1.本技术涉及海滩清洗领域,具体而言,涉及一种绿色节能滩涂自动清洁机器人。
背景技术:
2.据统计,我国滩涂垃圾的平均个数约为1.03个/m2,占地总密度约为15.91g/m2,滩涂垃圾主要包括塑料、泡沫、橡胶、玻璃、织物与纸类等生活垃圾和旅游垃圾。垃圾污染会使滩涂的厚度变薄以至于很难保持平衡性,部分垃圾缠结鸟类等动物使其受到物理伤害甚至死亡,塑料垃圾潜在的毒性和吸收的污染物也对生物产生化学危害,难以降解的垃圾严重影响了滩涂生态。面对滩涂的面积和生态不断被垃圾所蚕食,严重影响人类未来生存和发展空间的现状,我们理当提出相应的解决措施。
3.面对滩涂泥泞的土质环境,目前我国滩涂垃圾清理方案总共分为三种:纯人力清理、人力与挖掘机等大型机器配合清理以及专用沙滩垃圾清理车清理。国外的滩涂垃圾清理技术总体较我国先进,主要采取滩涂清理车清理的方式,国内尚缺乏技术比较成熟的适用于滩涂垃圾清理的机械,大多仍只是停留于设计或理论阶段。我国现有的滩涂垃圾清理车主要来源于国外进口,但大量进口不仅价格昂贵,且结构复杂,操作保养困难,出现故障不易排查修理。因此,我国对于滩涂的清理仍采取传统纯人力清理或者人机结合清理的方式。
4.基于以上情况,本发明提供一种绿色节能滩涂自动清洁机器人用以解决滩涂严重的环境问题。
技术实现要素:
5.本技术的目的在于提供一种绿色节能滩涂自动清洁机器人,其能够快速高效的清理滩涂区域的垃圾,且能够有效的回收垃圾袋和网状垃圾。
6.本技术的实施例是这样实现的:
7.本技术实施例提供一种绿色节能滩涂自动清洁机器人,其包括底部具有开口的机器人壳体、用于驱动机器人壳体移动的至少两个防陷入履带装置及设于机器人壳体内的网状垃圾收集装置,网状垃圾收集装置包括水平布置且底壁向下伸出开口的收集桶、用于驱动收集桶旋转的收集电机、设于收集桶一侧的网状垃圾收集箱、设于收集桶内的凸轮、多个可伸缩地插设于收集桶上的顶刺及一一对应地套设于顶刺上的弹簧,多个顶刺沿收集桶的周向间隔布置,每个弹簧的两端分别抵压收集桶内壁和顶刺位于收集桶内的一端,凸轮用于推动收集桶上远离网状垃圾收集箱的顶刺伸出,网状垃圾收集箱朝向收集桶的一侧设有垃圾进口。
8.在一些可选的实施方案中,机器人壳体内还设有普通垃圾收集装置,普通垃圾收集装置包括两个链轮、套设于两个链轮上的传送链板、用于驱动链轮旋转的传送电机、普通垃圾收集箱及多个间隔设于传送链板表面的垃圾挖掘齿,传送链板的一端向下延伸并伸出开口,普通垃圾收集箱位于传送链板的另一端下方,传送链板随链轮旋转时带动垃圾挖掘
齿将垃圾输送至普通垃圾收集箱。
9.在一些可选的实施方案中,防陷入履带装置包括连接于机器人壳体的驱动轮、多个支重轮和至少一个导向轮及套设并啮合于驱动轮、支重轮和导向轮上的履带,机器人壳体内设有与驱动轮通过齿轮箱传动连接的驱动电机。
10.在一些可选的实施方案中,防陷入履带装置还包括至少一根张紧杆及与每根张紧杆对应的至少一个张紧轮,张紧杆的两端分别与机器人壳体和对应张紧轮铰接,张紧杆与机器人壳体通过用于将两者锁止或解锁的紧固螺栓铰接。
11.在一些可选的实施方案中,履带为多个履带板通过多个履带销连接组成的柔性链环。
12.在一些可选的实施方案中,机器人壳体连接有位于对应履带上方的三筋履带板。
13.在一些可选的实施方案中,网状垃圾收集箱和/或普通垃圾收集箱的底部设有压力传感器。
14.在一些可选的实施方案中,机器人壳体的顶面设有至少一块太阳能电池板。
15.在一些可选的实施方案中,机器人壳体的顶部设有摄像头。
16.本技术的有益效果是:本实施例提供的绿色节能滩涂自动清洁机器人包括底部具有开口的机器人壳体、用于驱动机器人壳体移动的至少两个防陷入履带装置及设于机器人壳体内的网状垃圾收集装置,网状垃圾收集装置包括水平布置且底壁向下伸出开口的收集桶、用于驱动收集桶旋转的收集电机、设于收集桶一侧的网状垃圾收集箱、设于收集桶内的凸轮、多个可伸缩地插设于收集桶上的顶刺及一一对应地套设于顶刺上的弹簧,多个顶刺沿收集桶的周向间隔布置,每个弹簧的两端分别抵压收集桶内壁和顶刺位于收集桶内的一端,凸轮用于推动收集桶上远离网状垃圾收集箱的顶刺伸出,网状垃圾收集箱朝向收集桶的一侧设有垃圾进口。本实施例提供的绿色节能滩涂自动清洁机器人能够快速高效的清理滩涂区域的垃圾,且能够有效的回收垃圾袋和网状垃圾。
