1.本发明涉及一种面处理设备,具有设备壳体和通过关节可枢转地支承在设备壳体上的把手,其中,所述把手具有操作装置,所述操作装置具有多个操作元件,用于通过用户设置所述面处理设备的运行功能,其中,第一操作元件设计用于设置第一运行功能,并且第二操作元件设计用于设置第二运行功能,并且其中,所述把手在相对于设备壳体的至少两个位置中能够被锁止。
背景技术:
2.面处理设备在现有技术中充分已知。面处理设备常常具有可枢转地支持的把手,以便面处理设备可以应用于不同的处理任务,例如用于处理地面或者用于处理高于地面的面。把手例如可以为了地面处理而沿设备壳体的延长线定向,以便可以舒适基于用户的站立姿势将地面处理设备立在待处理的地面上。另一方面,把手可以转附到设备壳体上,以便实现紧凑的面处理设备,其尤其可由用户拿着用于高于地面的处理工作。把手为了固定所选的位置通常借助锁止元件保持在位置上,从而避免不希望的松脱。例如文献ep 2 220 986 b1(us 8,028,373 b2)和de 10 35 330 b公开了具有可枢转的把手的面处理设备。
3.此外已知,在面处理设备的把手上布置操作装置,该操作装置例如具有用于面处理设备的电机的开关按钮和附加的操作元件、例如选择开关,用于选择面处理设备的确定的操作功能。这种选择开关例如用于设置电机和/或风扇的确定的功率等级、旋转的面处理元件的转速、用于在待处理的面上施加液体的泵的输送功率或其它功能。
4.尽管操作装置在面处理设备的把手上的布置已能够实现用户对面处理设备的舒适的操纵,但是如果把手相对于设备壳体枢转,则操作装置的操纵对于用户会发生变化。随后用户发现,在使用面处理设备时操作装置相对于用户手部是另一种布置方式。由此,用户必须在把手枢转之后关于操作元件针对各个运行功能的位置转变想法或者说重新考虑,这导致不舒服,并且另一方面也可能导致触发对于面处理无意义的或甚至负面的、不希望的运行功能。
技术实现要素:
5.因此从上述现有技术出发,本发明所要解决的技术问题在于,设计一种舒适的具有可枢转的把手的面处理设备,也就是在布置于可枢转的把手上的操作元件的操纵方面。
6.为了解决前述技术问题按照本发明建议,所述面处理设备具有评估和控制装置,所述评估和控制装置设置用于根据所述把手相对于设备壳体的当前位置改变运行功能与操作元件的配属关系,使得配属于操作元件的运行功能被调换,并且与把手的当前位置无关地在所述设备壳体相对于用户以通常的手部位置抓握在把手上的手部具有相同取向的情况下,用户能够借助对所述第二操作元件的操作设置在所述枢转之前配属于所述第一操作元件的相同的运行功能,以及能够借助对所述第一操作元件的操作设置在所述枢转之前配属于所述第二操作元件的相同的运行功能。
7.按照本发明,评估和控制装置根据把手的当前的枢转位置使操作装置的操作元件占有运行功能。由此,用户可以直观地按照习惯使用面处理设备和尤其操作装置,并且以已知的方式和方法以通常习惯的手持位置在把手的所有为此定义的位置中触发运行功能。用户不再需要转变想法并且不再需要考虑把手当前相对于设备壳体或他的手部处于哪个位置,并且随后不再需要检测,配属确定的运行功能的操作元件当前相对于设备壳体或用户的手部处于哪个位置。评估和控制装置设置为,如此切换在操作装置的不同的操作元件与实施运行功能的配属的设备元件之间的信号路径,使得相同的运行功能可以分别通过操作元件被触发,操作元件处于相对于用户手部的基本上相同的位置。如果用户将把手例如相对于设备壳体枢转180度,则之前例如借助操作装置的离面处理设备的关节最远的操作元件设置的运行功能现在能够通过离关节最近的操作元件设置。在此,用户的手部相对于面处理设备的取向基本上不发生改变,尤其甚至是在面处理过程中设备壳体相对于待处理的面的取向方面。
