旋桨1旋转;
70.所述机身3上通过四个支撑臂30均匀分布连接四个外缘环翼叶式螺旋桨1和四个电动机2,由四个电动机2分别驱动四个外缘环翼叶式螺旋桨1旋转产生升力和飞行动力;所述起落架31固定于机身3用于缓冲起降;所述驾驶舱32连接固定于机身3,驾驶舱32内设置有驾驶员操纵位;所述驾驶员操纵装置7设置于驾驶舱32内供驾驶员操纵驾驶;所述惯性测量单元5固定于机身3;电子仪表装置71固定于驾驶舱32内;电子仪表装置71检测及显示续航里程、飞行高度、飞行空速、爬升及下降速率、飞行姿态、飞行航向数据以及电动机2和电源及驱控装置4的运行数据参数和控制参数,为驾驶员提供数据参考辅助驾驶员驾驶飞行;所述燃油发电装置40固定安装于机身3;燃油发电装置40电连接于电源及驱控单元4中的电池单元41;燃油发电装置40主要由燃油引擎和发电机组成,通过燃烧所携带燃料,产生动力带动发电机发电,为电池单元41进行增程充电;具体的在本实施例中,由于飞行器需要载人飞行,因此不可避免地会因为重载工况大量消耗储存电力,所以增设燃油发电装置40可以很好地满足增程续航的需要;
71.驾驶员操作驾驶员操纵装置7控制和调节电源及驱控单元4的运行参数、运行及输出功率,从而控制和调节四个电动机2和四个外缘环翼叶式螺旋桨1的转速,使飞行器实现加减速飞行、空中悬停、垂直起降;通过使四个外缘环翼叶式螺旋桨1相互之间产生转速差,实现飞行翻滚、飞行转向、俯仰飞行、偏航飞行;并且在快速平飞过程中,外缘环翼叶式螺旋桨1利用其外缘扁平环翼101来切割和适应迎风快速层流或横风层流,使迎风或横风层流经外缘扁平环翼101切割引流后,避免迎风或横风层流对环翼内侧桨叶102产生直接气流冲击,避免环内桨叶102翼尖产生激波震颤,避免或减轻这些原因带来的风阻较大、飞行不稳或悬停风吹偏航问题。
72.图3为本发明多旋桨飞行器的实施例3。如图所示,方案3:一种多旋桨飞行器,包括:四个外缘环翼叶式螺旋桨1、四个发动机21、四个舵机22、机身3、起落架31、电源及驱控单元4、惯性测量单元5、通信收发单元6、无线遥控装置60;其中,所述外缘环翼叶式螺旋桨1又包括:扁平外缘环翼101、多个桨叶102、盘毂103、转轴104;此外,还包括了支撑臂30、摄像装置8、云台9、卫星定位模块50;具体的,图中卫星定位模块50以北斗导航定位系统的英文缩写bds作为符号表示;
73.所述扁平外缘环翼101为扁平圆环结构,所述多个桨叶102均匀散布且连接于扁平外缘环翼101和盘毂103之间,转轴104连接固定盘毂103,由发动机21连接和驱动转轴104从而带动整个外缘环翼叶式螺旋桨1旋转;
74.所述机身3上通过四个支撑臂30均匀分布连接四个外缘环翼叶式螺旋桨1和四个发动机21,由四个发动机21分别驱动多个外缘环翼叶式螺旋桨1旋转产生升力和飞行动力;所述四个舵机22各自对应连接一个发动机21,舵机22控制发动机21的油门拉动动作;所述起落架31固定于机身3用于缓冲起降;所述惯性测量单元5和通信收发单元6固定于机身3;所述通信收发单元6与无线遥控装置60通过无线通信匹配连接;所述摄像装置8设置于云台9上,云台9固定于机身3上,云台9为摄像装置8提供固定、支撑、安装位置,为摄像装置8提供增稳和防抖功能,以及调整摄像装置8水平和俯仰的拍摄角度;摄像装置8用于记录、拍摄、本地存储图像或视频;或者,所述摄像装置8还通过通信收发单元6与无线遥控装置60实现无线图传,用于飞行器在遥控飞行模式下,实现无线遥控远端监视操作下的辅助飞行;图
中,所述卫星定位模块50也固定于机身3上,其测得卫星定位数据后将卫星定位数据通过通信收发单元6无线发送至无线遥控装置60,用于飞行器在遥控飞行模式下,为用户提供数据参考辅助用户实现无线遥控飞行和便于丢失后定位找回;
