1.本发明涉及机器人技术领域,特别指一种自移动机器人。
背景技术:
2.目前,随着扫地机器人、接待机器人等智能自移动机器人设备成为了应用越来越广泛的智能终端,而市场对智能自移动机器人的移动过程可靠性提出了更高的要求。一般而言,自移动机器人采用可拆卸的万向轮进行辅助方向控制,这种方式一定程度上提高了可维修性能,但是同时对长久工作状态下的万向轮,特别是需要经历越障工作的万向轮,提出了更高的要求。在经历多次越障工作后,万向轮很可能因为与自移动机器人之间的可拆卸连接件连接失效而造成万向轮的脱落,从而影响自移动机器人的正常工作。
3.因此,有必要提出一种自移动机器人,用以解决现有技术中万向轮容易脱落造成的问题。
技术实现要素:
4.发明目的:为了克服现有技术中存在的不足,本发明提供一种万向轮容易脱落造成的自移动机器人。
5.技术方案:一种自移动机器人,包括:
6.主体,设置于主体底面的行进轮和万向轮组件,所述万向轮组件包括:
7.万向轮;
8.用以装载所述万向轮的万向轮支架,所述万向轮支架顶端设有用以带动所述万向轮支架转动的万向轴,所述万向轴上端设有沿所述万向轴周向设置的凹槽;
9.所述主体上设有用以装载所述万向轴的通孔,所述通孔向主体内部延伸形成管体,所述管体顶端设有沿所述通孔径向设置的突出部,所述突出部伸入所述凹槽内。
10.进一步地,所述突出部与所述管体为一体制造而成的。
11.进一步地,所述突出部为垫片,所述垫片设有沿径向设置的安装槽,所述垫片沿所述安装槽方向插入所述凹槽。
12.进一步地,所述万向轴上还套设有轴承,所述万向轴通过所述轴承可转动地设于所述管体内。
13.进一步地,所述万向轴的顶端设有用以防止所述突出部脱出的帽部。
14.进一步地,所述凹槽下端面被设置为用以引导所述突出部进入所述凹槽的斜面。
15.有益效果:本发明自移动机器人,通过在万向轴上设置凹槽,并在主体上用以装载万向轮的通孔上设置管体,通过管体上设置的突出部伸入凹槽形成稳定的卡接状态,同时也不会影响万向轴的转动,防止万向轮组件在越障过程中脱落,从而达到稳定的移动效果。
附图说明
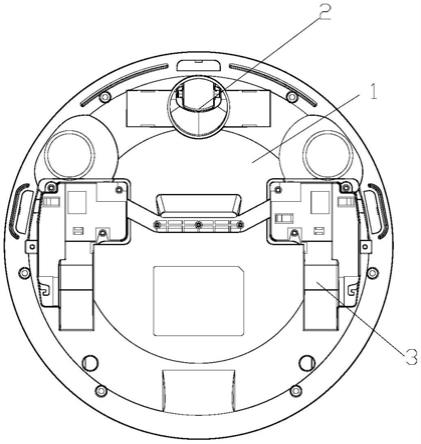
16.附图1为本发明一种自移动机器人的一个实施例的平面结构示意图;
17.附图2为图1所示自移动机器人的立体结构示意图;
18.附图3为图2所示a处放大结构示意图;
19.附图4为图1所示自移动机器人的剖视结构示意图;
20.附图5为本发明一种自移动机器人的另一个实施例的剖视结构示意图。
具体实施方式
21.为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本发明,并不用于限定本发明。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
22.需要说明的是,各个实施例之间的技术方案可以相互结合,但是必须是以本领域普通技术人员能够实现为基础,当技术方案的结合出现相互矛盾或无法实现时应当认为这种技术方案的结合不存在,也不在本发明要求的保护范围之内。
23.参见图1-4所示的本发明自移动机器人的一个实施例,包括:主体1,设置于主体底面的行进轮3和万向轮组件2。所述万向轮组件2包括:万向轮21和用以装载所述万向轮的万向轮支架22。万向轮22被设置为绕自身的轴转动,从而能在地面上滚动,万向轮支架22顶端设有用以带动所述万向轮支架水平转动的万向轴23,所述万向轴23上端设有沿所述万向轴周向设置的凹槽。万向轮22从而可以受万向轴23带动,从而进行行进方向改变。
