1.本发明涉及矿用自卸车技术领域,更具体地说,涉及一种电动轮式矿用自卸车及其无人驾驶系统。
背景技术:
2.矿用自卸车广泛应用于冶金、有色、化工、煤炭、建材、水电等行业的土石方运输,是目前大型露天矿山的主要运输工具。在很多矿山企业,巨型矿山机械每天24h不间断工作,操作员必须忍受噪音、浮尘、颠簸等恶劣工作环境,工作环境中的高温、高湿、噪声、振动等对矿山设备操作人员的健康造成极大危害,新世纪的年轻人都不愿意从事该工作,企业出现招工难的问题。在这种大环境下,矿山运输无人驾驶技术逐渐兴起并成为矿山工程装备自动化的关键技术。
3.矿用自卸车中,电动轮式矿用自卸车是常用类型的一种,例如小松830e/930e电动轮式矿用自卸车。目前,如何改造电动轮式矿用自卸车,以实现在人工驾驶制动和无人驾驶制动之间进行切换,满足既能人工驾驶也能无人驾驶的需求,是目前本领域技术人员亟待解决的问题。
技术实现要素:
4.本发明的目的是提供一种电动轮式矿用自卸车的无人驾驶系统,以实现在人工驾驶制动和无人驾驶制动之间进行切换,满足既能人工驾驶也能无人驾驶的需求。本发明的另一目的是提供一种包括上述无人驾驶系统的电动轮式矿用自卸车。
5.为了实现上述目的,本发明提供如下技术方案:
6.一种电动轮式矿用自卸车的无人驾驶系统,包括无人驾驶液压制动模块,所述无人驾驶液压制动模块包括:前制动蓄能器、后制动蓄能器、踏板制动阀、前继动阀、后继动阀、无人驾驶前制动阀组、以及无人驾驶后制动阀组;
7.其中,所述踏板制动阀的第一进阀口、所述前继动阀的第一进阀口均和所述前制动蓄能器的出阀口连通,所述踏板制动阀的第二进阀口、所述后继动阀的第一进阀口均和所述后制动蓄能器的出阀口连通;
8.所述无人驾驶前制动阀组具有前制动第一阀口、前制动第二阀口、前制动第三阀口,所述前制动第一阀口和所述前制动蓄能器的出油口连通,所述前制动第二阀口和所述踏板制动阀的前制动出阀口连通,所述前制动第三阀口和所述前继动阀的第二进阀口连通;
9.所述无人驾驶后制动阀组具有后制动第一阀口、后制动第二阀口、后制动第三阀口,所述后制动第一阀口和所述后制动蓄能器的出油口连通,所述后制动第二阀口和所述踏板制动阀的后制动出阀口连通,所述后制动第三阀口和所述后继动阀的第二进阀口连通;
10.若所述电动轮式矿用自卸车采用无人驾驶制动,所述前制动第一阀口和所述前制
动第三阀口连通,所述后制动第一阀口和所述后制动第三阀口连通;
11.若所述电动轮式矿用自卸车采用人工驾驶制动,所述前制动第二阀口和所述前制动第三阀口连通,所述后制动第二阀口和所述后制动第三阀口连通。
12.可选地,所述无人驾驶前制动阀组包括:前比例阀、前开关阀、前梭阀、以及检测所述前比例阀内压力的前压力传感器,所述无人驾驶后制动阀组包括:后比例阀、后开关阀、后梭阀、以及检测所述后比例阀内压力的后压力传感器;
13.其中,所述前比例阀的第一阀口为所述前制动第一阀口,所述前比例阀的第二阀口和所述前开关阀的第一阀口连通,所述前开关阀的第二阀口和所述前梭阀的第一阀口连通,所述前梭阀的第二阀口为所述前制动第二阀口,所述前梭阀的第三阀口为所述前制动第三阀口;
14.所述后比例阀的第一阀口为所述后制动第一阀口,所述后比例阀的第二阀口和所述后开关阀的第一阀口连通,所述后开关阀的第二阀口和所述后梭阀的第一阀口连通,所述后梭阀的第二阀口为所述后制动第二阀口,所述后梭阀的第三阀口为所述后制动第三阀口;
15.若所述电动轮式矿用自卸车采用无人驾驶制动,所述前梭阀的第一阀口连通和所述前梭阀的第三阀口连通,所述后梭阀的第一阀口和所述后梭阀的第三阀口连通;
16.若所述电动轮式矿用自卸车采用人工驾驶制动,所述前梭阀的第二阀口连通和所述前梭阀的第三阀口连通,所述后梭阀的第二阀口和所述后梭阀的第三阀口连通;
17.若所述电动轮式矿用自卸车采用无人驾驶制动和人工驾驶制动,所述前梭阀的第一阀口和所述前梭阀的第二阀口中压力较大的一者和所述前梭阀的第三阀口连通,所述后梭阀的第一阀口和所述后梭阀的第二阀口中压力较大的一者和所述后梭阀的第三阀口连通。
18.可选地,电动轮式矿用自卸车的的无人驾驶系统还包括:主机,与所述主机通信连接的电子控制单元;其中,所述电子控制单元根据所述主机的指令控制所述无人驾驶前制动阀组和所述无人驾驶后制动阀组可选地,电动轮式矿用自卸车的的无人驾驶系统还包括无人驾驶液压转向模块,所述无人驾驶液压转向模块包括:转向器、流量放大器、以及转角传感器;
19.其中,所述转向器为电控液压转向器,所述转角传感器用于检测转向油缸的转角;
20.所述转向器通过转向管组向所述流量放大器输入液压油,所述转向管组包括:转向梭阀、转向单向阀、r管道、l管道、t管道、ls管道、p管道和辅助管道;
21.所述转向器的r阀口和所述流量放大器的r阀口通过转向r管道连通,所述转向器的l阀口和所述流量放大器的l阀口通过l管道连通,所述转向器的t阀口和所述流量放大器的t阀口通过t管道连通,所述转向器的ls阀口和所述流量放大器的ls阀口通过ls管道连通,所述转向器的p阀口和所述流量放大器的p阀口通过p管道连通;
22.所述转向梭阀的第一阀口和所述r管道连通,所述转向梭阀的第二阀口和所述l管道连通,所述转向梭阀的第三阀口和所述转向单向阀的第一阀口连通,所述转向单向阀的第二阀口和所述ls管道连通,所述转向单向阀仅能自所述转向梭阀向所述ls管道导通;
23.所述p管道和所述ls管道通过辅助管道连通,且所述辅助管道在所述ls管道上的连通位置位于所述转向单向阀和所述流量放大器之间。
24.可选地,电动轮式矿用自卸车的的无人驾驶系统还包括通信连接的主机和转向控制器,所述转向控制器根据所述主机的指令控制所述转向器向所述流量放大器输出设定比例的液压油以控制转向油缸旋转设定转角。
25.可选地,电动轮式矿用自卸车的的无人驾驶系统还包括无人驾驶车斗液压控制模块,所述无人驾驶车斗液压控制模块包括:起升阀、起升先导阀和无人驾驶车斗控制阀组;
26.其中,所述无人驾驶车斗控制阀组包括:第一切换阀、车斗阀组、第二切换阀a和第二切换阀b;
27.所述第一切换阀的第一阀口用于供泵组进油,所述第一切换阀的第二阀口和所述起升先导阀的起升先导阀第一阀口连通,所述第一切换阀的第三阀口和所述车斗阀组的第一阀口连通;
28.所述第二切换阀a的第一阀口和所述起升阀的起升阀第一阀口连通,所述第二切换阀a的第二阀口和所述起升先导阀的起升先导阀第二阀口连通,所述第二切换阀a的第三阀口和所述车斗阀组的第二阀口连通;
29.所述第二切换阀b的第一阀口和所述起升阀的起升阀第二阀口连通,所述第二切换阀b的第二阀口和所述起升先导阀的起升先导阀第三阀口连通,所述第二切换阀b的第三阀口和所述车斗阀组的第三阀口连通;
30.若电动轮式矿用自卸车处于人工驾驶车斗控制模式,所述第一切换阀的第一阀口和所述第一切换阀的第二阀口连通,所述第二切换阀a的第一阀口和所述第二切换阀a的第二阀口连通,所述第二切换阀b的第一阀口和所述第二切换阀b的第二阀口连通,;
31.若所述电动轮式矿用自卸车处于无人驾驶车斗控制模式,所述第一切换阀的第一阀口和所述第一切换阀的第三阀口连通,所述第二切换阀a的第一阀口和所述第二切换阀a的第三阀口连通,所述第二切换阀b的第一阀口和所述第二切换阀b的第三阀口连通;
32.若所述电动轮式矿用自卸车处于无人驾驶车斗控制模式,所述车斗阀组处于第一状态时所述第二切换阀a的第一阀口输出液压油以实现车斗处于动力下降状态,所述车斗阀组处于第二状态时所述第二切换阀b的第一阀口输出液压油以实现车斗处于动力起升状态,所述车斗阀组处于第三状态时所述第二切换阀a的第一阀口和所述第二切换阀b的第一阀口连通以实现车斗处于浮动状态,所述车斗阀组处于第四状态时所述车斗阀组的回油阀口输出液压油以实现车斗处于保持状态。
33.可选地,电动轮式矿用自卸车的的无人驾驶系统所述车斗阀组包括:第三切换阀,第四切换阀,第五切换阀,以及第六切换阀;
34.其中,所述第三切换阀具有第一阀口、第二阀口、第三阀口和第四阀口;若所述第三切换阀处于第一状态,所述第三切换阀的第一阀口、第二阀口、第三阀口和第四阀口均断开,若所述第三切换阀处于第二状态,所述第三切换阀第一阀口向所述第三切换阀的第三阀口连通,所述第三切换阀的第四阀口向所述第三切换阀的第二阀口导通;
35.所述第六切换阀具有第一阀口、第二阀口、第三阀口和第四阀口;若所述第六切换阀处于第一状态,所述第六切换阀的第一阀口、第二阀口、第三阀口和第四阀口均断开,若所述第六切换阀处于第二状态,所述第六切换阀第一阀口向所述第六切换阀的第四阀口连通,所述第六切换阀的第三阀口向所述第六切换阀的第二阀口导通;
36.所述第四切换阀具有第一阀口和第二阀口,若所述第四切换阀处于第一状态所述
第四切换阀的第一阀口和第二阀口导通,若所述第四切换阀处于第二状态所述第四切换阀断开;
37.所述第五切换阀具有第一阀口和第二阀口,若所述第五切换阀处于第一状态所述第五切换阀断开,若所述第五切换阀处于第二状态所述第五切换阀的第一阀口和第二阀口导通;
38.所述第三切换阀的第一阀口通过第一管路和所述第一切换阀的第三阀口连通,所述第六切换阀的第一阀口通过第二管路和所述第一管路连通;
39.所述第六切换阀的第二阀口通过第三管路和回油管路连通,所述第三切换阀的第二阀口通过第四管路和所述第三管路连通,所述第四切换阀串接在第五管路上,所述第五管路的一端和所述第一管路连通,所述第五管路的另一端和所述第三管路连通;在所述第一管路上,所述第五管路位于所述第一切换阀的第三阀口和所述第二管路之间;在所述第三管路上,所述第五管路位于所述第四管路和所述回油管路之间;