8.所述操作装置例如可以具有具备光学地显示出的操作元件的触摸屏和/或由机械的操作元件组成的阵列。如果操作装置是触摸屏,则操作元件例如可以在触摸屏上通常图形化地显示,其中,用户随后接触触摸屏的相应的局部区域,以便触发确定的对应的运行功能。控制和评估装置切换触摸屏上的显示操作元件的局部区域,由此用户与把手相对于设备壳体的当前位置无关地始终能找到操作装置的针对运行功能的设置的相同的可操作性。备选或附加地,操作装置也可以具有机械的操作元件,这些操作元件例如根据按钮和/或旋钮的方式构造。从操作元件至面处理设备的相应的功能元件的信号路径的切换则同样地如之前在触摸屏方面所述一样地实现。借助所述操作元件可设置的面处理设备的运行功能例如可以是激活或者停用耗电器、设置耗电器的功率等级、或者设置机械的面处理元件的功率等级或参照设备壳体的相对位置。面处理设备的通过操纵操作元件可激活的耗电器例如可以是用于风扇或用于面处理元件的电机、例如旋转的清洁刷、摆动的擦拭板或抛光板、割草机刀片、或类似部件。此外,耗电器也可以是传感器元件,或者照明器件,该照明器件用于照亮面处理设备的周围环境或者局部区域。除了开关耗电器,可以通过相同的操作元件、或者也通过操作装置的另外的操作元件直接或间接地设置耗电器的功率等级,例如抽吸功率、处理强度、旋转的面处理元件的转速、照明器件的亮度或其它。此外,操作元件也可以规定,借助操作元件可以设置机械的面处理元件相对于面处理设备的设备壳体的相对位置,例如旋转的刷毛辊的位置,其中面处理元件作用于或接触待清洁的面,或者不作用于或接触待清洁的面。
9.所述评估和控制装置设置用于改变运行功能与操作元件的配属关系,使得与把手的当前位置无关地在所述设备壳体相对于用户以通常的手部位置抓握在把手上的手部具有相同取向的情况下,用户能够借助对所述第二操作元件的操作设置在枢转之前配属于所述第一操作元件的相同的运行功能。由此,与操作元件相对于面处理设备的当前取向无关地可以实现对操作装置的直观的可操作性。如果操作装置例如仅仅具有两个操作元件并且把手能够枢转到两个以180度相对彼此定向的锁止位置中,则之前配属于两个操作元件的运行功能简单地调换,使得之前通过第一操作元件可触发的第一运行功能现在能够通过第二操作元件被触发。操作装置也可以具有三个或更多个操作元件,并且把手也可以枢转到多于两个的锁止位置中。随后,分别确定操作元件相对于面处理设备的运行功能的适宜的
关联,该关联与用户在把手上的通常的手部位置一致或者最接近。重要的是,在把手相对于面处理设备的枢转位置改变时用户不必在配属操作元件的运行功能方面转变想法。
10.面处理设备优选地构造为,所述把手借助所述关节能够枢转到两个定义的锁止位置中,所述锁止位置优选彼此间隔180度的枢转角度。在这种情况下,配属操作元件的运行功能可以简单地镜像设置,因为例如上次最接近关节的操作元件现在是最远离关节的操作元件。通过该设计方案,所述把手相对于设备壳体可以处于两个彼此相对置的位置中,也就是例如在设备壳体的纵向延伸段的延长线中得到的位置和枢转后进入的位置,在该枢转后进入的位置中把手基本上靠近设备壳体枢转,尤其参照相对于纵向延伸段正交指向的投影位于设备壳体的外轮廓以内。在把手枢转后的情况下,面处理设备优选可以用作可携带的设备,该设备在面处理期间从待处理的面抬起并且可以作为紧凑的单元沿着高于地面的面导引。
11.此外建议,所述面处理设备具有探测装置,用于探测所述把手相对于设备壳体的当前位置。探测装置将探测结果传输给面处理设备的评估和控制装置,所述评估和控制装置接下来将运行功能与操作元件相配属。
