1.本实用新型涉及悬挂式轨道列车技术领域,具体而言,涉及一种障碍物探测装置及悬挂式轨道巡检机器人。
背景技术:
2.在轨道交通,例如悬挂式单轨列车系统中,轨道内形成相对封闭的空间以容置列车的驱动系统,在驱动系统的牵引下,空轨车厢悬挂于轨道梁的下方运行。在空轨运行中,当轨道内部存在障碍物或轨道梁下方的外部存在障碍物时,可能会对空轨运行造成影响。
3.相关技术中,在轨道梁建造后以及在空轨运行前利用检测机器人在轨道梁内走行,检测机器人搭载激光探测雷达以进行障碍物的识别感应。由于轨道梁内部和外部为不同的空间,检测机器人的激光探测雷达安装形式单一,无法适用于不同场景的障碍物检测。
技术实现要素:
4.本实用新型解决的问题是如何对激光探测雷达进行稳定的调节,以使激光探测雷达能够稳定活动,从而通过调节激光探测雷达的位置,以更好地适用于不同的障碍物检测场景。
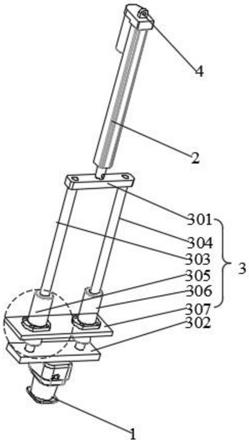
5.为解决上述问题,本实用新型提供一种障碍物探测装置,包括激光探测雷达、伸缩结构和支撑结构,所述支撑结构一端连接所述激光探测雷达,所述支撑结构远离于所述激光探测雷达的一端连接所述伸缩结构,所述伸缩结构适于驱动所述支撑结构以带动所述激光探测雷达活动,所述支撑结构设有第一障碍物探测装置安装部,所述支撑结构适于通过所述第一障碍物探测装置安装部与巡检机器人车架连接。
6.进一步地,所述支撑结构包括第一连接板、第二连接板、第一支撑杆和第二支撑杆,所述第一支撑杆和所述第二支撑杆并排设置于所述第一连接板和所述第二连接板之间,且所述第一支撑杆两端分别与所述第一连接板和所述第二连接板连接,所述第二支撑杆两端分别与所述第一连接板和所述第二连接板连接;所述激光探测雷达与所述第一连接板连接,所述伸缩结构与所述第二连接板连接。
7.进一步地,所述伸缩结构与所述第二连接板的连接处位于所述第一支撑杆与所述第二连接板的连接处和所述第二支撑杆与所述第二连接板的连接处之间。
8.进一步地,所述支撑结构还包括第一限位套筒和第二限位套筒,所述第一限位套筒和所述第二限位套筒均与所述第一障碍物探测装置安装部连接,所述第一支撑杆穿设于所述第一限位套筒内并适于与所述第一限位套筒的内壁贴合滑动,所述第二支撑杆穿设于所述第二限位套筒内并适于与所述第二限位套筒的内壁贴合滑动。
9.进一步地,所述第一限位套筒包括筒状部和与所述筒状部外周连接的固定部,所述第一支撑杆穿设于所述筒状部内并与所述筒状部的内壁滑动贴合,所述筒状部适于通过所述固定部与所述第一障碍物探测装置安装部连接。
10.进一步地,所述固定部处绕所述筒状部外周设有多个固定连接结构,所述固定部
适于通过所述固定连接结构与所述第一障碍物探测装置安装部连接。
11.进一步地,还包括第二障碍物探测装置安装部,所述第二障碍物探测装置安装部与所述伸缩结构远离于所述支撑结构的一端连接。
12.进一步地,所述伸缩结构包括电动推缸和与所述电动推缸连接的驱动机构,所述电动推缸与所述支撑结构连接。
