1.本发明涉及司机控制器技术领域,特别涉及一种机车司机控制器及其控制方法。
背景技术:
2.目前运用的机车司机控制器多为机械式司机控制器,现有技术少有集成了数字化、智能化操作装置与机械式操作装置于一体的机车司机控制器,而产品数字化、智能化是社会发展的必然趋势,一种具备数字化、智能化操作的司机控制器是未来发展的必然趋势。
3.多功能司机控制器模拟系统(授权公告号:cn205750339)通过在通用司机控制器的后级串联一个电子控制单元,构成一款多功能司机控制器模拟系统;在不同的项目中,通过调整电子控制单元的软件逻辑功能,产生不同项目司机器的功能输出,减少不同项目对不同型号的司机控制器的需求,减少系统试验的成本,减少资源的浪费,但该方案中没有兼容机械操作功能与数字操作功能。
技术实现要素:
4.本发明的目的在于提供一种集成了数字化、智能化操作装置与机械式操作装置于一体的新一代机车司机控制器,既具备了数字化、智能化操作功能,符合产品数字化、智能化的发展趋势,又兼备了机械式操作的稳定可靠。
5.为实现上述目的,本发明采用如下技术方案:
6.一种机车司机控制器,包括第一操作装置与第二操作装置,所述第一操作装置具有工作状态和非工作状态,所述第二操作装置具有工作状态和非工作状态,还包括联锁单元,所述联锁单元包括连接所述第一操作装置的联锁凸轮、及连接所述第二操作装置的联锁按钮,所述联锁凸轮与所述联锁按钮之间具有联锁开关释放状态和联锁开关压缩状态,其中,当所述第一操作装置为工作状态时,所述联锁凸轮与所述联锁按钮之间处于联锁开关压缩状态,所述第二操作装置进入非工作状态,当所述第一操作装置为非工作状态时,所述联锁凸轮与所述联锁按钮之间处于联锁开关释放状态,所述第二操作装置能够进入工作状态。实现了集成第一操作装置与第二操作装置的机车司机控制器,并通过设置联锁单元,使第一操作装置的逻辑控制信号等级高于第二操作装置的逻辑控制信号等级。
7.作为进一步的方案,所述第一操作装置为机械式操作装置,所述第一操作装置包括机械牵引制动单元、机械方向单元、机械锁,所述机械牵引制动单元与所述机械方向单元分别和所述机械锁形成机械互锁连接。
8.作为进一步的方案,所述第二操作装置为数字式操作装置,所述第二操作装置包括数字锁、数字方向操作单元、数字牵引制动单元,所述数字方向操作单元与所述数字牵引制动单元分别和所述数字锁形成电气互锁连接。
9.第一操作装置为机械式操作装置,第二操作装置为数字式操作装置,使机车司机控制器成了集数字式操作装置与机械式操作装置于一体的新一代机车司机控制器。
10.作为进一步的方案,所述数字锁为指纹解锁、密码解锁、人面识别解锁、id卡解锁、
虹膜解锁中的一种。
11.作为进一步的方案,所述第一操作装置的输出信号为硬件信号,所述硬件信号包括锁信号、机械方向信号,牵引制动信号,所述第二操作装置的输出信号为通讯信号,所述通讯信号为mvb网络信号、can信号、以太网信号中的一种,所述通讯信号包括启动信息、方向信息、牵引制动速率。
12.与机车司机控制器对应的是一种机车司机控制器的控制方法,所述机车司机控制器执行的任务包括机械操作任务和数字操作任务,所述机械操作任务包括机械方向操作单元、机械牵引制动单元及机械锁,所述数字操作任务包括数字方向操作操作单元、数字牵引制动单元及数字锁,
13.所述机械操作任务的响应优先级高于所述数字操作任务的响应优先级,响应所述机械操作任务时,所述数字锁处于锁定状态;
14.所述机车司机控制器的控制方法包括:
