1.本实用新型涉及机器人领域,尤其涉及一种履带式室内用消防巡逻机器人。
背景技术:
2.线机器人:巡线机器人是以移动机器人作为载体,以可见光摄像机、红外热成像仪、其它检测仪器作为载荷系统,以机器视觉—电磁场—gps—gis的多场信息融合作为机器人自主移动与自主巡检的导航系统,以嵌入式计算机作为控制系统的软硬件开发平台;具有障碍物检测识别与定位、自主作业规划、自主越障、对输电线路及其线路走廊自主巡检、巡检图像和数据的机器人本体自动存储与远程无线传输、地面远程无线监控与遥控、电能在线实时补给、后台巡检作业管理与分析诊断等功能。
3.根据中国专利授权公告号cn210131279u提供的“一种履带式室内用消防巡逻机器人”,装置包括具有履带轮的机身,还包括传感器检测单元、消防救援单元、巡逻安防单元、路径行驶单元和主控单元,机身内设置有电池可向各个单元进行供电。本实用新型提供一种履带式室内用消防巡逻机器人,该机器人能按规划路线或通过远程操控进行24小时巡逻工作,但是存在机器人体积大,不便于室内巡逻,因此,有必要提供一种履带式室内用消防巡逻机器人解决上述技术问题。
技术实现要素:
4.本实用新型提供一种履带式室内用消防巡逻机器人,解决了传统巡逻机器人体积大,不便于室内巡逻的技术问题。
5.为解决上述技术问题,本实用新型提供的一种履带式室内用消防巡逻机器人,包括机器人底座,所述机器人底座顶端焊接安装有支撑车架,且支撑车架底面两侧转动安装有固定架,所述固定架底面安装有履带驱动轮,所述支撑车架底面前端焊接有碰撞防护板,所述机器人底座上端螺纹安装有蓄水罐,且蓄水罐前端通过直连管连接有消防喷头,所述机器人底座上端焊接有支撑立柱,且支撑立柱另一端固定安装有综合控制器,所述机器人底座顶端通过固定螺钉螺纹安装有斜撑杆,且斜撑杆另一侧焊接有支撑杆,所述支撑杆顶端接触安装有消防喷头,所述支撑杆前端安装有巡逻监视器,所述支撑车架底面两侧焊接有履带安装杆,且履带安装杆另一侧底面固定安装有固定架,具有体积小,能够在狭窄的室内通道中穿梭监视并进行前期灭火等优点。
6.优选的,所述机器人底座上端开设有夜视仪,便于机器人的夜间巡逻。
7.优选的,所述蓄水罐底面侧边焊接有罐体安装板,所述履带驱动轮外侧转动安装有移动履带,能够进行消防水存储。
8.优选的,所述支撑车架上端焊接有手提杆,所述巡逻监视器包括防浓烟罩,且防浓烟罩前端安装有摄像头,能够进行图像采集。
9.优选的,所述消防喷头底端安装有增压蓄能器,且增压蓄能器另一侧安装有管接头,所述管接头一侧连通于蓄水罐,能够喷射灭火。
10.优选的,所述斜撑杆与支撑杆之间焊接有焊接块,能够支撑消防喷头。
11.优选的,所述综合控制器包括防护外壳,所述防护外壳前端安装有显示器,且显示器两侧开设有控制面板,所述综合控制器顶端安装有gps信号放大器,便于工作人员控制机器人。
12.与相关技术相比较,本实用新型提供的一种履带式室内用消防巡逻机器人具有如下有益效果:
13.1.本实用新型提供一种履带式室内用消防巡逻机器人,通过安装支撑车架和机器人底座等部件,本装置的各个零件通过支撑车架和机器人底座来安装固定,在机器人底座底面安装有固定架和移动履带来驱动巡逻机器人进行运动,在机器人运动过程中,巡逻监视器能够对周围的环境进行监视,其中巡逻监视器内安装有摄像头,能够对巡逻画面进行采集,当巡逻画面完成采集后,图像传输到综合控制器内的显示器中进行画面显示,同时在综合控制器顶端安装有gps信号放大器,能够接收并反馈回机器人的位置信息,反馈的位置信息传输到底面控制端,解决了能够监控机器人的位置信息,并进行夜间巡逻的问题。
14.2.本实用新型提供一种履带式室内用消防巡逻机器人,通过安装增压蓄能器和蓄水罐等部件,在巡逻机器人的机器人底座内安装有浓烟检测器,当机器人遇见火情时,能够向系统发出警报,此时消防喷头内的电控式增压蓄能器工作,将水从蓄水罐中压出进行喷射,消防水从喷头中喷出进行暂时的灭火,防止火情进一步扩大,同时为了防止火焰烧毁机器,本装置的外壳均涂抹有防火材料,成分主要有水玻璃、石膏、磷酸盐、水泥,解决了能够进行火情的临时灭或的问题。
附图说明
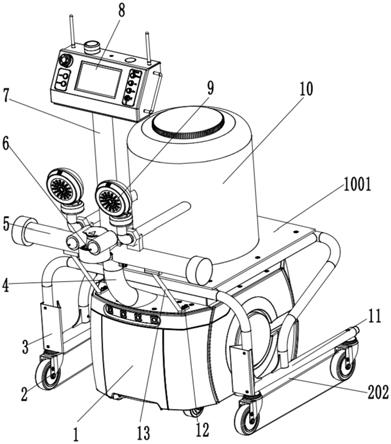
15.图1为本实用新型的结构示意图;
16.图2为本实用新型中消防喷头的结构局部示意图;
17.图3为本实用新型中手动控制器的结构局部示意图;
18.图4为本实用新型中支撑车架的结构局部示意图。
19.图中标号:1、机器人底座;101、夜视仪;2、履带驱动轮;201、固定架; 202、移动履带;3、碰撞防护板;4、支撑车架;401、手提杆;5、支撑杆;6、巡逻监视器;601、防浓烟罩;602、摄像头;7、支撑立柱;8、综合控制器;801、显示器;802、gps信号放大器;803、防护外壳;804、控制面板;9、消防喷头; 901、增压蓄能器;902、管接头;10、蓄水罐;1001、罐体安装板;11、履带安装杆;12、固定螺钉;13、斜撑杆;1301、焊接块。