24.所述主体1上设有用以装载所述万向轴23的通孔,所述通孔向主体内部延伸形成管体11,所述管体11顶端设有沿所述通孔径向设置的突出部 24,当万向轮组件2被装配到主体1上时,所述突出部24伸入所述凹槽内,但未抵接凹槽底端,以免干涉万向轴23转动。
25.通过在万向轴23上设置凹槽,并在主体1上用以装载万向轮的通孔上设置管体11,通过管体11上设置的突出部24伸入凹槽形成稳定的卡接状态,同时也不会影响万向轴23的转动,防止万向轮组件2在越障过程中脱落,从而达到稳定的移动效果。
26.在本实施例中,所述突出部24为垫片,所述垫片设有沿径向设置的安装槽,所述垫片沿所述安装槽方向插入所述凹槽,以方便拆装万向轮组件2。
27.在一个较佳实施例中,所述万向轴23上还套设有轴承12,所述万向轴23通过所述轴承12可转动地设于所述管体11内,以提高万向轴23的使用寿命,使得万向轴23更灵敏地转动。
28.在一个较佳实施例中,所述万向轴23的顶端设有用以防止所述突出部脱出的帽部231,当万向轴23若出现向上移动的情况时,突出部24抵接帽部231从而使得万向轴23不会脱出通孔。
29.在一个较佳实施例中,所述凹槽下端面被设置为用以引导所述突出部进入所述凹槽的斜面。
30.在一个较佳实施例中,如图3所示,所述突出部24与所述管体11为一体制造而成的,而管体11被设置为可拆装地连接于主体1上,从而可以降低万向轮支架22的制造成本,直接将万向轮支架22、万向轴23和突出部24一体制造,增加制造效率。
31.以上所述仅是本发明的优选实施方式,应当指出:对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应
视为本发明的保护范围。
技术特征:
1.一种自移动机器人,包括:主体,设置于主体底面的行进轮和万向轮组件,其特征在于:所述万向轮组件包括:万向轮;用以装载所述万向轮的万向轮支架,所述万向轮支架顶端设有用以带动所述万向轮支架水平转动的万向轴,所述万向轴上端设有沿所述万向轴周向设置的凹槽;所述主体上设有用以装载所述万向轴的通孔,所述通孔向主体内部延伸形成管体,所述管体顶端设有沿所述通孔径向设置的突出部,所述突出部伸入所述凹槽内。2.根据权利要求1所述的一种自移动机器人,其特征在于:所述突出部与所述管体为一体制造而成的。3.根据权利要求1所述的一种自移动机器人,其特征在于:所述突出部为垫片,所述垫片设有沿径向设置的安装槽,所述垫片沿所述安装槽方向插入所述凹槽。4.根据权利要求2或3所述的一种自移动机器人,其特征在于:所述万向轴上还套设有轴承,所述万向轴通过所述轴承可转动地设于所述管体内。5.根据权利要求4所述的一种自移动机器人,其特征在于:所述万向轴的顶端设有用以防止所述突出部脱出的帽部。6.根据权利要求5所述的一种自移动机器人,其特征在于:所述凹槽下端面被设置为用以引导所述突出部进入所述凹槽的斜面。
技术总结
本发明公开了一种自移动机器人,包括:主体,设置于主体底面的行进轮和万向轮组件,所述万向轮组件包括:万向轮;用以装载所述万向轮的万向轮支架,所述万向轮支架顶端设有用以带动所述万向轮支架转动的万向轴,所述万向轴上端设有沿所述万向轮周向设置的凹槽;所述主体上设有用以装载所述万向轴的通孔,所述通孔向主体内部延伸形成管体,所述管体顶端设有沿所述通孔径向设置的突出部,所述突出部伸入所述凹槽内。通过在万向轴上设置凹槽,并在主体上用以装载万向轮的通孔上设置管体,通过管体上设置的突出部伸入凹槽形成稳定的卡接状态,同时也不会影响万向轴的转动,防止万向轮组件在越障过程中脱落,从而达到稳定的移动效果。从而达到稳定的移动效果。从而达到稳定的移动效果。
技术研发人员:朱帅
受保护的技术使用者:深圳市云视机器人有限公司
技术研发日:2021.07.12
技术公布日:2022/1/21