13.本实用新型的有益效果:激光探测雷达通过无线电信号的发射和信号反射后的接收,能够对障碍物进行定位探测,伸缩结构可进行伸缩活动,从而在伸缩时驱动支撑结构运动,以此支撑结构一端的激光探测雷达被带动,从而使激光探测雷达进行稳定的同步活动。由此在进行障碍物检测时,通过控制伸缩结构运行,以将激光探测雷达调节到不同的位置或空间,以适用于不同的应用场景。在应用于悬挂式轨道巡检机器人上以进行轨道梁的障碍物检测时,可伸缩活动于轨道梁外部或内部,以进行轨道梁外部和内部的障碍物检测,以此提高作业效率同时,并且可将激光探测雷达调节至内部空间或外部空间的不同空间高度,以使障碍物探测更加准确,支撑结构设有第一障碍物探测装置安装部,以能够通过第一障碍物探测装置安装部将障碍物探测装置整体进行固定安装,以此使得支撑结构的固定更加稳定,如可安装于悬挂式轨道巡检机器人的巡检机器人车架处,以保证激光探测雷达更加稳定的活动,从而进行更加准确的探测。
14.另外,本实用新型还提供一种悬挂式轨道巡检机器人,包括上述所述的障碍物探测装置。
15.进一步地,还包括巡检机器人车架,所述巡检机器人车架与所述障碍物探测装置的第一障碍物探测装置安装部连接和/或与所述障碍物探测装置的第二障碍物探测装置安装部连接。
16.本实用新型的悬挂式轨道巡检机器人与上述障碍物探测装置相对于现有技术所具有的优势相同,在此不再赘述。
附图说明
17.图1为本实用新型实施例的障碍物探测装置的结构示意图;
18.图2为图1中圈示处的放大示意图;
19.图3为本实用新型实施例的悬挂式轨道巡检机器人的结构示意图。
20.附图标记说明:
[0021]1‑
激光探测雷达;2
‑
伸缩结构;3
‑
支撑结构;301
‑
第一连接板;302
‑
第二连接板;303
‑
第一支撑杆;304
‑
第二支撑杆;305
‑
第一限位套筒;315
‑
筒状部;325
‑
固定部;335
‑
固定连接结构;306
‑
第二限位套筒;307
‑
第一障碍物探测装置安装部;4
‑
第二障碍物探测装置安装部;5
‑
巡检机器人车架。
具体实施方式
[0022]
为使本实用新型的上述目的、特征和优点能够更为明显易懂,下面结合附图对本实用新型的具体实施例做详细的说明。
[0023]
要说明的是,本实用新型的说明书和权利要求书及上述附图中的术语“第一”、“第二”等是用于区别类似的对象,而不必用于描述特定的顺序或先后次序。应该理解这样使用
的数据在适当情况下可以互换,以便这里描述的本实用新型的实施例能够以除了在这里图示或描述的那些以外的顺序实施。
[0024]
参照图1和2所示,本实用新型提出了一种障碍物探测装置,包括激光探测雷达1、伸缩结构2和支撑结构3,所述支撑结构3一端连接所述激光探测雷达1,所述支撑结构3远离于所述激光探测雷达1的一端连接所述伸缩结构2,所述伸缩结构2适于驱动所述支撑结构3以带动所述激光探测雷达1活动,所述支撑结构3设有第一障碍物探测装置安装部307,所述支撑结构3适于通过所述第一障碍物探测装置安装部307与巡检机器人车架5连接。
[0025]
相关技术中,在轨道梁建造后以及在空轨运行前利用检测机器人在轨道梁内走行,检测机器人搭载激光探测雷达以进行障碍物的识别感应。由于轨道梁内部和外部为不同的空间,检测机器人的激光探测雷达安装形式单一,无法适用于不同场景的障碍物检测。
[0026]
本实施例中,障碍物探测装置包括激光探测雷达1,激光探测雷达1通过无线电信号的发射和信号反射后的接收,能够对障碍物进行定位探测,其中还包括伸缩结构2和支撑结构3,支撑结构3一端连接激光探测雷达1,以用于激光探测雷达1的固定安装,通过支撑结构3使激光探测雷达1的固定更加稳定,支撑结构3远离于激光探测雷达1的一端连接伸缩结构2,伸缩结构2可进行伸缩活动,从而在伸缩时驱动支撑结构3运动,以此支撑结构3另一端的激光探测雷达1被带动,从而使激光探测雷达1进行稳定的同步活动。