1.本实用新型涉及清洁机器人领域,具体涉及一种快速维修的清洁机器人。
背景技术:
2.近年来,随着社会经济的发展以及家庭生活水平的提高,家居等各种场所清洁逐步进入智能化、机器化的时代,应运而生的清洁机器人能够将人们从家居等各种场所清洁工作中解放出来,有效减轻人们在家居等各种场所清洁方面的工作负担,缓解人们在进行家居等各种场所清洁过程中的劳累程度。
3.清洁机器人的内部具有电气组件,这些电气组件是集成在机壳内,而清洁机器人在使用的过程中会出现各种各样的故障,需要对电气组件进行检查或维修处理,然而,由于目前的清洁机器人结构设计不合理,用户很难将机壳快速打开而对电气组件进行检查或维修处理。
4.专利申请号为cn201921202806.3的中国实用新型专利公开了一种便于快速打开维修的清洁机器人,该清洁机器人的电气组件是设于水箱的底部,然后将水箱可翻转设置,该装置虽然便于快速维修,但是该结构的水箱需要完全翻转才能对设于水箱底部的电气组件进行维修,如该结构是用于较大型的清洁机器,即水箱较重的清洁机器人,水箱与电气组件的完全分离则较困难。
技术实现要素:
5.为了克服上述现有技术的缺陷,本实用新型所要解决的技术问题是提供一种快速维修的清洁机器人,能够比较容易的将较大型的清洁机器上的容纳箱与电气组件分离,从而便于快速维修清洁机器人上电控箱。
6.为了解决上述技术问题,本实用新型采用的第一技术方案为:
7.一种快速维修的清洁机器人,包括清洁机器人本体以及分别设于清洁机器人本体上的容纳箱和电控箱,所述容纳箱和电控箱并排设置且相互贴合,所述电控箱与容纳箱相对的侧面上设有维修口,所述容纳箱与清洁机器人本体可移动连接且所述容纳箱沿远离或靠近电控箱方向移动,当所述容纳箱沿远离电控箱方向水平移动时,所述容纳箱与维修口之间的间距大于维修时所需的空间。
8.本实用新型采用的第二技术方案为:
9.一种快速维修的清洁机器人,包括清洁机器人本体以及分别设于清洁机器人本体上的容纳箱和电控箱,所述容纳箱和电控箱并排设置,所述电控箱与容纳箱相对的侧面上设有维修口,所述容纳箱远离所述维修口的一端与所述清洁机器人本体翻转连接,所述容纳箱与电控箱之间留有供所述容纳箱翻转的间距,当所述容纳箱翻转时,所述容纳箱与维修口之间分离出的空间大于维修时所需的空间。
10.进一步的,所述清洁机器人本体上设有滑轨,所述容纳箱通过滑块可滑动的设于所述滑轨上。
11.进一步的,所述清洁机器人本体上设有将翻转后的容纳箱固定的拉绳。
12.进一步的,还包括给清洁机器人本体供电的电池,所述容纳箱靠近维修口的一侧设有缺口,所述缺口的面积大于所述电池的面积,所述电池设于所述清洁机器人本体上位于所述容纳箱的缺口处。
13.进一步的,所述清洁机器人本体上设有将所述容纳箱固定的锁紧组件。
14.进一步的,所述容纳箱为水箱。
15.本实用新型的有益效果在于:
16.采用该技术方案,由于容纳箱和电控箱是并排设置的,且电控箱设有维修口的一侧是与容纳箱靠近,当需要对电控箱内部进行维修时,只需将容纳箱与电控箱的维修口分离较短的距离,即可以对电控箱内部的电器组件进行维修。
附图说明
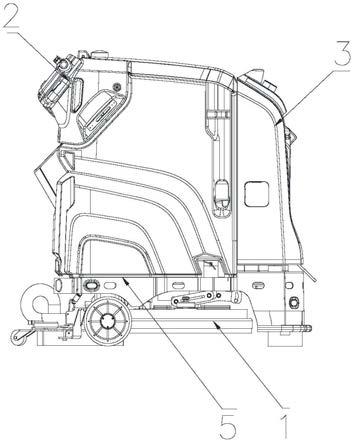
17.图1为本实用新型容纳箱可移动连接的结构示意图;
18.图2为本实用新型容纳箱与电控箱分离后的结构示意图;
19.图3为本实用新型容纳箱可翻转连接的结构示意图;
20.标号说明:
21.1、清洁机器人本体;2、容纳箱;3、电控箱;4、维修口;5、滑轨;6、缺口;7、电池。
具体实施方式
22.为详细说明本实用新型的技术内容、所实现目的及效果,以下结合实施方式并配合附图予以说明。
23.实施例1