40.所述第六切换阀的第三阀口通过第六管路和所述第二切换阀b的第三阀口连通,所述第六切换阀的第四阀口通过第七管路和所述第二切换阀a的第三阀口连通;
41.所述第五切换阀的第二阀口通过第八管路和所述第三切换阀的第三阀口连通,所述第八管路的中部和所述第六管路连通,所述第五切换阀的第一阀口通过第九管路和所述第七管路连通,所述第三切换阀的第四阀口通过第十管路和所述第六管路连通,在所述第七管路上,所述第六切换阀的第四阀口、第九管路、所述第十管路、所述第二切换阀a的第三阀口依次分布。
42.可选地,电动轮式矿用自卸车的的无人驾驶系统还包括:主机,与所述主机通信连接的电子控制单元;其中,所述电子控制单元根据所述主机的指令控制所述无人驾驶车斗控制阀组。
43.可选地,电动轮式矿用自卸车的的无人驾驶系统还包括无人驾驶车轮制动锁定模块,所述无人驾驶车轮制动锁定模块包括:制动锁定电磁阀、制动锁定开关、第一手自动切换器、第一装载制动继电器、第二手自动切换器、第二装载制动继电器、第一导线、第二导线、第三导线和第四导线;
44.其中,所述第一导线的一端和所述制动锁定电磁阀电连接,所述第一导线的另一端用于和电控箱电连接;所述第二导线的一端用于和辅助箱控制模块通信连接,所述第二导线的另一端用于和电控箱通信连接;所述制动锁定开关通过其第一输入端和第一输出端串接在所述第一导线上,所述制动锁定开关通过其第二输入端和第二输出端串接在所述第二导线上;
45.所述第三导线的一端和所述制动锁定电磁阀电连接,所述第三导线的另一端用于和所述电控箱电连接;所述第四导线的一端用于和所述辅助箱控制模块通信连接,所述第四导线的另一端用于和所述电控箱通信连接;所述第一装载制动继电器串接在所述第三导线上,所述第二装载制动继电器串接在所述第四导线上;
46.所述第一手自动切换器切换所述第一导线和所述第三导线用于串接在所述电控箱和所述制动锁定电磁阀之间,所述第二手自动切换器切换所述第二导线和所述第四导线用于串接在所述辅助箱控制模块和所述电控箱之间;
47.若电动轮式矿用自卸车采用人工制动锁定,则所述第一手自动切换器切换至所述
第一导线串接在所述电控箱100和所述制动锁定电磁阀之间的状态,所述第二手自动切换器切换至所述第二导线串接在所述辅助箱控制模块和所述电控箱之间的状态;
48.若电动轮式矿用自卸车采用无人制动锁定,则所述第一手自动切换器切换至所述第三导线串接在所述电控箱和所述制动锁定电磁阀之间的状态,所述第二手自动切换器切换至所述第四导线串接在所述辅助箱控制模块和所述电控箱之间的状态;
49.所述第一装载制动继电器和所述第二装载制动继电器所处状态相同。
50.可选地,所述第一手自动切换器和所述第二手自动切换器均为手自动切换继电器;
51.所述第一手自动切换器的输入接口用于和所述电控箱电连接,所述第一手自动切换器的第一输出接口和所述第一导线电连接,所述第一手自动切换器的第二输出接口和所述第三导线电连接;
52.所述第三导线和所述第一导线电连接,且所述第三导线和所述第一导线的连接位置位于所述制动锁定电磁阀和所述制动锁定开关的第一输出端之间;
53.所述第二手自动切换器的输入接口用于和所述辅助箱控制器电连接,所述第二手自动切换器的第一输出接口和所述第二导线电连接,所述第二手自动切换器的第二输出接口和所述第四导线电连接;
54.所述第四导线和所述第二导线电连接,且所述第四导线和所述第二导线的连接位置位于所述电控箱和所述制动锁定开关的第二输出端之间。
55.可选地,电动轮式矿用自卸车的的无人驾驶系统还包括:主机,与所述主机通信连接的电子控制单元;
56.其中,所述第一手自动切换器、所述第二手自动切换器、所述第一装载制动继电器和所述第二装载制动继电器的通信接口均和所述电子控制单元通信连接,所述电子控制单元根据所述主机的指令控制所述第一手自动切换器、所述第二手自动切换器、所述第一装载制动继电器和所述第二装载制动继电器。
57.可选地,电动轮式矿用自卸车的的无人驾驶系统还包括无人驾驶发动机控制模块,所述无人驾驶发动机控制模块包括:电源、钥匙开关、电源继电器、电控箱、点火继电器、熄火继电器、点火线路、手自动切换单元和电子控制单元;
58.其中,所述电源通过第一供电导线给所述钥匙开关供电,所述熄火继电器串接在所述第一供电导线上并控制所述第一供电导线的通断;
59.所述电源通过第二供电导线给所述电控箱供电,所述电源继电器串接在所述第二供电导线上并控制所述第二供电导线的通断;
60.所述电源继电器的通信接口和所述钥匙开关的供电档位通信连接,且所述钥匙开关处于所述供电档位时所述电源继电器导通所述第二供电导线;
61.所述电子控制单元和所述钥匙开关的供电档位通信连接以及获取所述钥匙开关是否处于所述供电档位;
62.所述手自动切换单元具有无人驾驶档位和人工驾驶档位,所述电子控制单元和所述手自动切换单元电连接并获取所述手自动切换单元所处的档位;
63.所述点火继电器的通信接口和所述熄火继电器的通信接口均和所述电子控制单元通信连接;
64.所述点火继电器串接在自动点火线路上,所述自动点火线路的一端和所述点火线路电连接,所述自动点火线路的另一端和所述钥匙开关的供电档位电连接,所述点火线路和所述钥匙开关的点火档位电连接;
65.若所述手自动切换单元处于无人驾驶档,且所述钥匙开关处于所述供电档位,所述电子控制单元控制所述点火继电器导通所述自动点火线路。
66.可选地,所述无人驾驶发动机控制模块还包括无人驾驶系统电源,所述电源用于给所述无人驾驶系统电源和所述电子控制单元供电;
67.和/或,所述电动轮式矿用自卸车的无人驾驶系统还包括主机,所述电子控制单元和所述主机通信连接,且所述电子控制单元根据所述主机的指令控制所述点火继电器和所述熄火继电器的通断;
68.和/或,所述手自动切换单元包括至少一个模式选择开关和/或至少一个模式选择按钮,每个所述模式选择开关具有无人驾驶档和人工驾驶档,每个所述模式选择按钮具有无人驾驶档和人工驾驶档。
69.可选地,电动轮式矿用自卸车的的无人驾驶系统还包括无人驾驶档位切换模块,所述无人驾驶档位切换模块包括:方向选择开关、方向选择继电器、电控箱和电子控制单元;
70.其中,所述方向选择开关具有驻车通信接口、倒车通信接口、空档通信接口和前进通信接口,所述电子控制单元具有自动驻车通信接口、自动倒车通信接口、自动空档通信接口和自动前进通信接口;
71.所述方向选择继电器具有第一空档输入接口、第二空档输入接口、第一驻车输入接口、第二驻车输入接口、第一倒车输入接口、第二倒车输入接口、第一前进输入接口、第二前进输入接口、第一输出接口、第二输出接口、第三输出接口、第四输出接口和切换输入接口;
72.其中,所述空档通信接口和所述第一空档输入接口通信连接,所述驻车通信接口和所述第一驻车输入接口通信连接,所述倒车通信接口和所述第一倒车输入接口通信连接,所述前进通信接口和所述第一前进输入接口通信连接;
73.所述自动空档通信接口和所述第二空档输入接口通信连接,所述自动驻车通信接口和所述第二驻车输入接口通信连接,所述自动倒车通信接口和所述第二倒车输入接口通信连接,所述自动前进通信接口和所述第二前进输入接口通信连接;若所述方向选择继电器处于第一状态,所述第一输出接口和第一空档输入接口通信连接、所述第二输出接口和第一驻车输入接口通信连接、所述第三输出接口和所述第一倒车输入接口通信连接、所述第四输出接口和所述第一前进输入接口通信连接;
74.若所述方向选择继电器处于第二状态,所述第一输出接口和所述第二空档输入接口通信连接、所述第二输出接口和所述第二驻车输入接口通信连接、所述第三输出接口和所述第二倒车输入接口通信连接、所述第四输出接口和所述第二前进输入接口通信连接;
75.所述电子控制单元和所述切换输入接口通信连接以控制所述方向选择继电器的状态;
76.所述电子控制单元和所述方向选择开关通信连接以采集所述方向选择开关的状态,所述电子控制单元和所述电控箱信号连接以采集所述电控箱所发出的档位信号。
77.可选地,电动轮式矿用自卸车的的无人驾驶系统还包括主机,所述电子控制单元和所述主机通信连接;
78.其中,若所述方向选择开关处于驻车档,所述电子控制单元根据所述主机的指令向所述方向选择继电器输入档位信号;若所述方向选择开关未处于所述驻车档,所述电子控制单元根据所述方向选择开关所处的档位向所述方向选择继电器输入档位信号。
79.可选地,电动轮式矿用自卸车的的无人驾驶系统还包括无人驾驶发动机速度控制模块,所述无人驾驶发动机速度控制模块包括:油门踏板、刹车踏板、切换继电器、电子控制单元、电控箱;
80.其中,所述切换继电器具有通信接口、第一加速输入接口、第二加速输入接口、第一减速输入接口、第二减速输入接口、加速输出接口、减速输出接口;
81.所述第一加入输入接口和所述油门踏板通信连接,所述第一减速输入接口和所述刹车踏板通信连接;所述第二加速输入接口、所述第二减速输入接口均和所述电子控制单元通信连接;所述加速出口和所述减速出口均和所述电控箱通信连接;
82.若所述切换继电器处于第一状态,所述第一加速输入接口和所述加速输出接口电连接、所述第一减速输入接口和所述减速输出接口电连接;若所述切换继电器处于第二状态,所述第二加速输入接口和所述加速输出接口电连接、所述第二减速输入接口和所述减速输出接口电连接;所述电子控制单元和所述切换继电器的通信接口连接以控制所述切换继电器的状态。
83.可选地,电动轮式矿用自卸车的的无人驾驶系统还包括主机,所述电子控制单元和所述主机通过网线通信连接,所述电子控制单元根据所述主机的指令向所述电控箱发送信号;所述电子控制单元与所述油门踏板通信连接以采集所述油门踏板的状态并反馈给主机,所述电子控制单元与所述刹车踏板通信连接以采集所述刹车踏板的状态并反馈给所述主机;