75.所述无线遥控装置60与通信收发单元6通过无线通信匹配连接,用户操作无线遥控装置60经通信收发单元6控制和调节电源及驱控单元4的运行参数、运行及输出功率,最终通过调节各个舵机22拉动油门动作的力矩,从而控制和调节四个发动机21和四个外缘环翼叶式螺旋桨1的转速,使飞行器实现加减速飞行、空中悬停、垂直起降;通过使四个外缘环翼叶式螺旋桨1相互之间产生转速差,实现飞行翻滚、飞行转向、俯仰飞行、偏航飞行;并且在快速平飞过程中,外缘环翼叶式螺旋桨1利用其外缘扁平环翼101来切割和适应迎风快速层流或横风层流,使迎风或横风层流经外缘扁平环翼101切割引流后,避免迎风或横风层流对环翼内侧桨叶102产生直接气流冲击,避免环内桨叶102翼尖产生激波震颤,避免或减轻这些原因带来的风阻较大、飞行不稳或悬停风吹偏航问题。
76.图4为本发明多旋桨飞行器的实施例4。如图所示,方案4:一种多旋桨飞行器,包括:四个外缘环翼叶式螺旋桨1、四个发动机21、四个舵机22、机身3、起落架31、驾驶舱32、电源及驱控单元4、惯性测量单元5、驾驶员操纵装置7、电子仪表装置71;其中,所述外缘环翼叶式螺旋桨1又包括:扁平外缘环翼101、多个桨叶102、盘毂103、转轴104;此外,还包括了支撑臂30、卫星定位模块50;具体的,图中卫星定位模块50也以bds作为符号表示;
77.所述扁平外缘环翼101为扁平圆环结构,所述多个桨叶102均匀散布且连接于扁平外缘环翼101和盘毂103之间,转轴104连接固定盘毂103,由发动机21连接和驱动转轴104从而带动整个外缘环翼叶式螺旋桨1旋转;
78.所述机身3上通过四个支撑臂30均匀分布连接四个外缘环翼叶式螺旋桨1和四个发动机21,由四个发动机21分别驱动四个外缘环翼叶式螺旋桨1旋转产生升力和飞行动力;所述四个舵机22各自对应连接一个发动机21,舵机22控制发动机21的油门拉动动作;所述起落架31固定于机身3用于缓冲起降;所述驾驶舱32连接固定于机身3,驾驶舱32内设置有驾驶员操纵位;所述驾驶员操纵装置7设置于驾驶舱32内供驾驶员操纵驾驶;所述惯性测量单元5固定于机身3;电子仪表装置71固定于驾驶舱32内;电子仪表装置71检测及显示续航里程、飞行高度、飞行空速、爬升及下降速率、飞行姿态、飞行航向数据以及发动机21和电源及驱控装置4的运行数据参数和控制参数,为驾驶员提供数据参考辅助驾驶员驾驶飞行;图中,所述卫星定位模块50也固定于机身3上,其测得卫星定位数据为驾驶员提供数据参考辅助驾驶员实现导航飞行;
79.驾驶员操作驾驶员操纵装置7控制和调节电源及驱控单元4的运行参数、运行及输出功率,从而控制和调节各个舵机22拉动油门动作的力矩,进而控制和调节多个发动机21和多个外缘环翼叶式螺旋桨1的转速,使飞行器实现加减速飞行、空中悬停、垂直起降;通过使多个外缘环翼叶式螺旋桨1相互之间产生转速差,实现飞行翻滚、飞行转向、俯仰飞行、偏航飞行;并且在快速平飞过程中,外缘环翼叶式螺旋桨1利用其外缘扁平环翼101来切割和适应迎风快速层流或横风层流,使迎风或横风层流经外缘扁平环翼101切割引流后,避免迎风或横风层流对环翼内侧桨叶102产生直接气流冲击,避免环内桨叶102翼尖产生激波震颤,避免或减轻这些原因带来的风阻较大、飞行不稳或悬停风吹偏航问题。
80.图5为本发明多旋桨飞行器实施例1的系统原理图。如图所示,图中包括:四个外缘
环翼叶式螺旋桨1、四个电动机2、电源及驱控单元4、惯性测量单元5、通信收发单元6、无线遥控装置60;其中,所述电源及驱控单元4又包括:电池单元41、驱动单元42、控制单元43;此外,图中还包括了摄像装置8、电子罗盘51、气压计52;