12.所述探测装置可以布置在所述把手和/或所述设备壳体和/或设计用于将把手在锁止位置上锁止的锁止元件上。探测装置的共同作用的子元件尤其也可以例如一方面布置在把手上并且另一方面布置在设备壳体上。这种元件例如可以是光学的探测装置的光源和光接收器。在机械可开关的接触传感器的情况下,把手的局部面和设备壳体的局部面可以共同作用。探测装置的至少一部分尤其优选也可以配属于把手的或设备壳体的锁止元件,所述锁止元件在把手的定义的锁止位置中用于锁止把手并且由此在把手按规定地枢转时强制地在终端位置与对应的部分区域相接触。
13.所述探测装置可以设置为,机械地、光学地、磁性地、电气地和/或电磁地探测所述把手的当前位置。所述探测装置尤其可以具有微动或者说微型开关、接触传感器、惯性传感器、磁场传感器和/或光电元件。微型开关尤其可以节省空间地集成在把手的局部区域中或者设备壳体的局部区域中,其中,当把手到达相对于设备壳体的定义的位置时,所述微型开关被接通。接触传感器以相同的方式方法工作。如果使用惯性传感器,则惯性传感器例如可以是加速度传感器。例如霍尔传感器属于所建议的磁场传感器,该霍尔传感器同样可以识别定义的锁止位置。也可以使用光电元件、例如光电二极管或者整个二极管阵列,以便探测把手相对于设备壳体的当前位置。
14.所述探测装置可以设置为,探测在至少一个定义的锁止位置中的所述把手的位置。根据特别的设计方案可以规定,所述探测装置设置为,在所述把手的确定的枢转角度范围中无级地测量所述把手的位置。尤其例如可以在围绕关节的360度的角度范围中测量把手的位置。通过这种设计方案,探测装置也可以获得关于错误位置的地点的信息,该错误位置相当于把手不在定义的锁止位置。这种错误位置可能位于两个终端位置之间。为了探测把手的这种在定义的锁止位置以外的位置,例如可以使用光学的测量装置,其中,把手具有光源并且由多个单独的光电二极管组成的二极管阵列环绕地围绕关节地布置在设备壳体上,使得在任何时候都知道关于把手的当前位置。这种无级的测量结果也可以借助惯性传感器或磁场传感器实现。
附图说明
15.以下结合实施例进一步阐述本发明。在附图中:
16.图1示出按照本发明的面处理设备,其具有通过关节可枢转的把手,
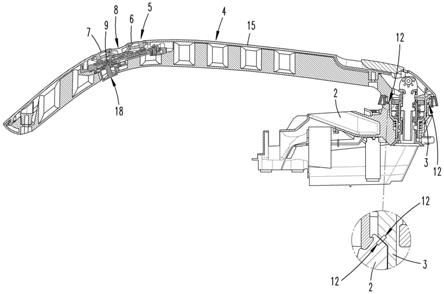
17.图2示出剖切把手的纵剖面图,
18.图3示出把手的分解图。
具体实施方式
19.图1示例性地示出面处理设备1,所述面处理设备在此例如设计为清洁设备,即,在此例如设计为手持的吸尘器。面处理设备1具有基础设备14和用于附加设备的连接区域13。附加设备例如可以是吸嘴,所述吸嘴具有马达驱动的面处理元件。本发明不局限于在此示例性地示出的面处理设备1,而是也可以用于另外的面处理设备1,例如用于湿式擦洗设备、抛光设备、割草设备或其它设备。面处理设备1还可以以通常的方式方法通过电网插头与家用电源连接和/或具有用于提供用于耗电器的电能的(未示出的)蓄电池。
20.面处理设备1既可以有附加设备参与地运行,也可以没有附加设备参与地运行。面处理设备1例如可以与附加设备一同用于对地面实施地面支承的处理,同时面处理设备1备选地也可以单独地,也就是可以不具有与其连接附加设备地被使用,例如用于有利地实施高于地面的处理。这种高于地面的处理例如可以是清洁或保养架子、踢脚线或类似物。基础设备14具有设备壳体2和相对于设备壳体2围绕关节可枢转的把手4。用户可以在把手4上在通常的处理运行期间导引面处理设备1,例如在待处理的面上滑动。在此,用户通常通过沿彼此相反的前进方向交替地推拉面处理设备1。在把手4上布置有操作装置5,所述操作装置具有多个操作元件6、7、8、18。操作元件6、7、8、18具有作为面处理设备1的马达的启动和关闭开关的操作元件8,以及两个另外的操作元件6、7,在此通过所述另外的操作元件例如可以选择面处理设备1的风扇马达的功率等级。操作元件6在此相当于提高功率,同时操作元件7相当于降低功率。