84.和/或,所述刹车踏板的输出端通过减速线路和所述第一减速输入接口通信连接,所述电子控制单元通过分压线路和所述减速线路通信连接,所述分压线路串接有分压电阻。
85.可选地,电动轮式矿用自卸车的的无人驾驶系统还包括无人驾驶喇叭控制模块,所述无人驾驶喇叭控制模块包括:喇叭按钮、第一喇叭继电器、第二喇叭继电器和电子控制单元;
86.其中,所述第一喇叭继电器和第二喇叭继电器并联设置,且所述第一喇叭继电器所在的支路和所述第二喇叭继电器所在的支路均与喇叭串联;
87.所述喇叭按钮和所述第一喇叭继电器的通信接口连接以控制所述第一喇叭继电器的通断,所述电子控制单元和所述第二喇叭继电器的通信接口连接以控制所述第二喇叭继电器的通断。
88.可选地,电动轮式矿用自卸车的的无人驾驶系统还包括主机,所述电子控制单元和所述主机通信连接,所述电子控制单元根据所述主机的指令控制所述第二喇叭继电器的通断。
89.可选地,电动轮式矿用自卸车的的无人驾驶系统还包括无人驾驶车灯控制模块,所述无人驾驶车灯控制模块包括:近光灯继电器、远光灯继电器、近远光灯切换开关、前灯
开关、转向灯信号开关和电子控制单元;其中,所述前灯开关和所述近光灯继电器的通信接口连接以控制所述近光灯继电器的通断,所述近光灯继电器串接在近光灯线路上,若所述近光灯继电器导通则近光灯打开,若所述近光灯继电器断开则所述近光灯关闭;
90.所述前灯开关通过所述近远光灯切换开关和所述远光灯继电器的通信接口连接以控制所述远光灯继电器的通断,所述远光灯继电器串接在远光灯线路上,若所述远光灯继电器导通则远光灯打开,若所述远光灯继电器断开则所述远光灯关闭;
91.所述转向灯信号开关用于控制左转向灯、左轮廓灯、右转向灯和右轮廓灯的开闭;
92.所述电子控制单元和所述近光灯继电器的通信接口连接以控制所述近光灯继电器的通断,所述电子控制单元和所述远光灯继电器的通信接口连接以控制所述远光灯继电器的通断,所述电子控制单元和所述左转向灯连接以控制所述左转向灯的开闭,所述电子控制单元和所述左轮廓灯连接以控制所述左轮廓灯的开闭,所述电子控制单元和所述右转向灯连接以控制所述右转向灯的开闭,所述电子控制单元和所述右轮廓灯连接以控制所述右轮廓灯的开闭。
93.可选地,电动轮式矿用自卸车的的无人驾驶系统还包括主机,所述电子控制单元和所述主机通信连接,所述电子控制单元根据所述主机的指令控制所述近光灯继电器的通断和远光灯继电器的通断、所述电子控制单元根据所述主机的指令控制所述左转向灯和所述左轮廓灯的开闭、以及所述电子控制单元根据所述主机的指令控制所述右转向灯和所述右轮廓灯的开闭。
94.可选地,电动轮式矿用自卸车的的无人驾驶系统还包括无人驾驶警示灯控制模块,所述无人驾驶警示灯控制模块包括:三个警示灯组、警示灯继电器和电子控制单元;
95.其中,每个所述警示灯组包括至少一个警示灯,一个所述警示灯组的警示灯为红灯、一个所述警示灯组的警示灯为黄灯,另一个所述警示灯组的警示灯为蓝灯,所述警示灯继电器和所述警示灯组一一对应;
96.所述警示灯继电器串接在与其对应的所述警示灯组和所述电子控制单元之间以控制所述警示灯组中每个灯的开闭,且所电子控制单元和所述警示灯继电器的通信接口连接以控制所述警示灯继电器的通断;
97.若所述电动轮式矿用自卸车处于无人驾驶模式,所述蓝灯闪;若所述电动轮式矿用自卸车处于人工驾驶模式,所述黄灯闪;若所述电动轮式矿用自卸车处于故障模式,所述红灯亮。
98.可选地,电动轮式矿用自卸车的的无人驾驶系统还包括主机,所述主机和所述电子控制单元通信连接,所述电子控制单元根据所述主机发出的指令控制相应的所述警示灯继电器的通断以及向相应的所述警示灯继电器发出信号以控制相应的警示灯组。
99.可选地,电动轮式矿用自卸车的的无人驾驶系统还包括:ac驱动停止开关,超控开关,电控箱,ac驱动停止继电器,超控继电器,和电子控制单元;
100.其中,所述ac驱动停止继电器和所述ac驱动停止开关并联设置,所述ac驱动停止继电器所在支路和所述ac驱动停止开关所在支路均与所述电控箱通信连接,所述电子控制单元和所述ac驱动停止继电器的通信接口连接以控制所述ac驱动停止继电器的通断;
101.所述超控继电器和所述超控开关并联设置,所述超控继电器所在支路和所述超控开关所在支路均与所述电控箱通信连接,所述电子控制单元和所述超控继电器的通信接口
连接以控制所述超控继电器的通断。
102.可选地,电动轮式矿用自卸车的的无人驾驶系统还包括主机,所述电子控制单元和所述主机通信连接,所述电子控制单元根据所述主机的指令控制所述ac驱动停止继电器的通断和所述超控继电器的通断。
103.基于上述提供的电动轮式矿用自卸车的无人驾驶系统,本发明还提供了一种电动轮式矿用自卸车,该电动轮式矿用自卸车包括上述任一项所述的电动轮式矿用自卸车的无人驾驶系统。
104.可选地,所述电动轮式矿用自卸车为小松电动轮式矿用自卸卡车,所述小松电动轮式矿用自卸卡车为小松830e电动轮式矿用自卸卡车或小松930e电动轮式矿用自卸卡车。
105.本发明提供的电动轮式矿用自卸车的无人驾驶系统中,上述电动轮式矿用自卸车的无人驾驶系统中,通过增设无人驾驶前制动阀组和无人驾驶后制动阀组,通过无人驾驶前制动阀组、无人驾驶后制动阀组、前制动蓄能器、后制动蓄能器、踏板制动阀、前继动阀、后继动阀的配合,既能实现无人驾驶制动,也能实现人工驾驶制动;通过切换无人驾驶前制动阀组和无人驾驶后制动阀组的状态,实现了在人工驾驶制动和无人驾驶制动之间进行切换,满足了既能人工驾驶也能无人驾驶的需求;而且,通过增加无人驾驶前制动阀组和无人驾驶后制动阀组即可实现,对原车的改动较小,降低了改造成本,便于推广和使用。
附图说明
106.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据提供的附图获得其他的附图。
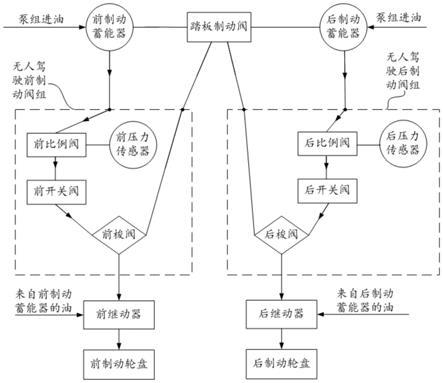
107.图1为本发明实施例提供的电动轮式矿用自卸车的无人驾驶系统中液压制动的原理图;
108.图2为本发明实施例提供的电动轮式矿用自卸车的无人驾驶系统中人工驾驶制动的原理框图;
109.图3为本发明实施例提供的电动轮式矿用自卸车的无人驾驶系统中无人驾驶制动的原理框图;
110.图4为本发明实施例提供的电动轮式矿用自卸车的无人驾驶系统中液压转向的原理图;
111.图5为本发明实施例提供的电动轮式矿用自卸车的无人驾驶系统中车斗控制的原理框图;
112.图6为本发明实施例提供的电动轮式矿用自卸车的无人驾驶系统中人工控制车斗的原理框图;
113.图7为本发明实施例提供的电动轮式矿用自卸车的无人驾驶系统中车斗控制阀的示意图;
114.图8为本发明实施例提供的电动轮式矿用自卸车的无人驾驶系统中无人驾驶车轮制动锁定模块的原理图;
115.图9为本发明实施例提供的电动轮式矿用自卸车的无人驾驶系统中无人驾驶发动
机控制模块的原理图;
116.图10为本发明实施例提供的电动轮式矿用自卸车的无人驾驶系统中无人驾驶档位切换模块的原理图;
117.图11为本发明实施例提供的电动轮式矿用自卸车的无人驾驶系统中无人驾驶发动机速度控制模块的原理图;
118.图12为本发明实施例提供的电动轮式矿用自卸车的无人驾驶系统中无人驾驶喇叭控制模块的原理图;
119.图13为本发明实施例提供的电动轮式矿用自卸车的无人驾驶系统中无人驾驶车灯控制模块的原理图;
120.图14为本发明实施例提供的电动轮式矿用自卸车的无人驾驶系统中无人驾驶警示灯控制模块的原理图;
121.图15为本发明实施例提供的电动轮式矿用自卸车的无人驾驶系统中ac驱动停止开关和超控开关的控制原理图;
122.图16为本发明实施例提供的电动轮式矿用自卸车的无人驾驶系统的框图。
123.图1中:前制动蓄能器11,后制动蓄能器12,前继动阀13,后继动阀14,无人驾驶前制动阀组15,无人驾驶后制动阀组16,踏板制动阀17,分油阀组18;
124.图4中:转向器21,流量放大器22,转向梭阀23,转向单向阀24,r管道25,l管道26,t管道27,ls管道a28,p管道29,ls管道b210,辅助管道211;
125.图7中:第五切换阀e1,第六切换阀e2,第三切换阀e3,第四切换阀e4,第二切换阀ae51,第二切换阀b e52,第一切换阀e6,单向阀e7,泄压阀e8,第一管路31,第二管路32,第三管路33,第四管路34,第五管路35,第六管路36,第七管路37,第八管路38,第九管路39,第十管路310,第十一管路311,回油管路312,泵组进油管313,起升先导阀第一阀口314,起升先导阀第二阀口315,起升先导阀第三阀口316,起升阀第一阀口317,起升阀第二阀口318;
126.图8中:制动锁定电磁阀41,制动锁定开关42,第一导线43,第二导线44,第三导线45,第四导线46,第一装载制动继电器47,第二装载制动继电器48,第一手自动切换器49,第二手自动切换器410;
127.图9中:模式选择按钮51,第一供电导线52,钥匙开关53,关闭档位53a,供电档位53b,点火档位53c,第二供电导线54,电源继电器55,模式选择开关56,点火线路57,点火继电器58,熄火继电器59,自动点火线路510,无人驾驶系统电源511;
128.图10中:方向选择开关61,方向选择继电器62,驻车通信接口p,倒车通信接口r,空档通信接口n,前进通信接口d,自动驻车通信接口p’,自动倒车通信接口r’,自动空档通信接口n’,自动前进通信接口d’,第一空档输入接口621,第一驻车输入接口622,第一倒车输入接口623,第一前进输入接口624,第二空档输入接口625,第二驻车输入接口626,第二倒车输入接口627,第二前进输入接口628,第一输出接口629,第二输出接口6210,第三输出接口6211,第四输出接口6212,切换输入接口6213,接地接口6214;