81.所述电动机2、驱动单元42、控制单元43、惯性测量单元5、通信收发单元6电连接电池单元41;电池单元41在充蓄电后为整个飞行器的耗电单位供电、在电量不足时重新充电蓄能;所述驱动单元42又以不同输出通道电连接各个电动机2以输出功率驱动控制其运转;所述驱动单元42电连接于控制单元43,控制单元43参与对驱动单元42的功率输出控制和运行控制;惯性测量单元5电连接于控制单元43,惯性测量单元5测得飞行器的三维位置、三维速度、三维加速度、三轴角度、三维角速度、飞行方向、飞行高度数据并传至控制单元43,控制单元43根据这些飞行运动数据对当前飞行器姿态的控制参数进行解算、优化、误差补偿,并调整和优化对驱动单元42的功率输出控制;所述摄像装置8电连接于电源及驱控装置4由其供电和控制摄像装置8通电及拍摄动作;所述电子罗盘51电连接于控制单元43和电池单元41,其单独测得飞行方向数据并传至控制单元43,使惯性测量单元5中的飞行方向数据与其作参考校正;所述气压计52电连接于控制单元43和电池单元41,其单独测得飞行高度数据并传至控制单元43,使惯性测量单元5中的飞行高度数据与其作参考校正;所述通信收发单元6接收来自无线遥控装置60发出的操作动作指令和输入信号并传送给控制单元43;控制单元43通过通信收发单元6输出运行参数和控制参数给无线遥控装置60,为用户提供数据参考辅助用户实现无线遥控飞行。
82.图6为本发明多旋桨飞行器实施例2的系统原理图。如图所示,图中包括:四个外缘环翼叶式螺旋桨1、四个电动机2、电源及驱控单元4、惯性测量单元5、驾驶员操纵装置7、电子仪表装置71;其中,所述电源及驱控单元4又包括:电池单元41、驱动单元42、控制单元43;此外,图中还包括了燃油发电装置40;
83.所述电动机2、驱动单元42、控制单元43、惯性测量单元5、驾驶员操纵装置7电连接电池单元41;电池单元41在充蓄电后为整个飞行器的耗电单位供电、在电量不足时重新充电蓄能;所述驱动单元42又以不同输出通道电连接各个电动机2以输出功率驱动控制其运转;所述驱动单元42电连接于控制单元43,控制单元43参与对驱动单元42的功率输出控制和运行控制;惯性测量单元5电连接于控制单元43,惯性测量单元5测得飞行器的三维位置、三维速度、三维加速度、三轴角度、三维角速度、飞行方向、飞行高度数据并传至控制单元43,控制单元43根据这些飞行运动数据对当前飞行器姿态的控制参数进行解算、优化、误差补偿,并调整和优化对驱动单元42的功率输出控制;驾驶员操作驾驶员操纵装置7发出操作动作指令和输入信号并传送给控制单元43;控制单元43根据操作动作指令控制驱动单元42调节对多个电动机2的功率输出控制以实现对飞行器飞行动作的控制;控制单元43输出运行参数和控制参数给电子仪表装置71,为驾驶员提供数据参考辅助驾驶员驾驶飞行;在本图中,所述燃油发电装置40电连接于电源及驱控单元4中的电池单元41和控制单元43;燃油发电装置40主要由燃油引擎和发电机组成,通过燃烧所携带燃料,产生动力带动发电机发电,为电源及驱控单元4中的电池单元41进行增程充电;根据需要驾驶员还可以通过驾驶员操纵装置7对控制单元43发出启动指令,来启动燃油发电装置40;或者,驾驶员可以手动直接启动燃油发电装置40对电池单元41进行充电。
84.图7为本发明多旋桨飞行器实施例3的系统原理图。如图所示,图中包括:四个外缘
环翼叶式螺旋桨1、四个发动机21、四个舵机22、电源及驱控单元4、惯性测量单元5、通信收发单元6、无线遥控装置60;其中,所述电源及驱控单元4又包括:电池单元41、驱动单元42、控制单元43;此外,图中还包括了摄像装置8、云台9、卫星定位模块50;
