1.本发明涉及民用飞机制动领域,具体是一种飞机自动刹车的控制方法及系统。
背景技术:
2.飞机刹车系统在飞机起飞、着陆过程中起着至关重要的影响,其主要作用是将飞机动能转换为热能,使飞机速度降低。自动刹车系统作为刹车系统组成的一部分,广泛的应用于国外民用飞机,减轻了飞行员的工作负担,提高乘客的舒适性,提升飞机起飞和着陆阶段的安全性。为保障军、民机能够使用该项技术,国内对于该项技术仍需进行深度研究,构建完善的自动刹车逻辑以及控制律。
3.公开号cn108099874a的发明中公开了一种由自动刹车选择开关直接控制的飞机自动刹车系统,该发明通过第一自动刹车选择开关与第二自动刹车选择开关控制电液伺服阀实施自动刹车控制。但是该发明是通过操纵两个自动刹车选择开关输出不同刹车压力实现自动刹车,通过增加开关数量以及液压阀实现了两个刹车压力的控制,操纵较多,而且没有自动刹车选择开关的锁位判断,在不具备自动刹车条件时进行自动刹车,或者造成自动刹车非指令激活的结果,并且该方法中没有给出具体的控制方法。
4.公开号cn108100241a的发明中公开了一种可自动刹车的飞机电传刹车系统及刹车方法,该发明通过操纵自动刹车选择开关控制液电阀实施自动刹车,但是该发明是通过操纵自动刹车选择开关输出最大刹车压力,并没有不同档位的选择,并且该方法中没有给出具体的控制方法。
技术实现要素:
5.为克服现有技术中存在的对自动刹车选择开关的锁位逻辑简单,容易产生误锁位或者是不锁位的情况,当发生不锁位情况不能精确定位到自动刹车选择开关故障以及自动刹车非指令激活实施自动刹车的工况,本发明提出了一种飞机自动刹车的控制系统及控制方法。
6.本发明提出的飞机自动刹车的控制系统包括切断阀、伺服阀、压力传感器、速度传感器。所述切断阀的液压输出端分别与伺服阀的液压输入端端联通,为该伺服阀提供液压。所述切断阀的液压输出端伺服阀的液压输入端联通,为该伺服阀提供液压。该伺服阀的液压输出端与机轮通过液压管路联通,为该机轮提供液压;所述压力传感器的液压输入端与伺服阀至机轮之间的液压管路联通,用于检测该机轮的实际刹车压力。所述切断阀包括内侧切断阀和外侧切断阀;所述伺服阀包括左外伺服阀、左内伺服阀、右内伺服阀和右外伺服阀;所述压力传感器包括左外压力传感器、左内压力传感器、右内压力传感器和右外压力传感器;所述机轮包括左外机轮、左内机轮、右内机轮和右外机轮;所述速度传感器包括左外速度传感器、左内速度传感器、右内速度传感器和右外速度传感器。
7.其特征在于,还包括自动刹车选择开关和刹车控制器;其中:所述刹车控制器的电信号输入端分别与自动刹车选择开关的输出端、左外速度传感器的输出端、左内速度传感
器的输出端、右内速度传感器的输出端、右外速度传感器的输出端、左外压力传感器的输出端、左内压力传感器的输出端、右内压力传感器的输出端、右外压力传感器的输出端电气连接,分别接收自动刹车选择开关提供的挡位信号、各速度传感器提供的机轮速度信号和各压力传感器提供的实际刹车压力信号。
8.所述该刹车控制器的电信号输出端分别与自动刹车选择开关的输入端、内侧切断阀的输入端、外侧切断阀的输入端、左外伺服阀的输入端、左内伺服阀的输入端、右内伺服阀的输入端、右外伺服阀的输入端电气连接,向该自动刹车选择开关提供锁位电压、向该切断阀提供控制电压、向该伺服阀提供控制电流。
9.所述自动刹车选择开关包含编码模块和锁位模块。所述编码模块的输出端与刹车控制器的输入端联通,通过该编码模块将飞行员选择的自动刹车选择开的挡位通过二进制编码的形式分别发送至第一控制板和第二控制板。所述锁位模块的输入端和该刹车控制器的输出端联通,通过刹车控制器为该锁位模块提供锁位电压;锁位模块的输出端与该刹车控制器的输入端联通,通过该刹车控制器检测锁位模块的电压和电流。
10.所述刹车控制器包含第一控制板和第二控制板。该第一控制板和第二控制板之间通过rs 422联通。所述第一控制板包括检测模块、第一采集模块、第一控制模块;第二控制板包括第二控制模块和第二采集模块。通过所述第一控制板控制内侧切断阀、左内伺服阀和右内伺服阀;通过所述第二控制板控制外侧切断阀、左外伺服阀和右外伺服阀。
11.所述检测模块包含开关模块、过流检测模块、电流检测模块和电压值回采模块。该开关模块的输入端和第一控制模块的输出端联通,通过该第一控制模块为该开关模块提供控制指令;该开关模块的输出端和锁位模块的输入端联通,通过该开关模块为该锁位模块提供电压。所述电压值回采模块的输入端与该锁位模块的第一输出端联通,以检测该锁位模块的电压;电压值回采模块的输出端与第一控制模块的第一输入端联通,为该第一控制模块提供锁位模块的电压。所述电流检测模块的输入端口与所述锁位模块的第二输出端口联通,采集该锁位模块的电流。所述电流检测模块的第一输出端口与第一控制模块的第二输入端口联通,为该第一控制模块提供检测电流。所述过流检测模块的输入端与电流检测模块的第二输出端联通,为该过流检测模块提供电流值;过流检测模块的输出端和第一控制模块的第三输入端口联通,为该第一控制模块提供自动刹车选择开关是否过流故障。