附图说明
17.为了更清楚地说明本技术实施例的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,应当理解,以下附图仅示出了本技术的某些实施例,因此不应被看作是对范围的限定,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他相关的附图。
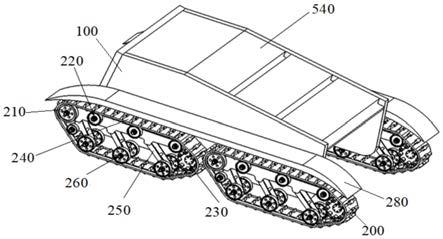
18.图1为本技术实施例提供的绿色节能滩涂自动清洁机器人的结构示意图;
19.图2为本技术实施例提供的绿色节能滩涂自动清洁机器人的剖视结构示意图;
20.图3为本技术实施例提供的绿色节能滩涂自动清洁机器人中张紧杆、张紧轮和紧固螺栓的连接结构示意图;
21.图4为本技术实施例提供的绿色节能滩涂自动清洁机器人中网状垃圾收集装置的剖视结构示意图。
22.图中:100、机器人壳体;110、开口;200、防陷入履带装置;210、驱动轮;220、支重轮;230、导向轮;240、履带;250、张紧杆;260、张紧轮;270、紧固螺栓;280、三筋履带板;300、普通垃圾收集装置;310、链轮;320、传送链板;330、传送电机;340、普通垃圾收集箱;350、垃圾挖掘齿;400、网状垃圾收集装置;410、收集桶;420、收集电机;430、网状垃圾收集箱;440、
凸轮;450、顶刺;460、弹簧;470、垃圾进口;500、控制器;510、摄像头;520、蓄电池;530、信号接收器;540、太阳能电池板;550、gps定位模块;560、六轴传感器;570、压力传感器。
具体实施方式
23.为使本技术实施例的目的、技术方案和优点更加清楚,下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本技术一部分实施例,而不是全部的实施例。通常在此处附图中描述和示出的本技术实施例的组件可以以各种不同的配置来布置和设计。
24.因此,以下对在附图中提供的本技术的实施例的详细描述并非旨在限制要求保护的本技术的范围,而是仅仅表示本技术的选定实施例。基于本技术中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本技术保护的范围。
25.应注意到:相似的标号和字母在下面的附图中表示类似项,因此,一旦某一项在一个附图中被定义,则在随后的附图中不需要对其进行进一步定义和解释。
26.在本技术的描述中,需要说明的是,术语“中心”、“上”、“下”、“左”、“右”、“竖直”、“水平”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,或者是该申请产品使用时惯常摆放的方位或位置关系,仅是为了便于描述本技术和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本技术的限制。此外,术语“第一”、“第二”、“第三”等仅用于区分描述,而不能理解为指示或暗示相对重要性。
27.此外,术语“水平”、“竖直”、“悬垂”等术语并不表示要求部件绝对水平或悬垂,而是可以稍微倾斜。如“水平”仅仅是指其方向相对“竖直”而言更加水平,并不是表示该结构一定要完全水平,而是可以稍微倾斜。
28.在本技术的描述中,还需要说明的是,除非另有明确的规定和限定,术语“设置”、“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本技术中的具体含义。