24.参照图1和图2,一种快速维修的清洁机器人,包括清洁机器人本体1以及分别设于清洁机器人本体1上的容纳箱2和电控箱3,容纳箱2为水箱,当然容纳箱2也可以是用于存放固体的箱体结构或是可以同时存储液体和固体的箱体结构,容纳箱2和电控箱3并排设置且相互贴合,电控箱3与容纳箱2相对的侧面上设有将电控箱3内部的电器组件露出的维修口4,容纳箱2与清洁机器人本体1可移动连接且容纳箱2沿远离或靠近电控箱3方向移动,当所述容纳箱2 沿远离电控箱3方向水平移动时,所述容纳箱2与电控箱3之间的间距大于维修时所需的空间,即所述容纳箱2与维修口4之间的间距大于维修时所需的空间。本实施方式的容纳箱2可移动的结构为:清洁机器人本体1上设有滑轨5,容纳箱2通过滑块可滑动的设于所述滑轨5上,滑轨5可以水平或竖直的设置于清洁机器人本体1上,本实施方式的滑轨5为水平设置,需要解释的是,由于清洁机器人本体1用于设置滑轨5的部位不可能是水平结构,故滑轨5的水平设置实质上是具有第一斜度的。
25.使用原理
26.当电控箱3需要维修时,容纳箱2通过滑轨5移动,使容纳箱2与维修口4 分离,由于容纳箱2和电控箱3是并排设置的,所以只需将容纳箱2移动较短的距离即可以为电控箱3留出较大的维修空间。
27.参照图1和图2,本技术方案还包括给清洁机器人本体1供电的电池7,容纳箱2靠近维修口4的一侧设有缺口6,缺口6的面积大于所述电池7的面积,电池7设于所述清洁机器人
本体1上位于所述容纳箱2的缺口6处。
28.采用该技术方案,当容纳箱2与电控箱3分离时,容纳箱2也会与电池7 分离,也便于对电池7的维修。
29.参照图1和图2,本技术方案的清洁机器人本体1上设有将容纳箱2固定的锁紧组件(图中未视出),锁紧组件可以才用卡扣或锁的结构,在这不加赘述。
30.采用该技术方案,当电控箱3不需要维修时,可以用锁紧组件固定。
31.实施例2
32.参照图3,一种快速维修的清洁机器人,包括清洁机器人本体1以及分别设于清洁机器人本体1上的容纳箱2和电控箱3,容纳箱2为水箱,当然容纳箱2 也可以是用于存放固体的箱体结构或是可以同时存储液体和固体的箱体结构,所述容纳箱2和电控箱3并排设置,所述电控箱3与容纳箱2相对的侧面上设有维修口4,所述容纳箱2远离所述维修口4的一端与所述清洁机器人本体1翻转连接,所述容纳箱2与电控箱3之间留有供所述容纳箱2翻转的间距,当所述容纳箱2翻转时,所述容纳箱2与电控箱3之间分离出的空间大于维修时所需的空间,即所述容纳箱2与维修口4之间分离出的空间大于维修时所需的空间。
33.使用原理
34.当电控箱3需要维修时,容纳箱2通过翻转结构将容纳箱2翻转,使容纳箱2与维修口4分离,由于容纳箱2和电控箱3是并排设置的,所以只需将容纳箱2翻转较小的角度即可以为电控箱3留出较大的维修空间。
35.参照图3,本技术方案还包括给清洁机器人本体1供电的电池7,容纳箱2 靠近维修口4的一侧设有缺口6,缺口6的面积大于电池7的面积,电池7设于所述清洁机器人本体1上位于所述容纳箱2的缺口6处。
36.采用该技术方案,当容纳箱2与电控箱3翻转分离时,容纳箱2也会与电池7分离,也便于对电池7的维修。
37.参照图3,本技术方案的清洁机器人本体1上设有将翻转后的容纳箱2固定的拉绳(图中未视出)。
38.采用该技术方案,当容纳箱2翻转到一定角度后可以用拉绳固定,防止容纳箱2往维修口4方向掉落。
39.参照图3,本技术方案的清洁机器人本体1上设有将容纳箱2固定的锁紧组件(图中未视出),锁紧组件可以才用卡扣或锁的结构,在这不加赘述。
40.采用该技术方案,当电控箱3不需要维修时,可以用锁紧组件固定。
41.以上所述仅为本实用新型的实施例,并非因此限制本实用新型的专利范围,凡是利用本实用新型说明书及附图内容所作的等同变换,或直接或间接运用在相关的技术领域,均同理包括在本实用新型的专利保护范围内。