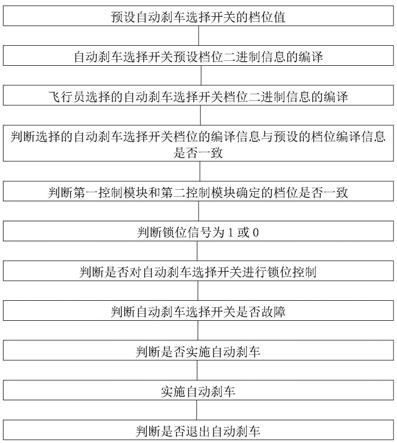
12.本发明提出的利用所述控制系统进行刹车控制具体过程是:
13.步骤一,预设自动刹车选择开关的档位值
14.自动刹车选择开关为飞机起飞过程用于中止起飞的中止起飞挡位、关闭时的off挡位、以及飞机着陆过程用于着陆刹车的高、中、低三个档位。通过第一控制模块与第二控制模块预设对所述中止起飞挡位、关闭时的off挡位、以及着陆时的高、中、低三个档位的档位值,每一个档位预设一个值,并对所设置的值进行二进制编译,形成四位二进制的编译值。所述预设的着陆时高档位值、着陆时中档位值、off档位值、着陆时低档位值和中止起飞档位值依次分别是3、5、6、9和10。
15.步骤二,自动刹车选择开关预设档位二进制信息的编译:
16.通过二进制编译,使预设的各档位值分别形成对应的4位二进制信息0011、0101、1001、0110和1010,并且该0011、0101、1001、0110和1010分别对应着陆时高档位值3、着陆时中档位值5、预设off档位值6、着陆时低档位值9和中止起飞档位值10。
17.步骤三,飞行员选择的自动刹车选择开关档位二进制信息的编译:
18.飞行员根据飞机状态选择自动刹车选择开关的档位:在飞机起飞过程中飞行员选择中止起飞档对飞机实施刹车时,或者在飞机着陆过程中飞行员根据跑道状态选择着陆时的高档或中档或低档时,自动刹车选择开关通过所述编码器模块将所选择的档位编译为4个离散信号;所述4个离散型号分别为第一离散信号、第二离散信号、第三离散信号和第四离散信号。
19.将所选择档位的4个离散信号同时分别发送至第一采集模块和第二采集模块。
20.第一控制模块将接收到的4个离散信号,按照第一离散信号、第二离散信号、第三离散信号、第四离散信号的顺序进行组合,形成飞行员选择的自动刹车选择开关档位四位二进制信息。
21.第二控制模块将接收到的4个离散信号,按照第一离散信号、第二离散信号、第三离散信号、第四离散信号顺序进行组合,形成飞行员选择的自动刹车选择开关档位四位二进制信息。
22.当飞行员选择的自动刹车选择开关的档位为着陆时的高档位时,若自动刹车选择开关正常,编码模块编译的4个离散信号第一离散信号为0、第二离散信号为0、第三离散信号为1和第四离散信号1;若自动刹车选择开关为故障,编码模块编译的4个离散信号可能为非0011的任一组合。
23.当飞行员选择的自动刹车选择开关的档位为着陆时的中档位时,若自动刹车选择开关正常,编码模块编译的4个离散信号第一离散信号为0、第二离散信号为1、第三离散信号为0和第四离散信号1;若自动刹车选择开关为故障,编码模块编译的4个离散信号可能为非0101的任一组合。
24.当飞行员选择的自动刹车选择开关的档位为着陆时的低档位时,若自动刹车选择开关正常,编码模块编译的4个离散信号第一离散信号为1、第二离散信号为0、第三离散信号为0和第四离散信号1;若自动刹车选择开关为故障,编码模块编译的4个离散信号可能为非1001的任一组合。
25.当飞行员选择的自动刹车选择开关的档位为off档位时,若自动刹车选择开关正常,编码模块编译的4个离散信号第一离散信号为0、第二离散信号为1、第三离散信号为1和第四离散信号0;若自动刹车选择开关为故障,编码模块编译的4个离散信号可能为非0110的任一组合。
26.当飞行员选择的自动刹车选择开关的档位为起飞时的中止起飞档位时,若自动刹车选择开关正常,编码模块编译的4个离散信号第一离散信号为1、第二离散信号为0、第三离散信号为1和第四离散信号0;若自动刹车选择开关为故障,编码模块编译的4个离散信号可能为非1010的任一组合;
27.步骤四,判断选择的自动刹车选择开关档位的编译信息与预设的档位编译信息是否一致:
28.分别通过第一控制模块和第二控制模块将步骤三中得到飞行员选择的自动刹车选择开关档位四位二进制信息与表1中预设的档位值进行比较,以确定自动刹车选择开关档位。
29.第一控制模块确定自动刹车选择开关档位的具体过程是:
[0030]ⅰ在着陆时:
[0031]
若选择off档位,且该off档位的档位值与预设的off档位的档位值0110相同,则确定选择的自动刹车选择开关为off档;如果不同,则确定为故障。
[0032]