具体实施方式
20.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述。
21.实施例一:
22.请参阅图1-4,本实用新型提供一种技术方案:一种履带式室内用消防巡逻机器人,包括机器人底座1,机器人底座1顶端焊接安装有支撑车架4,且支撑车架4底面两侧转动安装有固定架201,固定架201底面安装有履带驱动轮2,支撑车架4底面前端焊接有碰撞防护板3,机器人底座1上端螺纹安装有蓄水罐 10,且蓄水罐10前端通过直连管连接有消防喷
头9,机器人底座1上端焊接有支撑立柱7,且支撑立柱7另一端固定安装有综合控制器8,机器人底座1顶端通过固定螺钉12螺纹安装有斜撑杆13,且斜撑杆13另一侧焊接有支撑杆5,支撑杆5顶端接触安装有消防喷头9,支撑杆5前端安装有巡逻监视器6,支撑车架4底面两侧焊接有履带安装杆11,且履带安装杆11另一侧底面固定安装有固定架201,具有体积小,能够在狭窄的室内通道中穿梭监视并进行前期灭火等优点;机器人底座1上端开设有夜视仪101,便于机器人的夜间巡逻。
23.本实施方案中,本装置的各个零件通过支撑车架4和机器人底座1来安装固定,在机器人底座1底面安装有固定架201和移动履带202来驱动巡逻机器人进行运动,在机器人运动过程中,巡逻监视器6能够对周围的环境进行监视,其中巡逻监视器6内安装有摄像头602,能够对巡逻画面进行采集,当巡逻画面完成采集后,图像传输到综合控制器8内的显示器801中进行画面显示,同时在综合控制器8顶端安装有gps信号放大器802,能够接收并反馈回机器人的位置信息,反馈的位置信息传输到底面控制端,解决了能够监控机器人的位置信息,并进行夜间巡逻的问题。
24.实施例二:
25.请参阅图1-4,本实用新型提供一种技术方案:一种履带式室内用消防巡逻机器人,蓄水罐10底面侧边焊接有罐体安装板1001,履带驱动轮2外侧转动安装有移动履带202,能够进行消防水存储;支撑车架4上端焊接有手提杆401,巡逻监视器6包括防浓烟罩601,且防浓烟罩601前端安装有摄像头602,能够进行图像采集;消防喷头9底端安装有增压蓄能器901,且增压蓄能器901另一侧安装有管接头902,管接头902一侧连通于蓄水罐10,能够喷射灭火;斜撑杆 13与支撑杆5之间焊接有焊接块1301,能够支撑消防喷头9;综合控制器8包括防护外壳803,防护外壳803前端安装有显示器801,且显示器801两侧开设有控制面板804,综合控制器8顶端安装有gps信号放大器802,便于工作人员控制机器人。
26.本实施方案中,在巡逻机器人的机器人底座1内安装有浓烟检测器,当机器人遇见火情时,能够向系统发出警报,此时消防喷头9内的电控式增压蓄能器 901工作,将水从蓄水罐10中压出进行喷射,消防水从喷头中喷出进行暂时的灭火,防止火情进一步扩大,同时为了防止火焰烧毁机器,本装置的外壳均涂抹有防火材料,成分主要有水玻璃、石膏、磷酸盐、水泥,解决了能够进行火情的临时灭或的问题。
27.本实用新型提供的一种履带式室内用消防巡逻机器人的工作原理如下:
28.第一创新点实施步骤:
29.第一步:设备区别于传统的巡逻机器人,具有体积小,能够在狭窄的室内通道中穿梭监视并进行前期灭火等优点,本装置的各个零件通过支撑车架4和机器人底座1来安装固定;
30.第二步:在机器人底座1底面安装有固定架201和移动履带202来驱动巡逻机器人进行运动,在机器人运动过程中,巡逻监视器6能够对周围的环境进行监视,其中巡逻监视器6内安装有摄像头602,能够对巡逻画面进行采集;
31.第三步:当巡逻画面完成采集后,图像传输到综合控制器8内的显示器801 中进行画面显示,同时在综合控制器8顶端安装有gps信号放大器802,能够接收并反馈回机器人的位置信息,反馈的位置信息传输到底面控制端。
32.第二创新点实施步骤:
33.第一步:在巡逻机器人的机器人底座1内安装有浓烟检测器,当机器人遇见火情时,能够向系统发出警报,此时消防喷头9内的电控式增压蓄能器901工作,将水从蓄水罐10中压出进行喷射;
34.第二步:消防水从喷头中喷出进行暂时的灭火,防止火情进一步扩大,同时为了防止火焰烧毁机器,本装置的外壳均涂抹有防火材料,成分主要有水玻璃、石膏、磷酸盐、水泥;
35.第三步:本方案中,夜视仪101型号为shr-phlvr1000,综合控制器8采用 ypc-5516工业计算机,gps信号放大器802采用starry-t3000型号,摄像头602 采用c950型号。
36.尽管已经示出和描述了本实用新型的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本实用新型的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本实用新型的范围由所附权利要求及其等同物限定。