85.所述舵机22、驱动单元42、控制单元43、惯性测量单元5、通信收发单元6电连接电池单元41;电池单元41在充蓄电后为整个飞行器的耗电单位供电、在电量不足时重新充电蓄能;所述驱动单元42又以不同输出通道电连接各个舵机22以输出功率驱动控制其运转和执行动作;所述驱动单元42电连接于控制单元43,控制单元43参与对驱动单元42的功率输出控制和运行控制;惯性测量单元5电连接于控制单元43,惯性测量单元5测得飞行器的三维位置、三维速度、三维加速度、三轴角度、三维角速度、飞行方向、飞行高度数据并传至控制单元43,控制单元43根据这些飞行运动数据对当前飞行器姿态的控制参数进行解算、优化、误差补偿,并调整和优化对驱动单元42的功率输出控制,通过调节各个舵机22拉动油门动作的力矩,来控制各个发动机21的输出功率,以调整各个外缘环翼叶式螺旋桨1的转速;所述通信收发单元6接收来自无线遥控装置60发出的操作动作指令和输入信号并传送给控制单元43;控制单元43通过通信收发单元6输出运行参数和控制参数给无线遥控装置60,为用户提供数据参考辅助用户实现无线遥控飞行;此外,图中摄像装置8电连接于电源及驱控装置4中的电池单元41和控制单元43,由电池单元41为摄像装置8供电,由控制单元43控制摄像装置8通电及拍摄动作,摄像装置8用于记录、拍摄、本地存储图像或视频;或者,所述摄像装置8还通过通信收发单元6与无线遥控装置60实现无线图传,用于飞行器在遥控飞行模式下,实现无线遥控远端监视操作下的辅助飞行;所述卫星定位模块50电连接于控制单元43和电池单元41,由电池单元41为卫星定位模块50供电,控制单元43将卫星定位数据通过通信收发单元6无线发送至无线遥控装置60,用于飞行器在遥控飞行模式下,为用户提供数据参考辅助用户实现无线遥控飞行和便于丢失后定位找回。
86.图8为本发明多旋桨飞行器实施例4的系统原理图。如图所示,图中包括:四个外缘环翼叶式螺旋桨1、四个发动机21、四个舵机22、电源及驱控单元4、惯性测量单元5、驾驶员操纵装置7、电子仪表装置71;其中,所述电源及驱控单元4又包括:电池单元41、驱动单元42、控制单元43;此外,图中还包括了卫星定位模块50;
87.所述舵机22、驱动单元42、控制单元43、惯性测量单元5、驾驶员操纵装置7电连接电池单元41;电池单元41在充蓄电后为整个飞行器的耗电单位供电、在电量不足时重新充电蓄能;所述驱动单元42又以不同输出通道电连接各个舵机22以输出功率驱动控制其运转和执行动作;所述驱动单元42电连接于控制单元43,控制单元43参与对驱动单元42的功率输出控制和运行控制;惯性测量单元5电连接于控制单元43,惯性测量单元5测得飞行器的三维位置、三维速度、三维加速度、三轴角度、三维角速度、飞行方向、飞行高度数据并传至控制单元43,控制单元43根据这些飞行运动数据对当前飞行器姿态的控制参数进行解算、优化、误差补偿,并调整和优化对驱动单元42的功率输出控制,通过调节各个舵机22拉动油门动作的力矩,来控制各个发动机21的输出功率,以调整各个外缘环翼叶式螺旋桨1的转速;驾驶员操作驾驶员操纵装置7发出操作动作指令和输入信号并传送给控制单元43;控制单元43根据操作动作指令控制驱动单元42调节对各个舵机22的输出功率,来调整各个舵机22拉动发动机21油门的力矩,来控制各个发动机21的输出功率,从而调整各个外缘环翼叶式螺旋桨1的转速,以实现对飞行器飞行动作的控制;控制单元43输出运行参数和控制参数
给电子仪表装置71,为驾驶员提供数据参考辅助驾驶员驾驶飞行;图中,所述卫星定位模块50电连接于控制单元43和电池单元41,由电池单元41为卫星定位模块50供电,其测得卫星定位数据为驾驶员提供数据参考辅助驾驶员实现导航飞行。