29.在本技术中,除非另有明确的规定和限定,第一特征在第二特征之“上”或之“下”可以包括第一和第二特征直接接触,也可以包括第一和第二特征不是直接接触而是通过它们之间的另外的特征接触。而且,第一特征在第二特征“之上”、“上方”和“上面”包括第一特征在第二特征正上方和斜上方,或仅仅表示第一特征水平高度高于第二特征。第一特征在第二特征“之下”、“下方”和“下面”包括第一特征在第二特征正下方和斜下方,或仅仅表示第一特征水平高度小于第二特征。
30.以下结合实施例对本技术的绿色节能滩涂自动清洁机器人的特征和性能作进一步的详细描述。
31.如图1、图2、图3和图4所示,本技术实施例提供一种绿色节能滩涂自动清洁机器人,其包括机器人壳体100,机器人壳体100的两侧分别设有两个用于驱动机器人壳体100移动的防陷入履带装置200,机器人壳体100的底部设有开口110,机器人壳体100内还设有控
制器500、蓄电池520、普通垃圾收集装置300及网状垃圾收集装置400,机器人壳体100的顶部设有摄像头510、信号接收器530及四块与蓄电池520电连接的太阳能电池板540,控制器500分别与摄像头510和信号接收器530电连接,机器人壳体100内还设有与控制器500电连接的gps定位模块550和六轴传感器560。
32.其中,每个防陷入履带装置200包括连接于机器人壳体100的驱动轮210、四个支重轮220和一个导向轮230及套设并啮合于驱动轮210、支重轮220和导向轮230上的履带240,机器人壳体100内设有与驱动轮210通过齿轮箱传动连接的驱动电机,防陷入履带装置200还包括三根张紧杆250及与每根张紧杆250对应的一对张紧轮260,张紧杆250的一端机器人壳体100铰接,另一端分别和对应的一对张紧轮260铰接,张紧杆250与机器人壳体100通过用于将两者锁止或解锁的紧固螺栓270铰接;每条履带240均为30个履带板通过60个履带销连接组成的柔性链环,机器人壳体100两侧分别连接有位于对应履带240上方的三筋履带板280。
33.普通垃圾收集装置300包括两个上下布置的链轮310、套设于两个链轮310上的传送链板320、传送电机330、顶部开口的普通垃圾收集箱340及24个间隔设于传送链板320表面的垃圾挖掘齿350,位于下方的链轮310的底部穿过并伸出至开口110下方,传送链板320的一端向下延伸并伸出开口110,普通垃圾收集箱340设于位于上方的链轮310下方,传送电机330的输出轴与位于上方的链轮310传动连接,传送链板320随链轮310旋转时带动垃圾挖掘齿350将垃圾挖起并输送至普通垃圾收集箱340内。
34.网状垃圾收集装置400包括轴线水平布置的收集桶、用于驱动收集桶410旋转的收集电机420、设于收集桶410一侧的网状垃圾收集箱430、设于收集桶410内的凸轮440、14个可伸缩地插设于收集桶410上的顶刺450及一一对应地套设于顶刺450上的弹簧460,收集桶410的底壁向下延伸并伸出开口110,14根顶刺450沿收集桶410的周向间隔布置,每根顶刺450的一端均滑动贯穿至收集桶410内,每个弹簧460的两端分别抵压收集桶410内壁和顶刺450位于收集桶410内的一端端部,凸轮440用于推动收集桶410上远离网状垃圾收集箱430一侧的顶刺450伸出,网状垃圾收集箱430朝向收集桶410的一侧设有垃圾进口470;网状垃圾收集箱430和普通垃圾收集箱340的底部分别设有与控制器500电连接的压力传感器570。