若选择高档位,且该高档位的档位值与预设的高档位的档位值0011相同,则确定选择的自动刹车选择开关为高档;如果不同,则确定为故障。
[0033]
若选择中档位,且该中档位的档位值与预设的中档位的档位值0101相同,则确定选择的自动刹车选择开关为中档;如果不同,则确定为故障。
[0034]
若选择低档位,且该低档位的档位值与预设的低档位的档位值1001相同,则确定选择的自动刹车选择开关为低档;如果不同,则确定为故障。
[0035]ⅱ在起飞时:
[0036]
若选择off档位,且该off档位的档位值与预设的off档位的档位值0110相同,则确定选择的自动刹车选择开关为off档;如果不同,则确定为故障。
[0037]
若选择中止起飞档位,且该中止起飞档位的档位值与预设的中止起飞档位的档位值1010相同,则确定选择的自动刹车选择开关为中止起飞档;如果不同,则确定为故障。
[0038]
完成第一控制控模块对自动刹车选择开关档位的确定。
[0039]
第二控制模块确定自动刹车选择开关档位的具体过程是:
[0040]ⅰ在着陆时:
[0041]
若选择off档位,且该off档位的档位值与预设的off档位的档位值0110相同,则确定选择的自动刹车选择开关为off档;如果不同,则确定为故障。
[0042]
若选择高档位,且该高档位的档位值与预设的高档位的档位值0011相同,则确定选择的自动刹车选择开关为高档;如果不同,则确定为故障。
[0043]
若选择中档位,且该中档位的档位值与预设的中档位的档位值0101相同,则确定选择的自动刹车选择开关为中档;如果不同,则确定为故障。
[0044]
若选择低档位,且该低档位的档位值与预设的低档位的档位值1001相同,则确定选择的自动刹车选择开关为低档;如果不同,则确定为故障。
[0045]ⅱ在起飞时:
[0046]
若选择off档位,且该off档位的档位值与预设的off档位的档位值0110相同,则确定选择的自动刹车选择开关为off档;如果不同,则确定为故障。
[0047]
若选择中止起飞档位,且该中止起飞档位的档位值与预设的中止起飞档位的档位值1010相同,则确定选择的自动刹车选择开关为中止起飞档;如果不同,则确定为故障。
[0048]
完成第二控制模块对自动刹车选择开关档位的确定。
[0049]
步骤五、判断第一控制模块和第二控制模块确定的档位是否一致:
[0050]
第二控制模块将确定的自动刹车选择开关档位发送到第一控制模块。将第二控制模块确定的自动刹车选择开关档位与所述第一控制模块确定的自动刹车选择开关档位进行比较;若比较的结果相同,进入步骤六;若比较的结果不相同,第一控制模块控制检测模块开关打开,对自动刹车选择开关进行解除锁位控制,并发送自动刹车故障。
[0051]
步骤六,判断锁位信号为1或0:
[0052]
刹车控制器接收轮载信号、指令传感器检测的脚蹬位置信号和速度传感器检测的机轮速度信号。
[0053]
当第一控制模块确定的档位为着陆时的高、中、低档中的任一档位时,如果轮载信号指示在空中,且脚蹬位置信号小于等于着陆脚蹬位置超控阈值时,第一控制模块设置锁位信息为1;反之,第一控制模块设置锁位信息为0。
[0054]
当第一控制模块确定的挡位为中止起飞挡位时,如果轮载信号指示在地面,且脚蹬位置信号小于等于中止起飞脚蹬位置超控阈值,且机轮速度信号小于等于中止起飞速度阈值时,第一控制模块设置锁位信息为1;反之,该第一控制模块设置锁位信息为0。
[0055]
当第二控制模块确定的档位为着陆时的高、中、低档位中的任一档位时,如果轮载信号指示在空中,且脚蹬位置信号小于等于着陆脚蹬位置超控阈值时,该第二控制模块设置锁位信息为1;反之,第二控制模块设置锁位信息为0。
[0056]
当第二控制模块确定的挡位为中止起飞挡位时,如果轮载信号指示在地面,且脚蹬位置信号小于等于中止起飞脚蹬位置超控阈值、机轮速度信号小于等于中止起飞速度阈值时,第二控制模块设置锁位信息为1,反之,第二控制模块设置锁位信息为0。
[0057]
步骤七,判断是否对自动刹车选择开关进行锁位控制:
[0058]
所述第一控制模块接收第二控模块的锁位信息。当该第一控制模块和第二控制模块的锁位信息均为1时,则第一控制模块控制检测模块开关关闭,向自动刹车选择开关提供28v电压,对自动刹车选择开关进行锁位控制;反之,则第一控制模块控制检测模块开关打开,对自动刹车选择开关进行解除锁位控制。
[0059]
步骤八、判断自动刹车选择开关是否故障:
[0060]
当所述第一控制模块对自动刹车选择开关进行锁位控制时,电流检测模块检测到的电流应为i
a
±
δi,电压值回采模块检测到的电压应为v
a
