1.本实用新型涉及无人机技术领域,尤其涉及一种便于拆装的无人机用螺旋桨。
背景技术:
2.无人驾驶飞机简称“无人机”,英文缩写为“uav”,是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞机,或者由车载计算机完全地或间歇地自主地操作,目前无人机已经广泛的运用到了生活、科研、军事等领域,无人机在使用的过程中经常因为碰撞或者老化需要对螺旋桨进行换,目前市面上存在的无人机不方便对其螺旋桨进行拆装。
技术实现要素:
3.本实用新型的目的是为了解决现有技术中存在的缺点,而提出的一种便于拆装的无人机用螺旋桨。
4.为了实现上述目的,本实用新型采用了如下技术方案:
5.一种便于拆装的无人机用螺旋桨,包括无人机本体、安装块和螺旋桨,所述安装块设置于无人机本体的左右两侧且与其通过固定杆固定连接,所述螺旋桨设置于螺旋桨的上方,所述安装块的上端固定连接有四边形块,所述四边形块的下端卡接在安装块内且通过固定螺栓与其固定连接,所述四边形块的中部开设有通孔,所述螺旋桨的中部固定连接有连接轴,所述连接轴的下端位于通孔中,所述连接轴的下端中部开设有六边形槽,所述安装块内设置有驱动电机,所述驱动电机的输出端通过联轴器固定连接有与六边形槽形状相互匹配的驱动轴,所述螺旋桨通过卡接机构卡接在四边形块内并与其转动连接,所述卡接机构包括推动杆、推块和卡块,所述推块设置于四边形块的内壁中并与其滑动连接,所述推动杆的一端与推块远离连接轴的一侧卡接,所述推动杆的另一端贯穿四边形块且与其螺纹连接,所述连接轴正对推块的位置设置有卡槽,所述卡块的数量两个且关于推块上下对称设置并与其滑动连接,所述卡块下侧的推块上固定连接有固定杆,所述固定杆上左右对称设置有与其滑动连接的滑块,所述滑块之间的固定杆上套有分别与滑块固定连接的第一弹簧,所述滑块的上侧铰接有摆动杆,所述摆动杆远离滑块的一端与卡块铰接,所述卡块的上侧设置有卡接在卡块中并与其转动连接的滚珠。
6.作为本实用新型再进一步的方案:所述推块的数量为四个且设置于四边形块的四周。
7.作为本实用新型再进一步的方案:所述滚珠的数量为七个。
8.作为本实用新型再进一步的方案:所述四边形块上方设置有辅助稳定机构,所述辅助稳定机构包括上卡块和第二卡块,所述上卡块与连接轴的上端固定连接,所述四边形块的侧边正对上卡块的位置上开设有环形槽,所述第二卡块与上卡块之间滑动连接且正对环形槽,所述第二卡块与上卡块之间通过第二弹簧弹性连接。
9.作为本实用新型再进一步的方案:所述第二卡块的上下两侧滑动连接有定位杆,所述定位杆与上卡块之间固定连接。
10.本实用新型的有益效果为:
11.通过设置的卡接机构,安装螺旋桨时,将连接轴插入四边形块中,使驱动轴卡进六边形槽中,随后通过转动推动杆带动推块向着连接轴的方向运动,使其卡进安装槽中,对连接轴的上下运动进行限位,当连接轴上下摆动时,卡块将会对其起到限位的作用,将会带动摆动杆进行摆动,使得固定杆左右运动,拉伸第一弹簧,起到一个缓冲的作用,通过设置的滚珠能够在连接轴转动时减小与推块之间的摩擦力,当需要拆卸螺旋桨时,通过转动推动杆使其从安装槽中脱离即可,操作简单方便。
附图说明
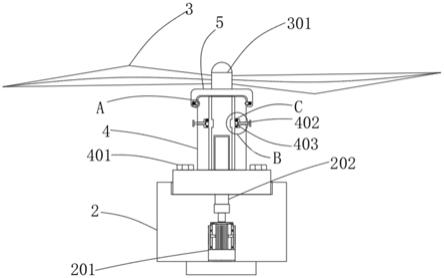
12.图1为一种便于拆装的无人机用螺旋桨的总体结构示意图;
13.图2为一种便于拆装的无人机用螺旋桨的安装块结构示意图;
14.图3为一种便于拆装的无人机用螺旋桨的b处结构示意图;
15.图4为一种便于拆装的无人机用螺旋桨的连接轴结构示意图;
16.图5为一种便于拆装的无人机用螺旋桨的c处结构示意图;
17.图6为一种便于拆装的无人机用螺旋桨的a处结构示意图。
18.图中:1无人机本体、2安装块、201驱动电机、202驱动轴、3螺旋桨、301连接轴、302六边形槽、4连接块、401固定螺栓、402推动杆、403推块、404第一弹簧、405滑块、406固定杆、407摆动杆、408卡块、409滚珠、5上卡块、501定位杆、502第二弹簧、503第二卡块。
具体实施方式
19.下面结合具体实施方式对本专利的技术方案作进一步详细地说明。
20.下面详细描述本专利的实施例,所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,仅用于解释本专利,而不能理解为对本专利的限制。