129.图11中:油门踏板71,刹车踏板72,加速线路73,切换继电器74,减速线路75,分压线路76,分压电阻77;
130.图12中:喇叭按钮81,第一喇叭继电器82,第二喇叭继电器83,喇叭84;
131.图13中:前灯开关91,近光灯继电器92,近光灯93,电压输入线94,近远光灯切换开
关95,远光灯96,远光灯继电器97,左转向灯98,左轮廓灯99,右转向灯910,右轮廓灯911,转向灯信号开关912;
132.图14中:警示灯继电器01,红灯02,黄灯03,蓝灯04;
133.图15中:ac驱动停止开关001,ac驱动停止继电器002,超控开关003,超控继电器004;
134.图8-15中:电控箱100,辅助箱控制模块200,电子控制单元300,电源400。
具体实施方式
135.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
136.如图1-16所示,本实施例所提供的技术方案通过液压系统和电气系统改造使电动轮式矿用自卸车具备无人驾驶的功能,特别是能够实现小松电动轮式矿用自卸车具备无人驾驶的功能,例如小松830e电动轮式矿用自卸车具备无人驾驶的功能、小松930e电动轮式矿用自卸车具备无人驾驶的功能。而且,本实施例所提供的技术方案既能满足无人驾驶操作,也能满足人工驾驶操作。
137.小松电动轮式矿用自卸车均为大型矿卡,其动力源为柴油发动机,直接连接电驱动系统和液压主泵。通过牵引马达和直接安装在两个后轮总成上的行星齿轮驱动系统将电能转变成机械能。小松电动轮式矿用自卸车主要包括电推进系统(驱动系统)、转向系统、制动系统、举升系统和整车电气控制系统。矿卡,即为非公路矿用自卸车。
138.由于每辆电动轮式矿用自卸车的性能参数各不相同,无人驾驶改造方案应尽量减少对原车系统产生影响。本实施例所提供的技术方案所提供的改造主要包括:液压制动控制、转向控制、车斗控制、装载制动控制、发动机起动控制、发动机熄火控制、档位切换控制、发动机加减速控制、喇叭控制、车灯控制、警示灯控制、ac驱动停止控制、超控控制、以及故障采集。
139.自动驾驶的路径规划等驾驶决策是由传感器根据实际的道路交通情况进行识别进而得出,这些信号都是电信号,这就需要对原车底盘进行改造以适用于自动驾驶。将原车底盘经过相关液压控制阀组及相应的电控线路改造使其可以通过无人驾驶操作信号进行控制这一过程称之为线控改造。本实施例所提供的技术方案主要涉及线控改造,对于自动驾驶的路径规划并未涉及。
140.原车系统中,档位切换、油门踏板71、刹车踏板72等信号直接进入电控箱100内,本实施例提供的技术方案是:由电子控制单元300输出信号以模拟档位切换、油门踏板71、刹车踏板72的信号,电控箱100执行相应操作。
141.本发明实施例提供的电动轮式矿用自卸车的无人驾驶系统中,通过对原车加装制动系统、转向系统、车斗控制系统相关液压控制阀组及相应的电控线路使其同时具备液控及电控功能,以满足无人驾驶操作及人工驾驶操作的要求。具体地,在液压制动相关管路上增加无人驾驶前制动阀组15和无人驾驶后制动阀组16,在车斗控制液压管路上增加无人驾驶车斗控制阀组35,在将原转向器替换为电控液压转向器,同时在转向油缸上增加转角传
感器以实时反馈转向油缸的转角,同时增加相应液压阀组控制电路以达到对制动、车斗及转向的电控要求。
142.为了实现无人驾驶制动、以及在人工驾驶制动和无人驾驶制动之间进行切换,满足既能人工驾驶也能无人驾驶的需求,本实施例提供的电动轮式矿用自卸车的无人驾驶系统包括无人驾驶液压制动模块。上述无人驾驶液压制动模块用于工作制动。
143.液压制动主要分为:工作制动、停车制动、制动锁定和低压自动制动。上述工作制动即行车制动,工作制动采用全液压湿式摩擦片制动,前后桥同时施加。在卡车速度低于8英里/时使用,用于卡车停止。在车辆坡道起步、紧急情况下也可用于辅助。当卡车停止时使用停车制动,停车制动处于常闭状态。行车时通过液压系统打开停车制动,停车制动位于后桥。上述制动锁定即装载制动,制动锁定用于卡车装载时使用,通过后桥行车制动盘施加制动力。上述低压自动制动是指当压力开关检测到制动蓄能器的压力低于约127bar时,系统自动施加制动。上述低压自动制动是指通过前后桥行车制动盘施加制动力。
144.如图1-3所示,无人驾驶液压制动模块包括:前制动蓄能器11、后制动蓄能器12、踏板制动阀17、前继动阀13、后继动阀14、无人驾驶前制动阀组15、以及无人驾驶后制动阀组16。其中,无人驾驶前制动阀组15、以及无人驾驶后制动阀组16为在原车上增加的阀组,前制动蓄能器11、后制动蓄能器12、踏板制动阀17、前继动阀13、后继动阀14均为原车现有。
145.上述无人驾驶液压制动模块,分油阀组18用于给前制动蓄能器11、后制动蓄能器12以及踏板制动阀17供油。另外,制动踏板阀17、前继动阀13、后继动阀14、无人驾驶前制动阀组15和无人驾驶后制动阀组16均具有回油口,上述回油口均和分油阀组18连通,以保证回油。
146.上述踏板制动阀17的第一进阀口、前继动阀13的第一进阀口均和前制动蓄能器11的出阀口连通,踏板制动阀17的第二进阀口、后继动阀14的第一进阀口均和后制动蓄能器12的出阀口连通。
147.上述无人驾驶前制动阀组15具有前制动第一阀口、前制动第二阀口、前制动第三阀口,前制动第一阀口和前制动蓄能器11的出油口连通,前制动第二阀口和踏板制动阀17的前制动出阀口连通,前制动第三阀口和前继动阀13的第二进阀口连通。其中,无人驾驶前制动阀组15处于第一状态,前制动第一阀口和前制动第三阀口连通;无人驾驶前制动阀组15处于第二状态,前制动第二阀口和前制动第三阀口连通。
148.上述无人驾驶后制动阀组16具有后制动第一阀口、后制动第二阀口、后制动第三阀口,后制动第一阀口和后制动蓄能器12的出油口连通,后制动第二阀口和踏板制动阀17的后制动出阀口连通,后制动第三阀口和后继动阀14的第二进阀口连通。其中,无人驾驶后制动阀组16处于第一状态,后制动第一阀口和后制动第三阀口连通;无人驾驶后制动阀组16处于第二状态,后制动第二阀口和后制动第三阀口连通。
149.若电动轮式矿用自卸车采用无人驾驶制动,前制动第一阀口和前制动第三阀口连通,后制动第一阀口和后制动第三阀口连通,此时,无人驾驶前制动阀组15和无人驾驶后制动阀组16均处于第一状态;若电动轮式矿用自卸车采用人工驾驶制动,前制动第二阀口和前制动第三阀口连通,后制动第二阀口和后制动第三阀口连通,无人驾驶前制动阀组15和无人驾驶后制动阀组16均处于第二状态。
150.上述电动轮式矿用自卸车的无人驾驶系统中,通过增设无人驾驶前制动阀组15和
无人驾驶后制动阀组16,通过无人驾驶前制动阀组15、无人驾驶后制动阀组16、前制动蓄能器11、后制动蓄能器12、踏板制动阀17、前继动阀13、后继动阀14的配合,既能实现无人驾驶制动,也能实现人工驾驶制动;通过切换无人驾驶前制动阀组15和无人驾驶后制动阀组16的状态,实现了在人工驾驶制动和无人驾驶制动之间进行切换,满足了既能人工驾驶也能无人驾驶的需求;而且,通过增加无人驾驶前制动阀组15和无人驾驶后制动阀组16即可实现,对原车的改动较小,降低了改造成本,便于推广和使用。
151.对于上述无人驾驶前制动阀组15和无人驾驶后制动阀组16的具体结构,根据实际需要选择。可选地,无人驾驶前制动阀组15包括:前比例阀、前开关阀、前梭阀、以及检测前比例阀内压力的前压力传感器,无人驾驶后制动阀组16包括:后比例阀、后开关阀、后梭阀、以及检测后比例阀内压力的后压力传感器。
152.上述前比例阀的第一阀口为前制动第一阀口,前比例阀的第二阀口和前开关阀的第一阀口连通,前开关阀的第二阀口和前梭阀的第一阀口连通,前梭阀的第二阀口为前制动第二阀口,前梭阀的第三阀口为前制动第三阀口。
153.上述后比例阀的第一阀口为后制动第一阀口,后比例阀的第二阀口和后开关阀的第一阀口连通,后开关阀的第二阀口和后梭阀的第一阀口连通,后梭阀的第二阀口为后制动第二阀口,后梭阀的第三阀口为后制动第三阀口。
154.可以理解的是,前梭阀处于第一状态,前梭阀的第一阀口和第三阀口连通;前梭阀处于第二状态,前梭阀的第二阀口和第三阀口连通。后梭阀处于第一状态,后梭阀的第一阀口和第三阀口连通;后梭阀处于第二状态,后梭阀的第二阀口和第三阀口连通;前梭阀和后梭阀同时处于第一状态或第二状态。
155.若电动轮式矿用自卸车采用无人驾驶制动,前梭阀的第一阀口连通和前梭阀的第三阀口连通,后梭阀的第一阀口和后梭阀的第三阀口连通;若电动轮式矿用自卸车采用人工驾驶制动,前梭阀的第二阀口连通和前梭阀的第三阀口连通,后梭阀的第二阀口和后梭阀的第三阀口连通;若电动轮式矿用自卸车采用无人驾驶制动和人工驾驶制动,前梭阀的第一阀口和前梭阀的第二阀口中压力较大的一者和前梭阀的第三阀口连通,后梭阀的第一阀口和后梭阀的第二阀口中压力较大的一者和后梭阀的第三阀口连通。
156.为了便于控制,上述前比例阀、前开关阀、前梭阀、后比例阀、后开关阀和后梭阀均为电磁阀。具体地,若每个电磁阀均处于断电状态,电动轮式矿用自卸车处于无人驾驶制动状态、或电动轮式矿用自卸车同时处于无人驾驶制动状态和人工驾驶状态;若前开关阀和后开关阀均处于通电状态,电动轮式矿用自卸车仅处于人工驾驶制动状态。