。当该第一控制模块对自动刹车选择开关进行解除锁位控制时,电流检测模块检测到的电流应为0,电压值回采模块检测到的电压应为0。
[0061]
当所述第一控制模块对自动刹车选择开关进行锁位控制时,如果电流检测模块检测到的电流为0,电压值回采模块检测到的电压为0,则判定为检测模块的开关打开失败;当第一控制模块对自动刹车选择开关进行解除锁位控制时,如果电流检测模块检测到的电流值为i
a
±
δi,电压值回采模块检测到的电压为v
a
,则判定为检测模块的开关关闭失败;如果电流检测模块检测到的电流为0,电压值回采模块检测到的电压为v
a
,则判定为自动刹车选择开关为开路故障;如果过流检测模块检测到电流大于等于i
o
,则判定位自动刹车选择开关为短路故障。
[0062]
其中,i
a
为自动刹车选择开关锁位所需电流,δi为自动刹车选择开关锁位所需电流的容差,v
a
为自动刹车选择开关锁位所需电压,i
o
为过流门限值。
[0063]
当检测模块判断自动刹车选择开关故障时,刹车控制器发送自动刹车故障;反之,根据步骤九,刹车控制器判断是否实施自动刹车。
[0064]
步骤九、判断是否实施自动刹车:
[0065]
当自动刹车选择开关的档位为着陆时的高档、中档或低档中的任一档位时,刹车控制器接收轮载信号,当轮载信号指示在地面并持续时间t1后,实施着陆自动刹车。
[0066]
当自动刹车选择开关的挡位为中止起飞挡位时,刹车控制器接收油门杆信号,当油门杆信号指示在慢车位时,实施中止起飞。
[0067]
步骤十、实施自动刹车:
[0068]
着陆时,所述着陆时的高、中、低挡位分别对应一个预设的减速度a
p
。当实施着陆自动刹车时,刹车控制器接收飞机加速度a
t
,通过飞机加速度与预设的减速度的差值进行pid控制计算刹车压力p
t
。
[0069]
p
t
=(a
p
‑
a
t
)
×
pid
[0070]
式中,a
p
为着陆时的挡位对应的预设减速度,a
t
为飞机加速度,p
t
为刹车压力。
[0071]
当实施中止起飞时,输出刹车压力p
t
=p
max
。
[0072]
其中,p
max
为机轮刹车系统最大刹车压力。
[0073]
步骤十一,判断是否退出自动刹车:
[0074]
在判断是否退出自动刹车时,当机轮速度小于等于退出自动刹车速度阈值,或者脚蹬位置大于等于脚蹬位置超控阈值,或者检测到自动刹车选择开关为off挡位时,刹车控制器退出自动刹车,第一控制模块自动刹车选择开关进行解除锁位控制,使自动刹车选择开关回复到off挡位。
[0075]
至此,完成了对飞机的自动刹车控制。
[0076]
与现有技术相比较,本发明具有以下优点:
[0077]
本技术中提供的刹车控制器包括第一控制板及第二控制板,其中:第一控制板检测其控制通道中接收的信号的故障,以及各信号的状态;第二控制板检测其控制通道中的信号的故障以及各信号的装填。所述第一控制板和第二控制板分别接收自动刹车选择开关选定档位,并将选定的档位进行编译转换成二进制码,用于后续的信息传递以及逻辑判断中,控制更加方便。第一控制板和第二控制板判断编译后的二进制码与预设值是否一致,从而在初期发现故障避免错误判断;第一控制板和第二控制板分别检测其控制通道内部是否故障以及接收的信息是否故障,判断是否确认锁位;当第一控制板接收到第二控制板的确认锁位信号后,且通过检测模块没有发现其电流值以及电压值故障,则控制开关关闭提供锁位电压,使自动刹车选择开关锁位。刹车控制器通过接收油门杆等信号判断是否实施自动刹车,根据不同的工况,实施恒减速率刹车,减轻了飞行员的负担,且在中止起飞时刹车距离减短了约10%,且避免了自动刹车造成的非指令刹车。
附图说明
[0078]
图1为本发明的结构示意图。
[0079]
图2为自动刹车选择开关和刹车控制器结构示意图。
[0080]
图3为检测模块的示意图。
[0081]
图4为本发明的流程图
[0082]
图5为第一控制板的控制流程图。
[0083]
图6为第二控制板的控制流程图。
[0084]
图中:1.外侧切断阀;2.右外伺服阀;3.自动刹车选择开关;4.刹车控制器;5.右外压力传感器;6.右外速度传感器;7.右外机轮;8.左外机轮;9.左外速度传感器;10.左外压力传感器;11.左外伺服阀;12.右内速度传感器;13.右内机轮;14.右内压力传感器;15.右内伺服阀;16.左内伺服阀;17.左内机轮;18.左内速度传感器;19.左内压力传感器;20.内侧切断阀;21.编码模块;22.锁位模块;23.第二控制板;24.第二控制模块;25.第二采集模块;26.第一控制板;27.第一控制模块;28.检测模块;29.第一采集模块;30.开关模块;31.