88.图9为本发明多旋桨飞行器的实施例5。如图所示,本实施例中的多旋桨飞行器的机身3上通过六个支撑臂30均匀分布连接六个外缘环翼叶式螺旋桨1和六个电动机2,由六个电动机2分别驱动六个外缘环翼叶式螺旋桨1旋转产生升力和飞行动力。
89.图10为本发明多旋桨飞行器的实施例6。如图所示,本实施例中的多旋桨飞行器采用的是外缘环翼叶式螺旋桨1和叶片式螺旋桨11混用的方案。所述机身3上通过四个支撑臂30均匀分布连接两个外缘环翼叶式螺旋桨1和两个电动机2,以及连接两个叶片式螺旋桨11和两个电动机2;由四个电动机2分别驱动两个叶片式螺旋桨11和两个叶片式螺旋桨11旋转产生升力和飞行动力。此外,图中还采用了两个防护圈10,其连接于支撑臂30,屏护于叶片式螺旋桨11的外围,以防止桨叶伤人或缓冲飞行冲撞。
90.图11为本发明多旋桨飞行器的实施例7。如图所示,本实施例采用的是四臂共轴八电机八旋桨方案。其包括:八个外缘环翼叶式螺旋桨1、八个电动机2、机身3、起落架31、电源及驱控单元4、惯性测量单元5、通信收发单元6、无线遥控装置60、四个支撑臂30;
91.所述机身3上通过四个支撑臂30均匀分布连接四组外缘环翼叶式螺旋桨1和电动机2,其中两个外缘环翼叶式螺旋桨1和两个电动机2为一组,这两个电动机2反向对置共轴背靠背连接后固定后,各自驱动一个外缘环翼叶式螺旋桨1旋转。由八个电动机2分别驱动八个外缘环翼叶式螺旋桨1旋转产生升力和飞行动力。
92.图12为本发明多旋桨飞行器的实施例8。如图所示,本实施例采用的是四臂共轴八电机八旋桨方案。其包括:八个外缘环翼叶式螺旋桨1、四个电动机2、机身3、起落架31、电源及驱控单元4、惯性测量单元5、通信收发单元6、无线遥控装置60、四个支撑臂30;
93.所述机身3上通过四个支撑臂30均匀分布连接四组外缘环翼叶式螺旋桨1和电动机2,其中两个外缘环翼叶式螺旋桨1和一个电动机2为一组,这个电动机2通过贯穿轴以一驱二的方式共轴驱动两个外缘环翼叶式螺旋桨1旋转。由四个电动机2分别驱动八个外缘环翼叶式螺旋桨1旋转产生升力和飞行动力。
94.图13为本发明多旋桨飞行器的实施例9。如图所示,本实施例中采用了降落伞300;所述降落伞300的安全绳连接于机身3;在飞行器处于高空停车的危险情况下,用户操作释放、打开降落伞300,使飞行器通过伞降避免坠毁,从而提高安全系数。特别是对于有人驾驶的多旋桨飞行器,能够通过伞降保障人身安全。
95.图14为外缘环翼叶式螺旋桨的单层结构样式图1。本图所展示的是四桨叶、单层的外缘环翼叶式螺旋桨。如图所示,所述扁平外缘环翼101为扁平圆环结构,四个桨叶102均匀散布且连接于扁平外缘环翼101和盘毂103之间,转轴104连接固定盘毂103;外部动力机构通过连接和驱动转轴104从而带动整个外缘环翼叶式螺旋桨1旋转。同理,外缘环翼叶式螺旋桨1每层的桨叶数量桨叶数量还可以为两叶、或三叶、或多叶。
96.图15为外缘环翼叶式螺旋桨扁平外缘环翼直截面形状样式说明图。如图所示,所述外缘环翼叶式螺旋桨1中扁平外缘环翼101的直截面形状为平板翼型、或平凸翼型、或双凸翼型、或凹凸翼型、或扁三角翼型;并且所述外缘环翼叶式螺旋桨1中扁平外缘环翼101的扁平翼面的表面是平滑的。
97.图16为外缘环翼叶式螺旋桨扁平外缘环翼翼面导流结构样式说明图。如图所示,在本图中,所述外缘环翼叶式螺旋桨1中扁平外缘环翼101的扁平翼面的表面上设置有散射状的导流凹槽111、或散射状的导流凸台112、或散射状的导流翼刀113,或散射状的导流通孔114,以进一步减弱在飞行器平飞和桨叶102旋转时迎面高速冲击气流对桨叶102升力气流的干扰冲击,增强外缘扁平环翼101对迎风层流或横风层流的切割引流效果。