157.若每个电磁阀均处于断电状态,且电动轮式矿用自卸车处于无人驾驶制动状态,比例阀调至最大开度,无人驾驶前制动阀组15和无人驾驶后制动阀组16均输出全压力制动,前车轮和后车轮均处于抱死状态;若前开关阀和后开关阀均处于通电状态,电动轮式矿用自卸车处于人工驾驶制动状态;若前开关阀和后开关阀均处于断电状态且电动轮式矿用自卸车处于自动驾驶制动状态,前比例阀和后比例阀均由控制器控制并根据控制器的控制指令输出制动压力。
158.进一步地,上述电动轮式矿用自卸车的无人驾驶系统还包括:主机,与主机通信连接的电子控制单元300;其中,电子控制单元300根据主机的指令控制无人驾驶前制动阀组15和无人驾驶后制动阀组16。具体地,主机发出无人驾驶制动的指令,电子控制单元300控
制无人驾驶前制动阀组15和无人驾驶后制动阀组16均处于第一状态;主机发出人工驾驶制动的指令,电子控制单元300控制无人驾驶前制动阀组15和无人驾驶后制动阀组16均处于第二状态。
159.若上述无人驾驶前制动阀组15包括前比例阀,无人驾驶后制动阀组16包括后比例阀,则电子控制单元300根据主机的指令控制前比例阀和后比例阀的制动压力。在液压制动作用时,要求实施100%电制动。
160.为了实现无人驾驶控制转向、以及在人工驾驶控制转向和无人驾驶控制转向之间进行切换,以满足既能人工驾驶也能无人驾驶的需求,本实施例提供的电动轮式矿用自卸车的无人驾驶系统包括无人驾驶液压转向模块。如图4所示,该无人驾驶液压转向模块包括:转向器21、流量放大器22以及转角传感器,其中,转向器21为电控液压转向器,转角传感器用于检测转向油缸的转角。上述转向器21通过流量放大器22向转向油缸输入液压油。上述无人驾驶液压转向模块中,流量放大器22为原车流量放大器。
161.上述转向器21在原有方向盘输入的基础上增加电控比例液压系统。可通过电控比例系统输出按比例的液压油到流量放大器22,并通过转角传感器做转角闭环控制。此外,方向盘输入部分与现有车相同,用于司机驾驶。
162.上述电控液压转向器可为danfoss电控液压转向器或其他类型,根据实际需要选择;上述转角传感器可为磁致伸缩位移传感器,磁致伸缩位移传感器设置在转向油缸内。当然,也可选择上述转角传感器为其他类型,例如拉线位移传感器,拉线位移传感器需要设置在转向油缸的外部。
163.上述转向器21无优先阀,转向器21的反馈油路不会产生控制压力,若转向器21的反馈油路直接和原车的流量放大器22安装,会导致不匹配,需要增加反馈控制压力。而且转向器21需要获取动态的反馈油路控制压力。基于此,如图4所示,上述转向器21通过转向管组向流量放大器22输入液压油,转向管组包括:转向梭阀23、转向单向阀24、r管道25、l管道26、t管道27、ls管道、p管道29和辅助管道211。
164.上述转向器21的r阀口和流量放大器22的r阀口通过转向r管道25连通,转向器21的l阀口和流量放大器22的l阀口通过l管道26连通,转向器21的t阀口和流量放大器22的t阀口通过t管道27连通,转向器21的ls阀口和流量放大器22的ls阀口通过ls管道连通,转向器21的p阀口和流量放大器22的p阀口通过p管道29连通。
165.上述转向梭阀23的第一阀口和r管道25连通,转向梭阀23的第二阀口和l管道26连通,转向梭阀23的第三阀口和转向单向阀24的第一阀口连通,转向单向阀24的第二阀口和ls管道连通,转向单向阀24仅能自转向梭阀23向ls管道导通。
166.上述p管道29和ls管道通过辅助管道211连通,且辅助管道211在ls管道上的连通位置位于转向单向阀24和流量放大器22之间。
167.可以理解的是,上述转向梭阀23处于第一状态时,转向梭阀23的第一阀口和第三阀口连通;转向梭阀23处于第二状态时,转向梭阀23的第二阀口和第三阀口连通。
168.为了便于安装,上述转向梭阀23的第一阀口和r管道25通过三通阀连通,转向梭阀23的第二阀口和l管道26通过三通阀连通;上述ls管道包括ls管道a28和ls管道b210,ls管道a28的一端和转向器21的ls阀口的连通,ls管道b210的一端和流量放大器22的ls阀口连通,ls管道a28的另一端、ls管道b210的另一端和转向单向阀24的第二阀口通过三通阀连
通;辅助管道211的一端通过三通阀和p管道29连通,辅助管道211的另一端通过三通阀和ls管道b210连通。
169.本实施例中,考虑从r管道25、l管道26和p管道29中获取负载压力用于流量放大器22。通过转向梭阀23和转向器21的ls阀口产生控制压力和泄压。
170.进一步地,上述电动轮式矿用自卸车的无人驾驶系统,其特征在于,还包括通信连接的主机和转向控制器,转向控制器根据主机的指令控制转向器21向流量放大器22输出设定比例的液压油以控制转向油缸旋转设定转角。
171.可以理解的是,转向器21、转向管组和转角传感器均和转向控制器通信连接。
172.上述电动轮式矿用自卸车的无人驾驶系统中国,转向控制在无人驾驶模式下兼容人工驾驶操作。
173.为了实现无人驾驶控制车斗、以及在人工驾驶控制车斗和无人驾驶控制车斗之间进行切换,以满足既能人工驾驶也能无人驾驶的需求,本实施例提供的电动轮式矿用自卸车的无人驾驶系统还包括无人驾驶车斗液压控制模块,如图5和图6所示,无人驾驶车斗液压控制模块包括:起升阀、起升先导阀和无人驾驶车斗控制阀组。其中,无人驾驶车斗控制阀组为新增阀组,起升阀为原车的阀,起升先导阀为原车的阀。
174.如图5-7所示,上述无人驾驶车斗控制阀组包括:第一切换阀e6、车斗阀组、第二切换阀ae51和第二切换阀b e52。
175.上述第一切换阀e6的第一阀口用于供泵组进油,第一切换阀e6的第二阀口和起升先导阀的起升先导阀第一阀口314连通,第一切换阀e6的第三阀口和车斗阀组的第一阀口连通。
176.上述第二切换阀ae51的第一阀口和起升阀的起升阀第一阀口317连通,第二切换阀ae51的第二阀口和起升先导阀的起升先导阀第二阀口315连通,第二切换阀ae51的第三阀口和车斗阀组的第二阀口连通。
177.上述第二切换阀be52的第一阀口和起升阀的起升阀第二阀口318连通,第二切换阀be52的第二阀口和起升先导阀的起升先导阀第三阀口316连通,第二切换阀be52的第三阀口和车斗阀组的第三阀口连通。
178.若电动轮式矿用自卸车处于人工驾驶车斗控制模式,第一切换阀e6的第一阀口和第一切换阀e6的第二阀口连通,第二切换阀ae51的第一阀口和第二切换阀ae51的第二阀口连通,第二切换阀be52的第一阀口和第二切换阀be52的第二阀口连通;
179.若电动轮式矿用自卸车处于无人驾驶车斗控制模式,第一切换阀e6的第一阀口和第一切换阀e6的第三阀口连通,第二切换阀ae51的第一阀口和第二切换阀ae51的第三阀口连通,第二切换阀be52的第一阀口和第二切换阀be52的第三阀口连通;
180.若电动轮式矿用自卸车处于无人驾驶车斗控制模式,车斗阀组处于第一状态时第二切换阀ae51的第一阀口输出液压油以实现车斗处于动力下降状态,车斗阀组处于第二状态时第二切换阀be52的第一阀口输出液压油以实现车斗处于动力起升状态,车斗阀组处于第三状态时第二切换阀ae51的第一阀口和第二切换阀be52的第一阀口连通以实现车斗处于浮动状态,车斗阀组处于第四状态时车斗阀组的回油阀口输出液压油以实现车斗处于保持状态。
181.可以理解是,车斗阀组的回油阀口和回油管路312连通。上述第一切换阀e6的第一
阀口和泵组进油管313连通以用于供泵组进油。
182.为了便于控制车斗处于所需的状态,可选择上述车斗阀组包括:第三切换阀e3,第四切换阀e4,第五切换阀e1,以及第六切换阀e2,如图7所示。
183.上述第三切换阀e3具有第一阀口、第二阀口、第三阀口和第四阀口;若第三切换阀e3处于第一状态,第三切换阀e3的第一阀口、第二阀口、第三阀口和第四阀口均断开,若第三切换阀e3处于第二状态,第三切换阀e3第一阀口向第三切换阀e3的第三阀口连通,第三切换阀e3的第四阀口向第三切换阀e3的第二阀口导通。
184.上述第六切换阀e2具有第一阀口、第二阀口、第三阀口和第四阀口;若第六切换阀e2处于第一状态,第六切换阀e2的第一阀口、第二阀口、第三阀口和第四阀口均断开,若第六切换阀e2处于第二状态,第六切换阀e2第一阀口向第六切换阀e2的第四阀口连通,第六切换阀e2的第三阀口向第六切换阀e2的第二阀口导通。
185.上述第四切换阀e4具有第一阀口和第二阀口,若第四切换阀e4处于第一状态第四切换阀e4的第一阀口和第二阀口导通,若第四切换阀e4处于第二状态第四切换阀e4断开。
186.上述第五切换阀e1具有第一阀口和第二阀口,若第五切换阀e1处于第一状态第五切换阀e1断开,若第五切换阀e1处于第二状态第五切换阀e1的第一阀口和第二阀口导通。
187.上述第三切换阀e3的第一阀口通过第一管路31和第一切换阀e6的第三阀口连通,第六切换阀e2的第一阀口通过第二管路32和第一管路31连通。
188.上述第六切换阀e2的第二阀口通过第三管路33和回油管路312连通,第三切换阀e3的第二阀口通过第四管路34和第三管路33连通,第四切换阀e4串接在第五管路35上,第五管路35的一端和第一管路31连通,第五管路35的另一端和第三管路33连通;在第一管路31上,第五管路35位于第一切换阀e6的第三阀口和第二管路32之间;在第三管路33上,第五管路35位于第四管路34和回油管路312之间。
189.上述第六切换阀e2的第三阀口通过第六管路36和第二切换阀be52的第三阀口连通,第六切换阀e2的第四阀口通过第七管路和第二切换阀ae51的第三阀口连通。