过流检测模块;32.电流检测模块;33.电压值回采模块。
具体实施方式
[0085]
实施例一
[0086]
所述自动刹车控制系统包括自动刹车切断阀、伺服阀、压力传感器、速度传感器。所述切断阀的液压输出端分别与伺服阀的液压输入端端联通,为该伺服阀提供液压。
[0087]
所述切断阀的液压输出端伺服阀的液压输入端联通,为该伺服阀提供液压。该伺服阀的液压输出端与机轮通过液压管路联通,为该机轮提供液压;所述压力传感器的液压输入端与伺服阀至机轮之间的液压管路联通,用于检测该机轮的实际刹车压力。所述切断阀包括内侧切断阀20和外侧切断阀1;所述伺服阀包括左外伺服阀11、左内伺服阀16、右内伺服阀15和右外伺服阀2;所述压力传感器包括左外压力传感器10、左内压力传感器19、右内压力传感器14和右外压力传感器5;所述机轮包括左外机轮8、左内机轮17、右内机轮13和右外机轮7;所述速度传感器包括左外速度传感器9、左内速度传感器18、右内速度传感器12和右外速度传感器6。其中,所述内侧切断阀20的液压输出端分别与左内伺服阀16的液压输入端和右内伺服阀15的液压输入端联通,为该左内伺服阀和右内伺服阀提供液压。所述外侧切断阀1的液压输出端分别与左外伺服阀11的液压输入端和右外伺服阀2的液压输入端联通,为左外伺服阀和右外伺服阀提供液压。该左外伺服阀的液压输出端和左外机轮8通过液压管路联通,为该左外机轮提供液压;左内伺服阀16的液压输出端和左内机轮17通过液压管路联通,为该左外机轮提供液压。该右内伺服阀15的液压输出端和右内机轮13通过液压管路联通,为该右内机轮提供液压;该右外伺服阀2的液压输出端和右外机轮7通过液压管路联通,为该右外机轮提供液压。该左外压力传感器10的液压输入端与左外伺服阀11至左外机轮8之间的液压管路联通,用于检测该左外机轮的实际刹车压力;左内压力传感器19的液压输入端与左内伺服阀16至左内机轮17之间的液压管路联通,用于检测该左内机轮的实际刹车压力。所述右内压力传感器14的液压输入端与右内伺服阀15至13右内机轮之间的液压管路联通,用于检测该右内机轮的实际刹车压力;右外压力传感器5的液压输入端与右外伺服阀2至右外机轮7之间的液压管路联通,用于检测该右外机轮的实际刹车压力。
[0088]
本实施例的特征在于,还包括选择开关3和刹车控制器4。其中:
[0089]
所述刹车控制器4的电信号输入端分别与自动刹车选择开关3的输出端、左外速度传感器9的输出端、左内速度传感器18的输出端、右内速度传感器12的输出端、右外速度传感器6的输出端、左外压力传感器10的输出端、左内压力传感19的输出端、右内压力传感器14的输出端、右外压力传感器19的输出端电气连接,分别接收自动刹车选择开关提供的挡位信号、各速度传感器提供的机轮速度信号和各压力传感器提供的实际刹车压力信号。
[0090]
该刹车控制器的电信号输出端分别与自动刹车选择开关3的输入端、内侧切断阀20的输入端、外侧切断阀1的输入端、左外伺服阀11的输入端、左内伺服阀16的输入端、右内伺服阀15的输入端、右外伺服阀2的输入端电气连接,向该自动刹车选择开关提供锁位电压、向该切断阀提供控制电压、向该伺服阀提供控制电流。
[0091]
图2中,所述自动刹车选择开关包含编码模块21和锁位模块22。所述编码模块的输出端与刹车控制器4的输入端联通,通过该编码模块将飞行员选择的自动刹车选择开的挡位通过二进制编码的形式分别发送至第一控制板26和第二控制板23。所述锁位模块的输入
端和该刹车控制器4的输出端联通,通过刹车控制器为该锁位模块提供锁位电压;锁位模块的输出端与该刹车控制器的输入端联通,通过该刹车控制器检测锁位模块的电压和电流。
[0092]
所述刹车控制器4包含第一控制板26和第二控制板23。该第一控制板和第二控制板之间通过rs 422联通。所述第一控制板包括检测模块28、第一采集模块29、第一控制模块27;第二控制板包括第二控制模块24和第二采集模块25。通过所述第一控制板控制内侧切断阀20、左内伺服阀16和右内伺服阀15;通过所述第二控制板控制外侧切断阀1、左外伺服阀11和右外伺服阀2。
[0093]