15.在执行所述机械方向操作或所述机械牵引制动之前判断所述机械锁是否为锁定状态,若机械锁处于锁定状态时,则机械方向操作于牵引制动操作被锁在初始状态,不可进行所述机械操作任务,若机械锁处于未锁定状态时,执行所述机械方向操作或所述机械牵引制动;
16.在执行所述数字方向操作操作或所述数字牵引制动之前判断所述数字锁是否锁定,若数字锁处于锁定状态时,则将所述数字操作任务锁定在初始状态,若数字锁处于未锁定状态时,执行所述数字方向操作操作或所述数字牵引制动。
17.作为进一步的方案,所述机械操作任务和所述数字操作任务均具有标志位,所述标志位包括0位与非0位;
18.所述机械操作任务的标志位为0时,表示未执行所述机械操作任务,即初始状态,所述机械操作任务的标志位为非0时,表示在执行所述机械操作任务;
19.所述数字操作任务的标志位为0时,表示未执行所述数字操作任务,即初始状态,所述数字操作任务的标志位为非0时,表示在执行所述数字操作任务;
20.其中,所述机械操作任务的标志位为非0时,不能执行所述数字操作任务,所述机械操作任务的标志位为0时,解开所述数字锁后,执行所述数字操作任务。
21.作为进一步的方案,所述控制方法还包括步骤:
22.当数字式牵引制动单元输出网络信号为非0位信号、机械式操作单元输出i/o信号为0位信号时,按照网络信号进行整车的牵引制动控制;
23.当机械式牵引制动单元输出i/o信号为非0位信号时,数字式牵引制动单元会按照预先设置进行断电关机、切断输出信号或输出判断信号等动作,整车按照机械式牵引制动单元输出的i/o信号进行牵引制动状态的判断;
24.当机械式牵引制动单元对数字式操作单元进行锁闭后,机械式牵引制动单元回复0位后,数字式操作操作单元的锁闭状态未解锁时,整车按照机械式牵引制动单元输出的i/o信号进行牵引制动状态的判断。
25.作为进一步的方案,所述机械操作任务的具体步骤:
26.所述机械牵引制动单元与所述机械方向单元分别和所述机械锁形成机械互锁连接,当所述机械锁处于开位时,所述机械方向单元能够切换至向前位或向后位、并输出相应
的i/o信号及执行相应的任务,所述机械牵引制动单元能够推出0位至牵引位或制动位、并输出相应的i/o信号及执行相应的任务。
27.作为进一步的方案,所述数字操作控制的具体步骤:
28.所述数字方向操作单元与所述数字牵引制动单元分别和所述数字锁形成电气互锁连接,当所述数字锁解锁时,所述数字方向单元能够切换至向前位或向后位、并输出相应的网络信号及执行相应的任务,所述数字牵引制动单元能够在0位、牵引位、制动位间切换、并输出相应的网络信号及执行相应的任务。
29.本发明实现的有益效果:
30.通过使用本发明,能够实现轨道交通车辆司机控制器的数字化、智能化操作,具体效果如下:
31.(1)机车司机控制器集数字式操作装置与机械式操作装置于一体,在车辆运行过程中,可以采用任意一种操作方式进行车辆操控;
32.(2)在任意情况下,机械式操作装置输出信号可以切断数字式操作装置输出信号;
33.(3)在紧急状态下,可以迅速操作更为直观、手感更为明确的机械式手柄,避免制动或加速过快或过慢。
附图说明
34.为了更清楚地说明本发明的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一个实施例,对于本领域普通技术人员来说,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
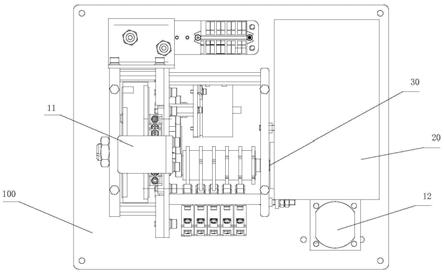
35.图1为本发明实施例的俯视图;
36.图2为本发明实施例的侧视图;
37.图3为本发明实施例的主视图;
38.图4为本发明实施例的联锁凸轮与所述联锁按钮处于联锁开关释放状态;