190.上述第五切换阀e1的第二阀口通过第八管路38和第三切换阀e3的第三阀口连通,第八管路38的中部和第六管路36连通,第五切换阀e1的第一阀口通过第九管路39和第七管路37连通,第三切换阀e3的第四阀口通过第十管路310和第六管路36连通,在第七管路37上,第六切换阀e2的第四阀口、第九管路39、第十管路310、第二切换阀ae51的第三阀口依次分布。
191.为了避免回流,上述车斗阀组还包括单向阀e7,单向阀e7串接在第一管路31上;在第一管路31上,单向阀e7位于第二管路32和第五管路35之间。
192.为了保证安全,上述车斗阀组还包括泄压阀e8,泄压阀e8串接在第十一管路311上,第十一管路311的一端和第七管路37连通,第十一管路311的另一端和回油管路312连通,当第七管路37内的压力大于设定值时泄压阀e8导通泄压,当第七管路37内的压力不大于设定值时泄压阀e8断开;其中,在第七管路37上,第十一管路311位于第十管路310和第二切换阀ae51的第三阀口之间。
193.为了简化结构,可选择第四管路34、第五管路35、第十一管路311均通过和第三管路33和回油管路312连通,且在第三管路33上,第六切换阀e2的第二阀口、第四管路34、第五管路35、第十一管路311、回油管路312依次分布。
194.可选地,上述无人驾驶车斗控制阀组中,第一切换阀e6、第二切换阀ae51、第二切换阀b e52、第三切换阀e3,第四切换阀e4,第五切换阀e1,以及第六切换阀e2均为电磁阀,各个电磁阀根据无人驾驶车斗控制阀组的控制逻辑表所示的状态来实现车斗的各个状态。需要说明的是,图7所示的状态是指车斗处于保持状态,即每个电磁阀均不通电。
195.无人驾驶车斗控制阀组的控制逻辑表
[0196][0197]
上表中,e1表示第五切换阀,e2表示第六切换阀,e3表示第三切换阀,e4表示第四切换阀,e51表示第二切换阀a、e52表示第二切换阀b,e6表示第一切换阀。上表中,司机模式即为人工驾驶模式,动力起升、保持、浮动和动力下降均是在无人驾驶模式中。
[0198]
在实际应用过程中,也可选择上述车斗阀组为其他结构,并不局限于上述实施例。
[0199]
进一步地,上述电动轮式矿用自卸车的无人驾驶系统还包括:主机,与主机通信连接的电子控制单元300;其中,电子控制单元300根据主机的指令控制无人驾驶车斗控制阀组。可以理解的是,电子控制单元300和无人驾驶车斗控制阀组中各个阀连接以实现对无人驾驶车斗控制阀组中各个阀的控制。
[0200]
上述电动轮式矿用自卸车停在卸载位置时,应施加车轮制动锁定,即装载制动,然后动力起升车斗。为了实现无人驾驶制动锁定,上述电动轮式矿用自卸车的无人驾驶系统还包括无人驾驶车轮制动锁定模块。如图8所示,无人驾驶车轮制动锁定模块包括:制动锁定电磁阀41、制动锁定开关42、第一手自动切换器49、第一装载制动继电器47、第二手自动切换器410、第二装载制动继电器48、第一导线43、第二导线44、第三导线45和第四导线46。其中,第一手自动切换器49、第一装载制动继电器47、第二手自动切换器410、第二装载制动继电器48、第三导线45和第四导线46为新增部件,其他为原车部件。
[0201]
上述第一导线43的一端和制动锁定电磁阀41电连接,第一导线43的另一端用于和电控箱100电连接;第二导线44的一端用于和辅助箱控制模块200通信连接,第二导线44的另一端用于和电控箱100通信连接;制动锁定开关42通过其第一输入端和第一输出端串接在第一导线43上,制动锁定开关42通过其第二输入端和第二输出端串接在第二导线44上。
[0202]
可以理解的是,辅助箱控制模块200用于采集制动锁定信号。
[0203]
上述第三导线45的一端和制动锁定电磁阀41电连接,第三导线45的另一端用于和电控箱100电连接;第四导线46的一端用于和辅助箱控制模块200通信连接,第四导线46的另一端用于和电控箱100通信连接;第一装载制动继电器47串接在第三导线45上,第二装载制动继电器48串接在第四导线46上。可以理解的是,第一装载制动继电器47控制第三导线45的通断,第二装载制动继电器48控制第四导线46的通断。若第一装载制动继电器47处于断开状态,则第三导线45断开;若第一装载制动继电器47处于闭合状态,则第三导线45导通;若第二装载制动继电器48处于断开状态,则第四导线46断开;若第二装载制动继电器48处于闭合状态,则第四导线46导通。
[0204]
上述第一手自动切换器49切换第一导线43和第三导线45用于串接在电控箱100和制动锁定电磁阀41之间,第二手自动切换器410切换第二导线44和第四导线46用于串接在辅助箱控制模块200和电控箱100之间。
[0205]
若电动轮式矿用自卸车采用人工制动锁定,则第一手自动切换器49切换至第一导线43串接在电控箱100和制动锁定电磁阀41之间的状态,第二手自动切换器410切换至第二导线44串接在辅助箱控制模块200和电控箱100之间的状态;若电动轮式矿用自卸车采用无人制动锁定,则第一手自动切换器49切换至第三导线45串接在电控箱100和制动锁定电磁阀41之间的状态,第二手自动切换器410切换至第四导线46串接在辅助箱控制模块200和电控箱100之间的状态。
[0206]
可以理解的是,第一装载制动继电器47和第二装载制动继电器48所处状态相同。
[0207]
具体地,在人工制动锁定模式下,电控箱100通过第一导线43、制动锁定开关42向制动锁定电磁阀41供电,电控箱100通过第二导线44、制动锁定开关42向辅助箱控制模块200输送信号。在无人制动锁定模式下,电控箱100通过第三导线45、第一装载制动继电器47向制动锁定电磁阀41供电,电控箱100通过第四导向46、第二装载制动继电器48向辅助箱控制模块200输送信号。
[0208]
为了便于控制,若电动轮式矿用自卸车采用人工制动锁定,第一手自动切换器49、第一装载制动继电器47、第二手自动切换器410和第二装载制动继电器48均失电;若电动轮式矿用自卸车采用无人制动锁定,第一手自动切换器49、第一装载制动继电器47、第二手自动切换器410和第二装载制动继电器48均得电。
[0209]
可以理解的是,第一装载制动继电器47失电断开,第三导线45断开;第一装载制动继电器47得电闭合,第三导线45导通;第二装载制动继电器48失电断开,第四导线46断开;第二装载制动继电器48得电闭合,第四导线46导通。
[0210]
可选地,上述第一手自动切换器49和第二手自动切换器410均为手自动切换继电器;第一手自动切换器49的输入接口用于和电控箱100电连接,第一手自动切换器49的第一输出接口和第一导线43电连接,第一手自动切换器49的第二输出接口和第三导线45电连接;第三导线45和第一导线43电连接,且第三导线45和第一导线43的连接位置位于制动锁定电磁阀41和制动锁定开关42的第一输出端之间;第二手自动切换器410的输入接口用于和辅助箱控制器200电连接,第二手自动切换器410的第一输出接口和第二导线44电连接,第二手自动切换器410的第二输出接口和第四导线46电连接;第四导线46和第二导线44电连接,且第四导线46和第二导线44的连接位置位于电控箱100和制动锁定开关42的第二输出端之间。
[0211]
可以理解的是,若第一手自动切换器49处于第一状态,第一手自动切换器49的输入接口和第一输出接口导通;若第一手自动切换器49处于第二状态,第一手自动切换器49的输入接口和第二输出接口导通;若第二手自动切换器410处于第一状态,第二手自动切换器410的输入接口和第一输出接口导通;若第二手自动切换器410处于第二状态,第二手自动切换器410的输入接口和第二输出接口导通。
[0212]
进一步地,上述电动轮式矿用自卸车的无人驾驶系统还包括:主机,与主机通信连接的电子控制单元300;其中,第一手自动切换器49、第二手自动切换器410、第一装载制动继电器47和第二装载制动继电器48的通信接口均和电子控制单元300通信连接,电子控制单元300根据主机的指令控制第一手自动切换器49、第二手自动切换器410、第一装载制动继电器47和第二装载制动继电器48。
[0213]
需要说明的是,图8中并未画出:电子控制单元300,以及第一手自动切换器49、第二手自动切换器410、第一装载制动继电器47和第二装载制动继电器48的通信接口均和电子控制单元300通信连接。
[0214]
为了实现无人驾驶控制发动机的点火和熄火,上述电动轮式矿用自卸车的无人驾驶系统还包括无人驾驶发动机控制模块,如图9所示,无人驾驶发动机控制模块包括:电源400、钥匙开关53、电源继电器55、电控箱100、点火继电器58、熄火继电器59、点火线路57、手自动切换单元和电子控制单元300。其中,点火继电器58、熄火继电器59、手自动切换单元和电子控制单元300均为新增部件,电源400、钥匙开关53、电源继电器55、电控箱100、点火线路57均为原车部件。
[0215]
上述电源400通过第一供电导线52给钥匙开关53供电,熄火继电器59串接在第一供电导线52上并控制第一供电导线52的通断。
[0216]
上述电源400通过第二供电导线54给电控箱100供电,电源继电器55串接在第二供电导线54上并控制第二供电导线54的通断。
[0217]
上述电源继电器55的通信接口和钥匙开关53的供电档位53b通信连接,且钥匙开关53处于供电档位53b时电源继电器55导通第二供电导线54。
[0218]
上述电子控制单元300和钥匙开关53的供电档位53b通信连接以及获取钥匙开关53是否处于供电档位53b。
[0219]
上述手自动切换单元具有无人驾驶档位和人工驾驶档位,电子控制单元300和手自动切换单元电连接并获取手自动切换单元所处的档位。
[0220]