在把手4的背侧存在另外的操作元件18。所述操作元件6、7、8、18也可以配属面处理设备1的其他运行功能,例如激活面处理元件、选择节能模式或者类似功能。为了阐述本发明,将配属于第一操作元件6的功能称为“第一运行功能”,并且将配属于第二操作元件7的功能配属于“第二运行功能”。相应地,第三操作元件8用于设置“第三运行功能”。这些运行功能原则上可以涉及面处理设备1的其它装置,例如不同的耗电器或者面处理元件,或者甚至同一耗电器或面处理元件的不同的功率等级或者其它的设置。操作装置5配有评估和控制装置9,所述评估和控制装置将操作元件6、7、8、18可变地配属于确定的运行功能,即根据把手4相对于设备壳体2的当前位置。在把手4上在下侧布置的操作元件18与把手4的目前的位置无关地保留其运行功能。
21.把手4如图1所示地围绕关节3可枢转,所述关节3布置在基础设备14的设备壳体2与把手4之间。关节3用于把手4相对于设备壳体2枢转到在此例如两个定义的锁止位置10、11中,所述锁止位置通过180度的枢转角度α相间隔。图1(用实线)示出把手4的第一锁止位置10,在第一锁止位置中把手4沿基础设备14的纵向延伸段的延长线定向,使得用户可以这样竖立导引面处理设备1,即附加设备支承在待处理的地面上。在此用虚线示出的第二锁止位置11相对第一锁止位置10以枢转角度α相间隔,使得把手4参照视图的视角枢转到设备壳体2的周轮廓中。在该位置中,用户可以将面处理设备1优选用于高于地面的处理,其中紧凑
的、可携带的面处理设备1是有利的,面处理设备的重心靠近用户的手部。关节3在此可以配有未详细示出的锁止元件,以便固定定义的锁止位置10、11,锁止元件例如是卡止件,其可以嵌入把手4的对应的卡止区域内。由此可以防止把手4意外离开已到达的锁止位置10、11并且用户失去对面处理设备1的控制。
22.为了使得评估和控制装置9能将运行功能配属于操作元件6、7、8、18,面处理设备1具有探测装置12,所述探测装置设置用于探测把手4相对于设备壳体2的当前位置。探测装置12在此例如具有对应地布置在设备壳体2和把手4上的传感器元件,所述传感器元件在锁止位置10、11中相互对置。所述传感器元件可以是光学的发射器/接收器、接触元件或类似部件。探测装置12向评估和控制装置9传输测得的探测信号,所述评估和控制装置接着确定把手4的当前位置并且根据在面处理设备1的存储器内的固定的配属关系使运行功能如此与操作元件6、7、8、18相配属,使得用户能够以通常的方式和方法并且与把手4的当前位置无关地直观地使用布置在把手4上的操作装置5,也就是例如可以通过在把手4上的不变的手部位置提高功率等级。用户不必重新思考把手4当前如何相对于设备壳体2布置,以便接着寻找用于其运行功能意愿的适合的操作元件6、7、8、18。
23.探测装置12例如也可以是微型开关,该微型开关布置在设备壳体2的局部区域上或局部区域内,并且可以通过与把手4的对应的局部区域相接触被接通。探测装置12配属至少一个定义的锁止位置10、11。如果探测装置12仅配属于多个、尤其两个定义的锁止位置10、11中的第一锁止位置,则探测装置12或者探测把手4处于定义的第一锁止位置10、11,或者探测把手4不在定义的第一锁止位置10、11中。如果探测到把手4不处于定义的第一锁止位置10、11,则随后可以推断,把手处于另一个锁止位置10、11、尤其第二锁止位置10、11中。作为特别的实施方式,探测装置12也可以配属于多个定义的锁止位置10、11中的每一个。在最后一种情况下,例如每个定义的锁止位置10、11都配有微型开关,使得当把手4占据多个定义的锁止位置10、11中的一个时,评估和控制装置9获得对此的认知。相对于微型开关备选地,也可以考虑探测装置12的其它形式,以便探测把手4相对于设备壳体2的当前位置。所述的其它形式在此例如是接触传感器、加速度传感器、位置/定位传感器、光学传感器、磁性传感器、机械传感器、电磁传感器和类似器件。根据探测装置12的形式,也可以无级地探测把手4的当前位置,例如方法是,由布置在把手4上的光源发射的光信号接触光电二极管阵列或者ccd芯片,其面状地围绕关节3布置在设备壳体2上。这种实施方式的优点在于,对应于不在定义的锁止位置10、11的故障位置也可以被探测到。