35.本实施例提供的绿色节能滩涂自动清洁机器人使用时,通过控制机器人壳体100两侧分别设有的两个防陷入履带装置200驱动机器人壳体100在滩涂环境下移动,每个防陷入履带装置200的驱动电机通过齿轮箱带动驱动轮210旋转进而带动履带240移动,通过连接于机器人壳体100的支重轮220和导向轮230稳定的支撑和引导履带240移动,从而驱动机器人壳体100移动,其通过履带240增大机器人壳体100的接地面积,并降低了对地面的压强,可有效的适应滩涂地区潮湿松软的土壤环境,从而防止下陷,每条履带240均为30个履带板通过60个履带销连接组成的柔性链环,柔性链环的可变形程度大,同时防陷入履带装置200使得机器人壳体100的底盘较高,可轻松越过一般障碍物并适应凹凸不平地地面。机器人壳体100两侧分别连接有位于对应履带240上方的三筋履带板280,当履带240转动时彼此分开可使碎屑可以掉落,达到清理淤泥的自清洁功能,并通过三筋履带板280减少淤泥的累积和降低履带的摩擦力,提高行走效率;防陷入履带装置200还包括三根张紧杆250及与每根张紧杆250对应的一对张紧轮260,张紧杆250的一端机器人壳体100铰接,另一端分别和对应的一对张紧轮260铰接,张紧杆250与机器人壳体100通过用于将两者锁止或解锁的
紧固螺栓270铰接,作业人员能够旋转紧固螺栓270将张紧杆250与机器人壳体100松开,随后相对于机器人壳体100转动张紧杆250调整张紧杆250铰接的张紧轮260的位置以张紧履带240,随后反向旋转紧固螺栓270将张紧杆250与机器人壳体100重新锁止固定。
36.当机器人壳体100移动时,通过设于机器人壳体100顶部的摄像头510对前方路况和垃圾进行识别,并将信息传输至控制器500,控制器500根据情况对垃圾分类并进行后续处理;机器人壳体100还能够通过sins/gps组合导航的方式进行自主导航与自主控制,通过在机器人壳体100内设设置mpu6050六轴传感器560和gps定位模块550,利用gps定位模块550输出的位置和速度与六轴传感器560进行组合,对惯性导航的长时间导航积累误差进行滤波修正,并且将信息输送至控制器500,控制器500分析并构建一套路径规划流程,用以解决垃圾巡检状态下的路径规划,提高设备的自动化和智能化程度,同时在机器人壳体100的顶部设有四块与蓄电池520电连接的太阳能电池板540,能够充分利用浅滩上无遮挡的光照环境作为副能源供给各个电机使用,让机器人的续航时间更久。
37.当需要对滩涂上的垃圾进行清理时,可以分别使用普通垃圾收集装置300和网状垃圾收集装置400对垃圾进行收集和清理,使用普通垃圾收集装置300清理垃圾时,通过传送电机330带动链轮310旋转从而带动套设于两个链轮310上的传送链板320回转移动,传送链板320回转移动时带动表面连接的垃圾挖掘齿350移动将地面的垃圾铲起,并经过回转的传送链板320将铲起的垃圾输送至普通垃圾收集箱340内进行存放,完成对地面上普通垃圾的收集和储存;当使用网状垃圾收集装置400清理垃圾时,通过收集电机420驱动收集桶410旋转,在收集桶410的一侧表面旋转至远离网状垃圾收集箱430时,收集桶410内设置的凸轮440外壁抵压对应表面设置的顶刺450,使对应顶刺450克服弹簧460的弹力伸出并将地面的网状垃圾或塑料袋戳起,当收集桶410继续旋转至靠近网状垃圾收集箱430时,凸轮440外壁停止抵压对应表面设置的顶刺450,弹簧460的弹力推动顶刺450反向移动收缩回收集桶410内,顶刺450停止戳起网状垃圾或塑料袋,使网状垃圾或塑料袋由于抛出作用进入网状垃圾收集箱430朝向收集桶410的一侧设有的垃圾进口470得到回收,实现网状或塑料垃圾的回收和收集,网状垃圾收集箱430和普通垃圾收集箱340的底部分别设有与控制器500电连接的压力传感器570,当网状垃圾收集箱430和普通垃圾收集箱340内收集的垃圾太大时,控制器500接收到压力传感器570传递的压力数据达到预设数值控制机器人壳体100移动至预设地点清空收集的垃圾。
38.以上所描述的实施例是本技术一部分实施例,而不是全部的实施例。本技术的实施例的详细描述并非旨在限制要求保护的本技术的范围,而是仅仅表示本技术的选定实施例。基于本技术中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本技术保护的范围。