上述点火继电器58的通信接口和熄火继电器59的通信接口均和电子控制单元300通信连接。
[0221]
上述点火继电器58串接在自动点火线路510上,自动点火线路510的一端和点火线路57电连接,自动点火线路510的另一端和钥匙开关53的供电档位53b电连接,点火线路57和钥匙开关53的点火档位53c电连接;
[0222]
若手自动切换单元处于无人驾驶档,且钥匙开关53处于供电档位53b,电子控制单元300控制点火继电器58导通自动点火线路510。
[0223]
可以理解的是,钥匙开关53具有关闭档位53a、供电档位53b、点火档位53c。钥匙开关53处于供电档位53b,电源继电器55得电,电控箱100得电。
[0224]
进一步地,上述无人驾驶发动机控制模块还包括无人驾驶系统电源511,电源400
用于给无人驾驶系统电源511和电子控制单元300供电。
[0225]
进一步地,上述电动轮式矿用自卸车的无人驾驶系统还包括主机,电子控制单元300和主机通信连接,且电子控制单元300根据主机的指令控制点火继电器58和熄火继电器59的通断。
[0226]
具体地,主机给电子控制单元300发送点火指令,电子控制单元300控制点火继电器58得电,发动机起动。主机给电子控制单元300发送熄火指令,熄火继电器59得电,发动机熄火,预设时间后熄火继电器59失电。该预设时间可为5min,也可为其他时间,根据实际需要选择,本实施了对此不做限定。
[0227]
对于上述手自动切换单元的结构,根据实际需要选择。为了提高安全性,上述手自动切换单元包括至少一个模式选择开关56和/或至少一个模式选择按钮51,每个模式选择开关56具有无人驾驶档和人工驾驶档,每个模式选择按钮51具有无人驾驶档和人工驾驶档。
[0228]
具体地,若手自动切换单元仅包括至少一个模式选择开关56,则每个模式选择开关56均处于无人驾驶档时,手自动切换单元处于无人驾驶档;若手自动切换单元仅包括至少一个模式选择按钮51,则每个模式选择按钮51均处于无人驾驶档时,手自动切换单元处于无人驾驶档;若手自动切换单元包括至少一个模式选择开关56和至少一个模式选择按钮51,每个模式选择按钮51和每个模式选择开关56均处于无人驾驶档时,手自动切换单元处于无人驾驶档。
[0229]
为了实现无人驾驶切换档位,上述电动轮式矿用自卸车的无人驾驶系统还包括无人驾驶档位切换模块,如图10所示,无人驾驶档位切换模块包括:方向选择开关61、方向选择继电器62、电控箱100和电子控制单元300。其中,方向选择继电器62和电子控制单元300为增加的部件,方向选择开关61和电控箱100为原车部件。
[0230]
上述方向选择开关61具有驻车通信接口p、倒车通信接口r、空档通信接口n和前进通信接口d。
[0231]
上述电子控制单元300具有自动驻车通信接口p’、自动倒车通信接口r’、自动空档通信接口n’和自动前进通信接口d’。
[0232]
上述方向选择继电器62具有第一空档输入接口621、第二空档输入接口625、第一驻车输入接口622、第二驻车输入接口626、第一倒车输入接口623、第二倒车输入接口627、第一前进输入接口624、第二前进输入接口628、第一输出接口629、第二输出接口6210、第三输出接口6211、第四输出接口6212和切换输入接口6213。可以理解的是,方向选择继电器62具有接地接口6214,接地接口6214用于接地。
[0233]
上述空档通信接口n和第一空档输入接口621通信连接,驻车通信接口p和第一驻车输入接口622通信连接,倒车通信接口r和第一倒车输入接口623通信连接,前进通信接口d和第一前进输入接口624通信连接;上述自动空档通信接口n’和第二空档输入接口625通信连接,自动驻车通信接口p’和第二驻车输入接口626通信连接,自动倒车通信接口r’和第二倒车输入接口627通信连接,自动前进通信接口d’和第二前进输入接口628通信连接。
[0234]
若方向选择继电器62处于第一状态,第一输出接口629和第一空档输入接口621通信连接、第二输出接口6210和第一驻车输入接口622通信连接、第三输出接口6211和第一倒车输入接口623通信连接、第四输出接口6212和第一前进输入接口624通信连接;若方向选
择继电器62处于第二状态,第一输出接口629和第二空档输入接口625通信连接、第二输出接口6210和第二驻车输入接口626通信连接、第三输出接口6211和第二倒车输入接口627通信连接、第四输出接口6212和第二前进输入接口628通信连接。
[0235]
上述电子控制单元300和切换输入接口6213通信连接以控制方向选择继电器62的状态;电子控制单元300和方向选择开关61通信连接以采集方向选择开关61的状态,电子控制单元300和电控箱100信号连接以采集电控箱100所发出的档位信号。
[0236]
进一步地,上述电动轮式矿用自卸车的无人驾驶系统还包括主机,电子控制单元300和主机通信连接;其中,若方向选择开关61处于驻车档,电子控制单元300根据主机的指令向选择继电器62输入档位信号;若方向选择开关61未处于驻车档,电子控制单元300根据方向选择开关61所处的档位向方向选择继电器62输入档位信号。
[0237]
具体地,若方向选择开关61处于倒车档,电子控制单元300向上述方向选择继电器62输入倒车档信号,以实现倒车;若方向选择开关61处于空档,电子控制单元300向上述方向选择继电器62输入空档信号,以实现空档;若方向选择开关61处于前进档,电子控制单元300向上述方向选择继电器62输入前进档信号,以实现前进。
[0238]
需要说明的是,发动机起动前,电动轮式矿用自卸车必须置于驻车档,否则起动失败。档位切换时,车速为0,且车斗置于“浮动档”,否则切换失效。
[0239]
为了实现无人驾驶发动机速度控制,上述电动轮式矿用自卸车的无人驾驶系统还包括无人驾驶发动机速度控制模块,如图11所示,无人驾驶发动机速度控制模块包括:油门踏板71、刹车踏板72、切换继电器74、电子控制单元300、电控箱100。其中,油门踏板71、刹车踏板72和电控箱100为原车部件,切换继电器74和电子控制单元300为新增部件。
[0240]
上述切换继电器74具有通信接口、第一加速输入接口、第二加速输入接口、第一减速输入接口、第二减速输入接口、加速输出接口、减速输出接口。上述第一加入输入接口和油门踏板71通信连接,第一减速输入接口和刹车踏板72通信连接;第二加速输入接口、第二减速输入接口均和电子控制单元300通信连接;加速出口和减速出口均和电控箱100通信连接。
[0241]
若切换继电器74处于第一状态,第一加速输入接口和加速输出接口电连接、第一减速输入接口和减速输出接口电连接;若切换继电器74处于第二状态,第二加速输入接口和加速输出接口电连接、第二减速输入接口和减速输出接口电连接;电子控制单元300和切换继电器74的通信接口连接以控制切换继电器74的状态。
[0242]
进一步地,上述电动轮式矿用自卸车的无人驾驶系统还包括主机,电子控制单元300和主机通过网线通信连接,电子控制单元300根据主机的指令向电控箱100发送信号;电子控制单元300与油门踏板71通信连接以采集油门踏板71的状态并反馈给主机,电子控制单元300与刹车踏板72通信连接以采集刹车踏板72的状态并反馈给主机。可以理解的是,电子控制单元300发出的信号经切换继电器74输送给电控箱100。
[0243]
上述系统中,在人工驾驶发动机速度控制模式下,油门踏板71和刹车踏板72的信号进入电控箱100;在无人驾驶发动机速度控制模式下,电子控制单元300根据主机的指令向电控箱100发送信号。
[0244]
为了降低对原系统的影响,上述刹车踏板72的输出端通过减速线路75和第一减速输入接口通信连接,电子控制单元300通过分压线路76和减速线路75通信连接,分压线路76
串接有分压电阻77。
[0245]
对于分压电阻77的电阻值个,根据实际需要选择,例如分压电阻77的电阻为200kω,本实施例对此不做限定。
[0246]
上述油门踏板71的输出端通过加速线路73和第一加速输入接口通信连接。
[0247]
为了实现无人驾驶喇叭控制,上述电动轮式矿用自卸车的无人驾驶系统还包括无人驾驶喇叭控制模块,如图12所示,无人驾驶喇叭控制模块包括:喇叭按钮81、第一喇叭继电器82、第二喇叭继电器83和电子控制单元300。其中,喇叭按钮81和第一喇叭继电器82为原车现有部件,第二喇叭继电器83和电子控制单元300为新增部件。
[0248]
上述第一喇叭继电器82和第二喇叭继电器83并联设置,且第一喇叭继电器82所在的支路和第二喇叭继电器83所在的支路均与喇叭84串联;上述喇叭按钮81和第一喇叭继电器82的通信接口连接以控制第一喇叭继电器82的通断,电子控制单元300和第二喇叭继电器83的通信接口连接以控制第二喇叭继电器83的通断。
[0249]
进一步地,上述电动轮式矿用自卸车的无人驾驶系统还包括主机,电子控制单元300和主机通信连接,电子控制单元300根据主机的指令控制第二喇叭继电器83的通断。
[0250]
具体地,若处于人工驾驶模式,第二喇叭继电器83处于断电状态;若处于无人驾驶模式,主机向电子控制单元300发出指令,电子控制单元300根据指令控制第二喇叭继电器83得电,第二喇叭继电器83所在支路导通,喇叭84通电。
[0251]
为了实现无人驾驶车灯控制,上述电动轮式矿用自卸车的无人驾驶系统还包括无人驾驶车灯控制模块,如图13所示,无人驾驶车灯控制模块包括:近光灯继电器92、远光灯继电器97、近远光灯切换开关95、前灯开关91、转向灯信号开关912和电子控制单元300。其中,电子控制单元300为新增部件,近光灯继电器92、远光灯继电器97、近远光灯切换开关95、前灯开关91和转向灯信号开关912均为原车部件。