39.图5为本发明实施例的联锁凸轮与所述联锁按钮处于联锁开关压缩状态。
40.其中:100、面板,10、第一操作装置,11、机械牵引制动单元,12、机械方向单元,20、第二操作装置,21、数字方向操作单元,22、数字牵引制动单元,30、联锁单元,31、联锁凸轮,32、联锁按钮。
具体实施方式
41.如图1~图5所示,一种机车司机控制器,包括面板100、及集成在面板100上的第一操作装置10与第二操作装置20,第一操作装置10包括机械牵引制动单元11、机械方向单元12、机械锁(图略),机械牵引制动单元11与1机械方向单元12分别和所述机械锁联动连接,联动连接的方式是机械牵引制动单元11与机械方向单元12分别和机械锁形成机械互锁连接,机械牵引制动单元11包括工作状态与非工作状态;第二操作装置20包括数字锁(图略)、数字方向操作单元21、数字牵引制动单元22,数字方向操作单元21与数字牵引制动单元22分别和所述数字锁联动连接,联动连接的方式是数字牵引制动单元22与数字方向单元21分别和数字锁形成电气互锁连接,数字牵引制动单元22包括工作状态和非工作状态;所述机车司机控制器还包括联锁单元30,联锁单元30包括连接第一操作装置10的联锁凸轮31、及
连接第二操作装置20的联锁按钮32,联锁凸轮31与联锁按钮32之间具有联锁开关释放状态和联锁开关压缩状态;其中,当机械牵引制动单元11为工作状态时,联锁凸轮31与联锁按钮32之间处于联锁开关压缩状态,数字牵引制动单元22进入非工作状态,当机械牵引制动单元11为非工作状态时,联锁凸轮31与联锁按钮32之间处于联锁开关释放状态,数字牵引制动单元22进入工作状态。这样本发明能够实现轨道交通车辆司机控制器的数字化、智能化操作,在数字式、智能化操作的同时,司机控制器又具备了机械式操作装置,在车辆运行过程中,可以采用任意一种操作方式进行车辆操控;在任意情况下,机械式操作装置输出信号可以切断数字式操作装置输出信号;在紧急状态下,可以迅速操作更为直观、手感更为明确的机械式手柄,避免制动或加速过快或过慢。
42.如图4,联锁凸轮31没有压住联锁按钮32,表示联锁凸轮31与联锁按钮32之间处于联锁开关释放状态。
43.如图5,联锁凸轮31压住联锁按钮32,表示联锁凸轮31与联锁按钮32之间处于联锁开关压缩状态。
44.具体的,第一操作装置10的逻辑控制信号等级高于第二操作装置20的逻辑控制信号等级,第一操作装置10为机械式操作装置,其输出信号为硬线信号,所述第二操作装置20为数字式操作装置,其输出信号为通讯信号,所述通讯信号包括启动信息、方向信息、牵引制动速率,第一操作装置10的输出信号为硬件信号,硬件信号包括锁信号、机械方向信号,牵引制动信号。机械式操作装置与数字化操作装置之间存在机械、电气联锁,机械式操作装置输出信号优先于数字化操作装置,机械式操作装置工作时,会从机械、电气、通讯等方面切断数字化操作装置对机车的操作指令。司机控制器数字式操作装置具有锁单元、方向操作、牵引制动操作、无人驾驶模式等功能。数字式操作装置的锁是用于仅解锁数字式操作装置,可以是指纹解锁、密码解锁、人面识别解锁、虹膜解锁等方式,具体方式选择根据实际接口确定;数字式方向操作部分为方向选择部分,包括向前、0位和向后等选择,根据接口需要,可以是触屏滑动控键、可以是触屏按键;牵引制动单元是触屏滑动控件,可显示选择的牵引速动、制动比例的具体数值;根据具体司机控制器需要,可以在界面上增加自动驾驶模式按钮,数字式操作装置输出信号的通讯方式为mvb网络信号,也可根据具体系统更改为can信号或者以太网等网络信号;在整车系统中,设置司机控制器的机械式操作装置输出的i/o信号优先级高于数字式操作装置的mvb等网络信号,司机控制器机械式操作装置作为列车司控信息输入时,即i/o信号输出时,系统根据i/o信号进行方向、牵引制动等控制;司机控制器数字式操作装置具有信息录入与启动单元、方向选择单元、牵引制动单元等部分组成,每部分在显示屏上都具有独立、限界清晰的操作区域。