图3中,所述检测模块包含开关模块30、过流检测模块31、电流检测模块32和电压值回采模块33。该开关模块的输入端和第一控制模块27的输出端联通,通过该第一控制模块为该开关模块提供控制指令;该开关模块的输出端和锁位模块22的输入端联通,通过该开关模块为该锁位模块提供电压。所述电压值回采模块33的输入端与该锁位模块22的第一输出端联通,以检测该锁位模块的电压;电压值回采模块的输出端与第一控制模块27的第一输入端联通,为该第一控制模块提供锁位模块22的电压。所述电流检测模块32的输入端口与所述锁位模块的第二输出端口联通,采集该锁位模块的电流。所述电流检测模块32的第一输出端口与第一控制模块的第二输入端口联通,为该第一控制模块提供检测电流。所述过流检测模块31的输入端与电流检测模块32的第二输出端联通,为该过流检测模块提供电流值;过流检测模块的输出端和第一控制模块27的第三输入端口联通,为该第一控制模块提供自动刹车选择开关是否过流故障。
[0094]
实施例二
[0095]
本实施例提出了一种飞机自动刹车选择开关的锁位控制方法,具体过程是:
[0096]
步骤一,预设自动刹车选择开关的档位值
[0097]
自动刹车选择开关包含5个档位,分别为飞机起飞过程用于中止起飞的中止起飞挡位、关闭时的off挡位、以及飞机着陆过程用于着陆刹车的高、中、低三个档位。通过第一控制模块和第二控制模块预设对所述中止起飞挡位、关闭时的off挡位、以及着陆时的高、中、低三个档位的档位值,每一个档位预设一个值,并对所设置的值进行二进制编译,形成四位二进制的编译值。本实施例中,预设off档位值为6、中止起飞档位值为10、着陆时高档位值为3、着陆时中档位值为5、着陆时低档位值为9。
[0098]
步骤二,自动刹车选择开关预设档位二进制信息的编译:
[0099]
通过二进制编译,使预设的各档位值分别形成对应的4位二进制信息0011、0101、1001、0110和1010,并且该0011、0101、1001、0110和1010分别对应着陆时高档位值3、着陆时中档位值5、预设off档位值6、着陆时低档位值9和中止起飞档位值10。如表1所示。
[0100]
表1
[0101] 第一位第二位第三位第四位高档0011中档0101低档1001off档0110中止起飞档1010
[0102]
步骤三,飞行员选择的自动刹车选择开关档位二进制信息的编译:
[0103]
飞行员根据飞机状态选择自动刹车选择开关的档位:在飞机起飞过程中飞行员选择中止起飞档对飞机实施刹车时,或者在飞机着陆过程中飞行员根据跑道状态选择着陆时的高档或中档或低档时,自动刹车选择开关通过所述编码器模块将所选择的档位编译为4个离散信号;所述4个离散型号分别为第一离散信号、第二离散信号、第三离散信号和第四离散信号。
[0104]
当飞行员选择的自动刹车选择开关的档位为着陆时的高档位时,若自动刹车选择开关正常,编码模块编译的4个离散信号第一离散信号为0、第二离散信号为0、第三离散信号为1和第四离散信号1;若自动刹车选择开关为故障,编码模块编译的4个离散信号可能为非0011的任一组合。
[0105]
当飞行员选择的自动刹车选择开关的档位为着陆时的中档位时,若自动刹车选择开关正常,编码模块编译的4个离散信号第一离散信号为0、第二离散信号为1、第三离散信号为0和第四离散信号1;若自动刹车选择开关为故障,编码模块编译的4个离散信号可能为非0101的任一组合。
[0106]
当飞行员选择的自动刹车选择开关的档位为着陆时的低档位时,若自动刹车选择开关正常,编码模块编译的4个离散信号第一离散信号为1、第二离散信号为0、第三离散信号为0和第四离散信号1;若自动刹车选择开关为故障,编码模块编译的4个离散信号可能为非1001的任一组合。
[0107]
当飞行员选择的自动刹车选择开关的档位为off档位时,若自动刹车选择开关正常,编码模块编译的4个离散信号第一离散信号为0、第二离散信号为1、第三离散信号为1和第四离散信号0;若自动刹车选择开关为故障,编码模块编译的4个离散信号可能为非0110的任一组合。
[0108]
当飞行员选择的自动刹车选择开关的档位为起飞时的中止起飞档位时,若自动刹车选择开关正常,编码模块编译的4个离散信号第一离散信号为1、第二离散信号为0、第三离散信号为1和第四离散信号0;若自动刹车选择开关为故障,编码模块编译的4个离散信号可能为非1010的任一组合;
[0109]
将所选择档位的4个离散信号同时发送至第一采集模块和第二采集模块。
[0110]
第一控制模块接收第一采集模块采集的4个离散信号。第二控制模块接收第二采集模块采集的4个离散信号。
[0111]
第一控制模块将接收到的4个离散信号,按照第一离散信号、第二离散信号、第三离散信号、第四离散信号的顺序进行组合,形成飞行员选择的自动刹车选择开关档位四位二进制信息。