[0252]
上述前灯开关91和近光灯继电器92的通信接口连接以控制近光灯继电器92的通断,近光灯继电器92串接在近光灯线路上,若近光灯继电器92导通则近光灯93打开,若近光灯继电器92断开则近光灯93关闭。
[0253]
上述前灯开关91通过近远光灯切换开关95和远光灯继电器97的通信接口连接以控制远光灯继电器97的通断,远光灯继电器97串接在远光灯线路上,若远光灯继电器97导通则远光灯96打开,若远光灯继电器97断开则远光灯96关闭。
[0254]
可以理解的是,近远光灯切换开关95处于第一状态时,远光灯继电器97的通信接口和前灯开关91断开;近远光灯切换开关95处于第二状态时,远光灯继电器97的通信接口和前灯开关91导通,此时,前灯开关91可实现对远光灯继电器97的控制。
[0255]
上述转向灯信号开关912用于控制左转向灯98、左轮廓灯99、右转向灯910和右轮廓灯911的开闭。
[0256]
上述电子控制单元300和近光灯继电器92的通信接口连接以控制近光灯继电器92的通断,电子控制单元300和远光灯继电器97的通信接口连接以控制远光灯继电器97的通断,电子控制单元300和左转向灯98连接以控制左转向灯98的开闭,电子控制单元300和左轮廓灯99连接以控制左轮廓灯99的开闭,电子控制单元300和右转向灯910连接以控制右转向灯910的开闭,电子控制单元300和右轮廓灯911连接以控制右轮廓灯911的开闭。
[0257]
进一步地,上述电动轮式矿用自卸车的无人驾驶系统还包括主机,电子控制单元
300和主机通信连接,电子控制单元300根据主机的指令控制近光灯继电器92的通断和远光灯继电器97的通断、电子控制单元300根据主机的指令控制左转向灯98和左轮廓灯99的开闭、以及电子控制单元300根据主机的指令控制右转向灯910和右轮廓灯911的开闭。
[0258]
具体地,若电动轮式矿用自卸车处于人工驾驶模式,通过前灯开关91来控制近光灯继电器92的通断和远光灯继电器97的通断,通过转向灯信号开关912控制左转向灯98和左轮廓灯99的开闭,以及通过转向灯信号开关912控制右转向灯910和右轮廓灯911的开闭;若电动轮式矿用自卸车处于无人驾驶模式,通过电子控制单元300根据主机的指令控制近光灯继电器92的通断和远光灯继电器97的通断,通过电子控制单元300根据主机的指令发出信号以控制左转向灯98和左轮廓灯99的开闭,以及通过电子控制单元300根据主机的指令发出信号以控制右转向灯910和右轮廓灯911的开闭。
[0259]
需要说明的是,电压输入线94用于提供电压,电压输入线94具有两个电压输入分支,近光灯继电器92串接在一个电压输入分支上,近光灯93设置在该电压输入分支上;远光灯继电器97串接在一个电压输入分支上,远光灯96设置在该电压输入分支上。
[0260]
为了在无人驾驶模式下提供警示信息,上述电动轮式矿用自卸车的无人驾驶系统还包括无人驾驶警示灯控制模块,如图14所示,无人驾驶警示灯控制模块包括:三个警示灯组、警示灯继电器01和电子控制单元300。可以理解的是,无人驾驶警示灯控制模块为新增模块。
[0261]
每个上述警示灯组包括至少一个警示灯,一个警示灯组的警示灯为红灯02、一个警示灯组的警示灯为黄灯03,另一个警示灯组的警示灯为蓝灯04,警示灯继电器01和警示灯组一一对应。
[0262]
上述警示灯继电器01串接在与其对应的警示灯组和电子控制单元300之间以控制警示灯组中每个灯的开闭,且所电子控制单元300和警示灯继电器01的通信接口连接以控制警示灯继电器01的通断。
[0263]
若电动轮式矿用自卸车处于无人驾驶模式,蓝灯04闪;若电动轮式矿用自卸车处于人工驾驶模式,黄灯03闪;若电动轮式矿用自卸车处于故障模式,红灯02亮。
[0264]
为了提高可靠性,每个警示灯组中的警示灯至少为两个。具体地,可选择每个警示灯组中的警示灯为三个。
[0265]
进一步地,上述电动轮式矿用自卸车的无人驾驶系统还包括主机,主机和电子控制单元300通信连接,电子控制单元300根据主机发出的指令控制警示灯继电器01的通断以及向警示灯继电器01发出信号以控制相应的警示灯组。
[0266]
具体地,若电动轮式矿用自卸车处于无人驾驶模式,主机发出蓝灯闪指令,电子控制单元300控制和蓝灯对应的警示灯继电器01得电并导通,且电子控制单元300向和蓝灯对应的警示灯继电器01发出信号,以使蓝灯04闪;若电动轮式矿用自卸车处于人工驾驶模式,主机发出黄灯闪指令,电子控制单元300控制和黄灯对应的警示灯继电器01得电并导通,且电子控制单元300向和黄灯对应的警示灯继电器01发出信号,以使黄灯02闪;若电动轮式矿用自卸车处于故障模式,主机发出红灯亮指令,电子控制单元300控制和红灯对应的警示灯继电器01得电并导通,且电子控制单元300向和红灯对应的警示灯继电器01发出信号,以使红灯02亮。
[0267]
为了实现无人驾驶ac驱动停止控制以及无人驾驶超控控制,如图15所示,上述电
动轮式矿用自卸车的无人驾驶系统还包括:ac驱动停止开关001、超控开关003、电控箱100、ac驱动停止继电器002、超控继电器004和电子控制单元300。其中,ac驱动停止继电器002、超控继电器004和电子控制单元300为新增部件,ac驱动停止开关001、超控开关003和电控箱100为原车部件。
[0268]
上述ac驱动停止继电器002和ac驱动停止开关001并联设置,ac驱动停止继电器002所在支路和ac驱动停止开关001所在支路均与电控箱100通信连接,电子控制单元300和ac驱动停止继电器002的通信接口连接以控制ac驱动停止继电器002的通断。
[0269]
上述超控继电器004和超控开关003并联设置,超控继电器004所在支路和超控开关003所在支路均与电控箱100通信连接,电子控制单元300和超控继电器004的通信接口连接以控制超控继电器004的通断。
[0270]
需要说明的是,ac驱动停止开关001在发动机点火且电动轮式矿用自卸车无动作时使用,整车电驱动系统不工作,有利于节能。超控开关003在装载货物时使用,装载制动锁住后轮,整车无法前进,按下超控开关003,电动轮式矿用自卸车能够前进。
[0271]
进一步地,上述电动轮式矿用自卸车的无人驾驶系统还包括主机,电子控制单元300和主机通信连接,电子控制单元300根据主机的指令控制ac驱动停止继电器002的通断和超控继电器004的通断。
[0272]
具体地,若电动轮式矿用自卸车处于人工驾驶模式,通过ac驱动停止开关001向电控箱100发送信号,通过超控开关003向电控箱100发送信号;若电动轮式矿用自卸车处于无人驾驶模式,通过电子控制单元300根据主机的指令控制ac驱动停止继电器002导通以向电控箱100发送信号,通过电子控制单元300根据主机的指令控制超控继电器004导通以向电控箱100发送信号。
[0273]
为了更为具体地说明主机和电子控制单元300,如图16所示,主机与雷达、摄像头等传感器通过控制器局域网络或者网线直接连接进行通线连接,主机、转向控制器、电子控制单元300通过控制器局域网络进行通信连接,电子控制单元300通过控制器局域网络总线采集发动机的数据,电子控制单元300采集手动自动切换信号及驾驶室内显示的故障信息,电子控制单元300根据主机的指令控制车斗、液压制动、发动机起动、发动机熄火、发动机加减速、档位切换、警示灯、喇叭84、车灯、装载制动、超控开关003、ac驱动停止开关001。其中,采集驾驶室人工操作状态信息主要包括档位切换、起动、熄火、装载制动、油门踏板71、刹车踏板72。
[0274]
电子控制单元300所采集发动机的数据包括:发动机转速、机油压力、水温、水位、电池电压、进气温度、大气压力、工作小时数。
[0275]
电子控制单元300所采集的车辆状态包括:车速、液压油温度、燃油油位、车斗上限位开关的状态、车斗下限位开关的状态。另外,上述电子控制单元300还可采集电动轮式矿用自卸车的负载重量。
[0276]
电子控制单元300所采集车辆的故障报警数据包括:高液压油温度、低液压油油位、系统无推进/无减速、低转向压力、低蓄能器压力、低制动压力、发动机停机和蓄电池充电系统故障,电子控制单元300采集到上述任一故障报警,电动轮式矿用自卸车以100%电制动力停车。
[0277]
基于上述实施例提供的电动轮式矿用自卸车的无人驾驶系统,本实施例还提供了
一种电动轮式矿用自卸车,该电动轮式矿用自卸车包括上述实施例所述的电动轮式矿用自卸车的无人驾驶系统。
[0278]
由于上述电动轮式矿用自卸车的无人驾驶系统具有上述技术效果,上述电动轮式矿用自卸车包括上述电动轮式矿用自卸车的无人驾驶系统,则上述电动轮式矿用自卸车也具有相应的技术效果,本文不再赘述。
[0279]
可选地,上述电动轮式矿用自卸车为小松电动轮式矿用自卸卡车。具体地,小松电动轮式矿用自卸卡车为小松830e电动轮式矿用自卸卡车或小松930e电动轮式矿用自卸卡车。当然,也可选择上述电动轮式矿用自卸车为其他类型,本实施例对此不做限定。
[0280]
对所公开的实施例的上述说明,使本领域技术人员能够实现或使用本发明。对这些实施例的多种修改对本领域技术人员来说将是显而易见的,本文中所定义的一般原理可以在不脱离本发明的精神或范围的情况下,在其它实施例中实现。因此,本发明将不会被限制于本文所示的这些实施例,而是要符合与本文所公开的原理和新颖特点相一致的最宽的范围。