由此在进行障碍物检测时,通过控制伸缩结构2运行,以将激光探测雷达1调节到不同的位置或空间,以适用于不同的应用场景。在应用于悬挂式轨道巡检机器人上以进行轨道梁的障碍物检测时,悬挂式轨道巡检机器人在一段轨道梁内运行时,可先将激光探测雷达1伸缩活动于轨道梁内,在巡检机器人前进的阶段进行轨道梁内部的障碍物检测,在巡检机器人返回的阶段将激光探测雷达1伸缩活动于轨道梁外部,以进行轨道梁外部的障碍物检测,以此提高作业效率同时,可将激光探测雷达1调节至内部空间或外部空间的不同空间高度,以使障碍物探测更加准确。
[0027]
其中,支撑结构3设有第一障碍物探测装置安装部307,以能够通过第一障碍物探测装置安装部307将障碍物探测装置整体进行固定安装,如安装于悬挂式轨道巡检机器人的巡检机器人车架5上,具体地,第一障碍物探测装置安装部307可为板状结构,其上可设置螺栓孔和/或卡接结构,以配合螺栓和/或卡接配合结构进行固定安装。
[0028]
在本实用新型的一个可选的实施例中,所述支撑结构3包括第一连接板301、第二连接板302、第一支撑杆303和第二支撑杆304,所述第一支撑杆303和所述第二支撑杆304并排设置于所述第一连接板301和所述第二连接板302之间,且所述第一支撑杆303两端分别与所述第一连接板301和所述第二连接板302连接,所述第二支撑杆304两端分别与所述第一连接板301和所述第二连接板302连接;所述伸缩结构2与所述第一连接板301连接,所述激光探测雷达1与所述第二连接板302连接。
[0029]
参照图1,本实施例中,以更加稳定地对激光探测雷达1进行带动。其中,支撑结构3包括第一连接板301、第二连接板302、第一支撑杆303和第二支撑杆304,第二连接板302与激光探测雷达1连接,以将激光探测雷达1安装固定,伸缩结构2带动第一连接板301以对支撑结构3整体进行带动,第一支撑杆303和第二支撑杆304并排设置,且第一支撑杆303和第二支撑杆304的两端均分别连接第一连接板301和第二连接板302,以对第一连接板301和第二连接板302进行更加稳定的支撑,从而,障碍物探测装置的支撑结构3形成框架形结构,将
激光探测雷达1固定的更加稳固,并且在伸缩结构2的驱动下,能够更加稳定的运行。
[0030]
本实用新型的一个可选的实施例中,所述伸缩结构2与所述第一连接板301的连接处位于所述第一支撑杆303与所述第一连接板301的连接处和所述第二支撑杆304与所述第一连接板301的连接处之间,以此伸缩结构2连接于第一连接板301的中部区域,便于对第一连接板301进行更加稳定的驱动,以使得激光探测雷达1的活动更加稳定。
[0031]
本实用新型的一个可选的实施例中,所述支撑结构3还包括第一限位套筒305和第二限位套筒306,所述第一限位套筒305和所述第二限位套筒306均与所述第一障碍物探测装置安装部307连接,所述第一支撑杆303穿设于所述第一限位套筒305内并适于与所述第一限位套筒305的内壁贴合滑动,所述第二支撑杆304穿设于所述第二限位套筒306内并适于与所述第二限位套筒306的内壁贴合滑动。
[0032]
参照图1
‑
3所示,本实施例中,其中,第一限位套筒305、第二限位套筒306与第一障碍物探测装置安装部307连接,以此使障碍物探测装置固定时,保持第一限位套筒305和第二限位套筒306固定,其中第一支撑杆303穿设于所述第一限位套筒305内并适于与所述第一限位套筒305的内壁贴合滑动,所述第二支撑杆304穿设于所述第二限位套筒306内并适于与所述第二限位套筒306的内壁贴合滑动,在第一支撑杆303活动时,通过第一限位套筒305对第一支撑杆303的活动进行限位,在第二支撑杆304活动时,通过第二限位套筒306对第二支撑杆304的活动进行限位,以此使得支撑结构3的活动更加稳定。