[0112]
第二控制模块将接收到的4个离散信号,按照第一离散信号、第二离散信号、第三离散信号、第四离散信号顺序进行组合,形成飞行员选择的自动刹车选择开关档位四位二进制信息。
[0113]
步骤四,判断选择的自动刹车选择开关档位的编译信息与预设的档位编译信息是否一致:
[0114]
分别通过第一控制模块和第二控制模块将步骤三中得到飞行员选择的自动刹车选择开关档位四位二进制信息与表1中预设的档位值进行比较:
[0115]
第一控制模块进行比较:
[0116]ⅰ在着陆时:
[0117]
若选择off档位,且该off档位的档位值与预设的off档位的档位值0110相同,则确定选择的自动刹车选择开关为off档;如果不同,则确定为故障。
[0118]
若选择高档位,且该高档位的档位值与预设的高档位的档位值0011相同,则确定选择的自动刹车选择开关为高档;如果不同,则确定为故障。
[0119]
若选择中档位,且该中档位的档位值与预设的中档位的档位值0101相同,则确定选择的自动刹车选择开关为中档;如果不同,则确定为故障。
[0120]
若选择低档位,且该低档位的档位值与预设的低档位的档位值1001相同,则确定选择的自动刹车选择开关为低档;如果不同,则确定为故障。
[0121]ⅱ在起飞时:
[0122]
若选择off档位,且该off档位的档位值与预设的off档位的档位值0110相同,则确定选择的自动刹车选择开关为off档;如果不同,则确定为故障。
[0123]
若选择中止起飞档位,且该中止起飞档位的档位值与预设的中止起飞档位的档位值1010相同,则确定选择的自动刹车选择开关为中止起飞档;如果不同,则确定为故障。
[0124]
完成第二控制控模块对自动刹车选择开关档位的确定。
[0125]
第二控制模块进行比较:
[0126]ⅰ在着陆时:
[0127]
若选择off档位,且该off档位的档位值与预设的off档位的档位值0110相同,则确定选择的自动刹车选择开关为off档;如果不同,则确定为故障。
[0128]
若选择高档位,且该高档位的档位值与预设的高档位的档位值0011相同,则确定选择的自动刹车选择开关为高档;如果不同,则确定为故障。
[0129]
若选择中档位,且该中档位的档位值与预设的中档位的档位值0101相同,则确定选择的自动刹车选择开关为中档;如果不同,则确定为故障。
[0130]
若选择低档位,且该低档位的档位值与预设的低档位的档位值1001相同,则确定选择的自动刹车选择开关为低档;如果不同,则确定为故障。
[0131]ⅱ在起飞时:
[0132]
若选择off档位,且该off档位的档位值与预设的off档位的档位值0110相同,则确定选择的自动刹车选择开关为off档;如果不同,则确定为故障。
[0133]
若选择中止起飞档位,且该中止起飞档位的档位值与预设的中止起飞档位的档位值1010相同,则确定选择的自动刹车选择开关为中止起飞档;若不同,则确定为故障。
[0134]
完成第二控制模块对自动刹车选择开关档位的确定。
[0135]
步骤五、判断第一控制模块和第二控制模块确定的档位是否一致:
[0136]
第二控制模块将确定的自动刹车选择开关档位发送到第一控制模块。将第二控制模块确定的自动刹车选择开关档位与所述第一控制模块确定的自动刹车选择开关档位进行比较;若比较的结果相同,进入步骤六;若比较的结果不相同,第一控制模块控制检测模块开关打开,对自动刹车选择开关进行解除锁位控制,并发送自动刹车故障。
[0137]
步骤六,判断锁位信号为1或0:
[0138]
刹车控制器接收轮载信号、指令传感器检测的脚蹬位置信号和速度传感器检测的机轮速度信号。
[0139]
当第一控制模块确定的档位为着陆时的高、中、低档中的任一档位时,如果轮载信号指示在空中,且脚蹬位置信号小于等于着陆脚蹬位置超控阈值时,第一控制模块设置锁位信息为1;反之,第一控制模块设置锁位信息为0。
[0140]
当第一控制模块确定的挡位为中止起飞挡位时,如果轮载信号指示在地面,且脚蹬位置信号小于等于中止起飞脚蹬位置超控阈值,且机轮速度信号小于等于中止起飞速度阈值时,第一控制模块设置锁位信息为1;反之,该第一控制模块设置锁位信息为0。
[0141]
当第二控制模块确定的档位为着陆时的高、中、低档位中的任一档位时,如果轮载信号指示在空中,且脚蹬位置信号小于等于着陆脚蹬位置超控阈值时,该第二控制模块设置锁位信息为1;反之,第二控制模块设置锁位信息为0。