98.同理,所述外缘环翼叶式螺旋桨1中扁平外缘环翼101的扁平翼面的表面上还可以设置有整环同心圆连续式的导流凹槽111、或导流凸台112、或导流翼刀113;整环同心圆断续式的导流凹槽111、或导流凸台112、或导流翼刀113、或导流通孔114。其作用也是进一步减弱在飞行器平飞和桨叶102旋转时迎面高速冲击气流对桨叶102升力气流的干扰冲击,增强外缘扁平环翼101对迎风层流或横风层流的切割引流效果。
99.图17为外缘环翼叶式螺旋桨静止时被动切割气流以引流的侧视效果图。如图所示,在本图中,所述外缘环翼叶式螺旋桨1在停止转动时,在迎击高速气流时,可以借助其扁平外缘环翼101迎风侧的翼面圆弧边缘来破割或切割气流,使之从扁平外缘环翼101的上方、下方和两侧通过,以避免来袭层流直接冲击桨叶102和盘毂103造成更多紊乱气流。当然,迎风高速层流在避开直接冲击桨叶102和盘毂103的情况下,依旧会存在少许紊流,这是无法完全避免的,但是强干扰乱流已经大大减弱的情况下,飞行器的飞行稳定性已经能够得到极大提高。
100.而与之相比,普通的叶式螺旋桨在静止时迎击高速气流时,桨叶和盘毂会直接面临高速层流的强力冲击,所造成的强干扰乱流无法得到减弱,最终只能由飞行器的安定舵面系统来分担承受,因此对飞行稳定性和安全性极为不利。
101.图18为外缘环翼叶式螺旋桨转动时迎风切割气流以引流的侧视效果图。如图所示,在本图中,所述外缘环翼叶式螺旋桨1在转动时,在迎击高速气流时,可以借助其扁平外缘环翼101迎风侧的翼面圆弧边缘来转动切割气流,使之从扁平外缘环翼101的上方、下方通过,此外,由于扁平外缘环翼101的翼面旋转摩擦气流带动附面层气流和层流偏离直接迎向,使迎风侧正中的一部分气流受扁平外缘环翼101转动摩擦的影响,在迎风时向左侧偏离;而右侧迎向气流受扁平外缘环翼101转动摩擦的影响和右边外侧正常气流的共同作用,会产生一部分涡流;这种情况下,来袭层流也能够避免直接冲击桨叶102和盘毂103,从而减少紊乱气流的产生,因此依旧有利于提高飞行器的飞行稳定性和安全性。
102.图19为外缘环翼叶式螺旋桨静止时被动切割气流以引流的俯视效果图。本图对应为图17的俯视图。从图中可以看出,所述外缘环翼叶式螺旋桨1在停止转动时,在迎击高速气流时,可以借助其扁平外缘环翼101迎风侧的翼面圆弧边缘来破割或切割气流,使之从扁平外缘环翼101的上方、下方和两侧通过,但是从上方、下方通过的气流受桨叶叶扇斜面的影响,并非平直通过,而是产生一定的气流偏向,但是其依旧能够避免来袭层流直接冲击桨叶102和盘毂103,并不过多造成紊乱气流。相比普通的叶式螺旋桨,非常有利于提高飞行器的飞行稳定性和安全性。
103.图20为外缘环翼叶式螺旋桨转动时迎风切割气流以引流的俯视效果图。本图对应为图18的俯视图。如图所示,在本图中,能够比较具体体现,由于扁平外缘环翼101的翼面旋转摩擦气流带动附面层气流和层流偏离直接迎向,使迎风侧正中的一部分气流受扁平外缘环翼101转动摩擦的影响,在迎风时向左侧偏离;而右侧迎向气流受扁平外缘环翼101转动
摩擦的影响和右边外侧正常气流的共同作用,会产生一部分涡流;这种情况下,来袭层流也能够避免直接冲击桨叶102和盘毂103,从而减少紊乱气流的产生,因此依旧有利于提高飞行器的飞行稳定性和安全性。
104.以上的实施例仅仅是对本发明的优选实施方式进行描述,并非对本发明的范围进行限定,在不脱离本发明设计精神的前提下,本领域普通技术人员对本发明的技术方案作出的各种变形和改进,均应落入本发明权利要求书确定的保护范围内。