45.与机车司机控制器对应的是一种机车司机控制器的控制方法,所述机车司机控制器执行的任务包括机械操作任务和数字操作任务,所述机械操作任务包括机械方向操作单元、机械牵引制动单元及机械锁,所述数字操作任务包括数字方向操作操作单元、数字牵引制动单元及数字锁,其中机械操作任务的具体步骤是所述机械牵引制动单元与所述机械方向单元分别和所述机械锁形成机械互锁连接,当所述机械锁处于开位时,所述机械方向单元能够切换至向前位或向后位、并输出相应的i/o信号及执行相应的任务,所述机械牵引制动单元能够推出0位至牵引位或制动位、并输出相应的i/o信号及执行相应的任务,数字操作控制的具体步骤是所述数字方向操作单元与所述数字牵引制动单元分别和所述数字锁
形成电气互锁连接,当所述数字锁解锁时,所述数字方向单元能够切换至向前位或向后位、并输出相应的网络信号及执行相应的任务,所述数字牵引制动单元能够在0位、牵引位、制动位间切换、并输出相应的网络信号及执行相应的任务。
46.设计时,所述机械操作任务的响应优先级高于所述数字操作任务的响应优先级,响应所述机械操作任务时,所述数字锁处于锁定状态;
47.所述机车司机控制器的控制方法包括:在执行所述机械方向操作或所述机械牵引制动之前判断所述机械锁是否为锁定状态,若机械锁处于锁定状态时,则中断所述机械操作任务,若机械锁处于未锁定状态时,执行所述机械方向操作或所述机械牵引制动;在执行所述数字方向操作操作或所述数字牵引制动之前判断所述数字锁是否锁定,若数字锁处于锁定状态时,则中断所述数字操作任务,若数字锁处于未锁定状态时,执行所述数字方向操作操作或所述数字牵引制动。
48.具体的,所述机械操作任务和所述数字操作任务均具有标志位,所述标志位包括0位与非0位,0位表示非工作状态,非0位表示工作状态,所述机械操作任务的标志位为0时,表示未执行所述机械操作任务,所述机械操作任务的标志位为非0时,表示在执行所述机械操作任务;所述数字操作任务的标志位为0时,表示未执行所述数字操作任务,所述数字操作任务的标志位为非0时,表示在执行所述数字操作任务;中,所述机械操作任务的标志位为非0时,不能执行所述数字操作任务,所述机械操作任务的标志位为0时,解开所述数字锁后,执行所述数字操作任务。
49.作为进一步的具体实施方案,所述控制方法还包括步骤:
50.当数字式牵引制动单元输出网络信号为非0位信号、机械式操作装置输出i/o信号为0位信号时,按照网络信号进行整车的牵引制动控制;
51.当机械式牵引制动单元输出i/o信号为非0位信号时,数字式牵引制动单元会按照预先设置进行断电关机、切断输出信号或输出判断信号等动作,整车按照机械式牵引制动单元输出的i/o信号进行牵引制动状态的判断;
52.当机械式牵引制动单元对数字式操作装置进行锁闭后,机械式牵引制动单元回复0位后,数字式操作操作装置的锁闭状态未解锁时,整车按照机械式牵引制动单元输出的i/o信号进行牵引制动状态的判断。
53.最后需要说明的是,上述实施例阐明的内容应当理解为这些实施例仅用于更清楚地说明本发明,而不用于限制本发明的范围,在阅读了本发明之后,本领域技术人员对本发明的各种等价形式的修改均落于本技术所附权利要求所限定的范围。