[0142]
当第二控制模块确定的挡位为中止起飞挡位时,如果轮载信号指示在地面,且脚蹬位置信号小于等于中止起飞脚蹬位置超控阈值、机轮速度信号小于等于中止起飞速度阈值时,第二控制模块设置锁位信息为1,反之,第二控制模块设置锁位信息为0。
[0143]
本实施例中,着陆脚蹬位置超控阈值为20%,中止起飞脚蹬位置超控阈值为30%,中止起飞速度阈值为70km/h。
[0144]
步骤七,判断是否对自动刹车选择开关进行锁位控制:
[0145]
所述第一控制模块接收第二控模块的锁位信息。当该第一控制模块和第二控制模块的锁位信息均为1时,则第一控制模块控制检测模块开关关闭,向自动刹车选择开关提供28v电压,对自动刹车选择开关进行锁位控制;反之,则第一控制模块控制检测模块开关打开,对自动刹车选择开关进行解除锁位控制。
[0146]
步骤八、判断自动刹车选择开关是否故障:
[0147]
当所述第一控制模块对自动刹车选择开关进行锁位控制时,电流检测模块检测到的电流应为i
a
±
δi,电压值回采模块检测到的电压应为v
a
。当该第一控制模块对自动刹车选择开关进行解除锁位控制时,电流检测模块检测到的电流应为0,电压值回采模块检测到的电压应为0。
[0148]
当所述第一控制模块对自动刹车选择开关进行锁位控制时,如果电流检测模块检测到的电流为0,电压值回采模块检测到的电压为0,则判定为检测模块的开关打开失败;当第一控制模块对自动刹车选择开关进行解除锁位控制时,如果电流检测模块检测到的电流值为i
a
±
δi,电压值回采模块检测到的电压为v
a
,则判定为检测模块的开关关闭失败;如果电流检测模块检测到的电流为0,电压值回采模块检测到的电压为v
a
,则判定为自动刹车选择开关为开路故障;如果过流检测模块检测到电流大于等于i
o
,则判定位自动刹车选择开关为短路故障。
[0149]
其中,i
a
为自动刹车选择开关锁位所需电流,δi为自动刹车选择开关锁位所需电流的容差,v
a
为自动刹车选择开关锁位所需电压,i
o
为过流门限值。
[0150]
当检测模块判断自动刹车选择开关故障时,刹车控制器发送自动刹车故障;反之,根据步骤九,刹车控制器判断是否实施自动刹车。
[0151]
本实施例中,自动刹车选择开关锁位所需电流i
a
为200ma,自动刹车选择开关锁位所需电流的容差δi为
±
10ma,自动刹车选择开关锁位所需电压v
a
为16
‑
32v,过流门限值为400ma。
[0152]
步骤九、判断是否实施自动刹车:
[0153]
当自动刹车选择开关的档位为着陆时的高档、中档或低档中的任一档位时,刹车控制器接收轮载信号,当轮载信号指示在地面并持续时间t1后,实施着陆自动刹车。
[0154]
当自动刹车选择开关的挡位为中止起飞挡位时,刹车控制器接收油门杆信号,当油门杆信号指示在慢车位时,实施中止起飞。
[0155]
在本实施例中,轮载信号指示在地面的持续时间t1为2秒。
[0156]
步骤十、实施自动刹车:
[0157]
着陆时,所述着陆时的高、中、低挡位分别对应一个预设的减速度a
p
。当实施着陆自动刹车时,刹车控制器接收飞机加速度a
t
,通过飞机加速度与预设的减速度的差值进行pid控制计算刹车压力p
t
。
[0158]
p
t
=(a
p
‑
a
t
)
×
pid
[0159]
式中,a
p
为着陆时的挡位对应的预设减速度,a
t
为飞机加速度,p
t
为刹车压力。
[0160]
当实施中止起飞时,输出刹车压力p
t
=p
max
。
[0161]
其中,p
max
为机轮刹车系统最大刹车压力。
[0162]
本实施例中,着陆时高挡位预设的减速率为3.0m/s2;中挡位预设的减速率为2.1m/s2;低挡位预设的减速率为1.5m/s2,最大刹车压力p
max
为3000psi。
[0163]
步骤十一,判断是否退出自动刹车:
[0164]
在判断是否退出自动刹车时,刹车控制器接收速度传感器检测的机轮速度信号,指令传感器检测的脚蹬位置信号。当机轮速度小于等于退出自动刹车速度阈值,或者脚蹬位置大于等于脚蹬位置超控阈值,或者检测到自动刹车选择开关为off挡位时,刹车控制器退出自动刹车,第一控制模块自动刹车选择开关进行解除锁位控制,使自动刹车选择开关回复到off挡位。
[0165]
本实施例中,退出自动刹车速度阈值为10km/h,脚蹬位置超控阈值为20%。