[0033]
在本实用新型的一个可选的实施例中,所述第一限位套筒305包括筒状部315和与所述筒状部315外周连接的固定部325,所述第一支撑杆303穿设于所述筒状部315内并与所述筒状部315的内壁滑动贴合,所述筒状部315适于通过所述固定部325与所述第一障碍物探测装置安装部307连接。
[0034]
本实施例中,第一限位套筒305包括筒状部315,从而第一支撑杆303穿设于筒状部315内,以通过筒状部315对第一支撑杆303的活动进行限位,并且在筒状部315的外周设置固定部325,通过固定部325与第一障碍物探测装置安装部307连接固定使筒状部315的固定更加稳固,从而对第一支撑杆303进行更加稳定的限位。
[0035]
在另一实施例中,第二限位套筒306的结构形式与第一限位套筒305的结构形式类似,在此不再进行赘述。
[0036]
本实用新型的一个可选的实施例中,所述固定部325处绕所述筒状部315外周设有多个固定连接结构335,所述固定部325适于通过所述固定连接结构335与所述第一障碍物探测装置安装部307连接。
[0037]
本实施例中,通过设置多个固定连接结构335,多个固定连接结构335绕筒状部315外周设置,以此在多个方位将筒状部315与第一障碍物探测装置安装部307进行连接固定,从而使得固定和限位更加稳固。其中,固定连接结构335可为螺栓连接结构和/或卡扣结构,以进行螺栓连接或卡接。
[0038]
在本实用新型的一个可选的实施例中,还包括第二障碍物探测装置安装部4,所述第二障碍物探测装置安装部4与所述伸缩结构2远离于所述支撑结构3的一端连接。本实施例中,障碍物探测装置还包括第二障碍物探测装置安装部4,其可为螺栓连接结构和/或卡扣结构,以进行螺栓连接或卡接,从而将伸缩结构2的一端进行固定,从而使伸缩结构2的运行更加稳定。
[0039]
本实施例中,所述伸缩结构2包括电动推缸和与所述电动推缸连接的驱动机构,所述电动推缸与所述支撑结构3连接,驱动机构可为驱动电机,通过驱动电机带动电动推缸以进行更加平稳地输出,从而对支撑结构3进行更加平稳地驱动。在另一实施例中,可采用剪叉伸缩结构,亦能进行伸缩驱动。
[0040]
参照图3,本实用新型另一实施例的一种悬挂式轨道巡检机器人,包括上述所述的障碍物探测装置。
[0041]
本实用新型实施例中的悬挂式轨道巡检机器人能够实现上述障碍物探测装置的各有益效果,在此不再赘述。
[0042]
本实用新型的一个可选的实施例中,还包括巡检机器人车架5,所述巡检机器人车架5与所述障碍物探测装置的第一障碍物探测装置安装部307连接和/或与所述障碍物探测装置的第二障碍物探测装置安装部4连接。
[0043]
参照图3,本实施例中,障碍物探测装置包括安装板形式的第一障碍物探测装置安装部307和具有螺栓连接结构的第二障碍物探测装置安装部4,以与巡检机器人车架5进行连接固定,从而使得障碍物探测装置的安装和运行更加稳定,使得探测更加准确。
[0044]
虽然本实用新型披露如上,但本实用新型并非限定于此。任何本领域技术人员,在不脱离本实用新型的精神和范围内,均可作各种更动与修改,因此本实用新型的保护范围应当以权利要求所限定的范围为准。