24.如在图2和3中详细示出地,把手4具有上把手件15和下把手件16,上把手件和下把手件共同限定出空腔的边界,在该空腔内布置有用于评估和控制装置9以及操作元件6、7、8、18的固持件17。
25.本发明如此工作,即,用户使用面处理设备1例如首先用于处理地面。在此,把手4如图1所示地沿基础设备14的延伸线定向。这相应于把手4的第一锁止位置10。在该位置中操作装置5如此定向,使得操作装置5上的第一操作元件6最接近连接区域13,也就是参照面处理设备1的所示位置在操作装置5上位于下方,并且第二操作元件7位于相反的方向上,也就是远离连接区域13的方向。用户通过第一操作元件6可以在在此所述的示例中例如提高面处理设备1的风扇马达的功率。用户通过第二操作元件7可以降低功率。当用户将把手4现在相对于设备壳体2枢转时,也就是以180度枢转角度α枢转时,接下来把手4处于相反的取
向,也就是把手4在图1中用虚线表示的位置。通常,操作装置5的操作元件6、7相对于面处理设备1的基础设备20的位置由此就会被反转,使得第一操作元件6参照图1的视角布置在第二操作元件7上方。由此就会强制用户重新考虑并注意,提高功率等级的操作元件6现在布置在第二操作元件7的上方。但是通过本发明则避免了上述情况。
26.因此按照本发明,探测装置12探测到把手4离开第一锁止位置10并且已达到第二锁止位置11。根据在存储的文件中保存的与位置相关的运行功能的配属关系,面处理设备的评估和控制装置9改变运行功能与操作元件6、7、8、18的关联。由此,评估和控制装置9如此设置面处理设备1的运行功能与操作元件6、7、8、18的配属关系,使得用户可以与把手4的当前位置无关地实施他通常的手部运动,以便设定相应的运行功能。由此,用户可以与把手4的当前位置无关地在他手部相对于设备壳体2采取相同取向下现在用第二操作元件7设置确定的运行功能,该运行功能之前由用户例如通过第一操作元件6设置,所述第二操作元件7相对于用户手部的位置和定向现在处于之前(在把手4枢转之前)第一操作元件6曾经所处的位置。由此整体上,操作装置5的功能方式随着把手4的位置改变而改变。配属于操作元件6、7、8、18的运行功能相对彼此如此重新编组,使得用户与把手4的当前枢转位置无关地可以通过相对于面处理设备1的相同的手部位置实施确定的运行功能,如在把手4枢转之前那样。
27.附图标记列表
[0028]1ꢀꢀꢀꢀꢀꢀꢀ
面处理设备
[0029]2ꢀꢀꢀꢀꢀꢀꢀ
设备壳体
[0030]3ꢀꢀꢀꢀꢀꢀꢀ
关节
[0031]4ꢀꢀꢀꢀꢀꢀꢀ
把手
[0032]5ꢀꢀꢀꢀꢀꢀꢀ
操作装置
[0033]6ꢀꢀꢀꢀꢀꢀꢀ
操作元件
[0034]7ꢀꢀꢀꢀꢀꢀꢀ
操作元件
[0035]8ꢀꢀꢀꢀꢀꢀꢀ
操作元件
[0036]9ꢀꢀꢀꢀꢀꢀꢀ
评估和控制装置
[0037]
10
ꢀꢀꢀꢀꢀꢀ
锁止位置
[0038]
11
ꢀꢀꢀꢀꢀꢀ
锁止位置
[0039]
12
ꢀꢀꢀꢀꢀꢀ
探测装置
[0040]
13
ꢀꢀꢀꢀꢀꢀ
连接区域
[0041]
14
ꢀꢀꢀꢀꢀꢀ
基础设备
[0042]
15
ꢀꢀꢀꢀꢀꢀ
上把手件
[0043]
16
ꢀꢀꢀꢀꢀꢀ
下把手件
[0044]
17
ꢀꢀꢀꢀꢀꢀ
固持件
[0045]
18
ꢀꢀꢀꢀꢀꢀ
操作元件
[0046]
α
ꢀꢀꢀꢀꢀꢀꢀ
枢转角度