21.在本专利的描述中,需要理解的是,术语“中心”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本专利和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本专利的限制。
22.在本专利的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“设置”应做广义理解,例如,可以是固定相连、设置,也可以是可拆卸连接、设置,或一体地连接、设置。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本专利中的具体含义。
23.实施例1
24.参照图1
‑
5,一种便于拆装的无人机用螺旋桨,包括无人机本体1、安装块2和螺旋桨3,所述安装块2设置于无人机本体1的左右两侧且与其通过固定杆固定连接,所述螺旋桨3设置于螺旋桨3的上方,所述安装块2的上端固定连接有四边形块4,所述四边形块4的下端卡接在安装块2内且通过固定螺栓401与其固定连接,所述四边形块4的中部开设有通孔,所述螺旋桨3的中部固定连接有连接轴301,所述连接轴301的下端位于通孔中,所述连接轴301的下端中部开设有六边形槽302,所述安装块2内设置有驱动电机201,所述驱动电机201
的输出端通过联轴器固定连接有与六边形槽302形状相互匹配的驱动轴202,从而能够通过驱动电机201的转动带动连接轴301的转动,从而带动螺旋桨3的转动,所述螺旋桨3通过卡接机构卡接在四边形块4内并与其转动连接,所述卡接机构包括推动杆402、推块403和卡块408,所述推块403设置于四边形块4的内壁中并与其滑动连接,所述推动杆402的一端与推块403远离连接轴301的一侧卡接,所述推动杆402的另一端贯穿四边形块4且与其螺纹连接,所述连接轴301正对推块403的位置设置有卡槽,使得推块403可以卡接于其中,所述卡块408的数量两个且关于推块403上下对称设置并与其滑动连接,所述卡块408下侧的推块403上固定连接有固定杆406,所述固定杆406上左右对称设置有与其滑动连接的滑块405,所述滑块405之间的固定杆406上套有分别与滑块405固定连接的第一弹簧404,所述滑块405的上侧铰接有摆动杆407,所述摆动杆407远离滑块405的一端与卡块408铰接,所述卡块408的上侧设置有卡接在卡块408中并与其转动连接的滚珠409;工作原理;安装螺旋桨3时,将连接轴301插入四边形块4中,使驱动轴202卡进六边形槽302中,随后通过转动推动杆402带动推块403向着连接轴301的方向运动,使其卡进安装槽中,对连接轴301的上下运动进行限位,当连接轴301上下摆动时,卡块408将会对其起到限位的作用,将会带动摆动杆407进行摆动,使得固定杆406左右运动,拉伸第一弹簧404,起到一个缓冲的作用,通过设置的滚珠409能够在连接轴301转动时减小与推块403之间的摩擦力,当需要拆卸螺旋桨3时,通过转动推动杆402使其从安装槽中脱离即可。
25.进一步的,所述推块403的数量为四个且设置于四边形块4的四周,使其更加的稳定。
26.更进一步的,所述滚珠409的数量为七个。
27.实施例2
28.参照图6,一种便于拆装的无人机用螺旋桨,本实施例相较于实施例1,还包括设置于四边形块4上方的辅助稳定机构,所述辅助稳定机构包括上卡块5和第二卡块503,所述上卡块5与连接轴301的上端固定连接,所述四边形块4的侧边正对上卡块5的位置上开设有环形槽,所述第二卡块503与上卡块5之间滑动连接且正对环形槽,所述第二卡块503与上卡块5之间通过第二弹簧502弹性连接;工作原理:使用时,将第二卡块503卡进环形槽中,从而在转动时第二卡块503能够使得上卡块5更加的稳定,连接轴301的转动将会带动上卡块5转动,从而带动第二卡块503在环形槽内转动,从而保持上卡块5的稳定,使得连接轴301能够更加的稳定。
29.进一步的,所述第二卡块503的上下两侧滑动连接有定位杆501,所述定位杆501与上卡块5之间固定连接,对第二卡块503起到定位的作用。
30.以上所述,仅为本实用新型较佳的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,根据本实用新型的技术方案及其实用新型构思加以等同替换或改变,都应涵盖在本实用新型的保护范围之内。