1.本实用新型属于炭块清理工具技术领域,具体涉及一种用于焙烧阳极碳块表面清理装置。
背景技术:
2.铝用阳极炭块在焙烧工艺及焙烧过程中,焙烧填充料等会粘结在炭块的炭碗、凸台、螺旋槽、外表面等部位。工艺需要对炭块炭碗、螺旋槽、上凸台、上面、长面、端面进行清理作业,以达到电解和阳极组装的使用要求。一直以来,出炉炭块的清理作业一直由人工完成,其劳动强度大,并且受其高温、高粉尘环境影响,对从业人员保护是挑战。另外,人工清理大多采用离线形式进行,即把炭块从生产线上由堆垛天车吊运下来,在特定的区域进行人工清理,清理完成后,再由堆垛天车进行仓库堆垛。占用空间,同时,堆垛天车需要频繁地进行倒垛作业,增加其工作量。
技术实现要素:
3.本实用新型的目的在于提供一种执行效率高、清理效果好的用于焙烧阳极碳块表面清理装置。
4.为实现上述目的,本实用新型采用如下技术方案:一种用于焙烧阳极碳块表面清理装置,包括用于采集炭块的位置信息的3d机器视觉相机、用于接收3d机器视觉相机采集的位置信息并进行分析处理的控制器、执行控制器下发的控制指令对炭块进行清理的炭块清理机构,3d机器视觉相机的信号输出端连接控制器的信号输入端,控制器的信号输出端连接炭块清理机构的控制信号输入端;所述炭块清理机构包括六轴机器人,所述六轴机器人的机械臂上通过连接座连接清扫工具,清扫工具包括用于清扫炭块中的炭碗的清扫部ⅰ、用于清扫炭块四周侧面的清扫部ⅱ、用于清扫炭块上面和凸台的清扫部ⅲ。
5.优选的,所述清扫部ⅰ包括安装在连接座上的清扫电机ⅰ、固定连接在连接座底部的振动器安装板、设置在振动器安装板上且与炭块上螺纹槽分布及数目一致的振动器、与清扫电机ⅰ的动力输出轴ⅰ连接的刀架、浮动连接在刀架上的炭碗清理刀头,清扫电机ⅰ的动力输出轴ⅰ竖向贯穿振动器安装板后连接与刀架连接,沿所述周向设有至少2组用于安装炭碗清理刀头的安装板ⅰ,所述安装板ⅰ上开设有销孔ⅰ,所述炭碗清理刀头上开设有与销孔ⅰ配合使用的长条孔,炭碗清理刀头通过销轴连接在安装板ⅰ上,在清扫电机ⅰ的驱动下炭碗清理刀头ⅰ可相对安装板ⅰ发生前后浮动,以使炭碗清理刀头ⅰ紧贴炭碗ⅰ内壁。
6.优选的,所述振动器包括振动器筒、套设于振动器筒内的振动器轴、与振动器轴连接的振动铲,振动器筒安装在振动器安装板上,振动铲贯穿振动器安装板并向下延伸,振动铲为带有柔性件的长条型螺纹工具,柔性件为弹簧ⅰ,弹簧ⅰ设置在振动器轴与振动铲的连接处。
7.优选的,所述清扫部ⅱ包括安装在连接座上的清扫电机ⅱ、安装在连接座上的行星箱、设置在行星箱内与清扫电机ⅱ的动力输出轴ⅱ连接主动齿轮、设置在行星箱内且与
主动齿轮啮合连接的若干个从动齿轮、与相应从动齿轮的转轴连接的用于安装立面清理刀头的安装板ⅱ,所述安装板ⅱ四周边缘位置开设4个安装槽,4个安装槽中的相邻的2个安装槽相互垂直,安装槽开设有装配孔ⅰ,立面清理刀头上开设有装配孔ⅱ,立面清理刀头通过锁紧螺栓固定连接在安装板ⅱ上的相应安装槽内。
8.优选的,所述行星箱设在连接座的左侧面,清扫电机ⅱ的动力输出轴ⅱ从行星箱顶部伸入并与行星箱内的主动齿轮连接,从动齿轮的转轴从行星箱底部伸出与转盘固定连接,安装板ⅱ固定连接在转盘上;行星箱顶部与转轴相应位置开设有容纳转轴的容纳孔,所述转轴远离转盘的一端从容纳孔出伸出行星箱;所述从动齿轮的转轴可相对容纳孔伸缩活动,以使立面清理刀头具有上下位置的柔性动作;所述容纳孔处设有用于检测立面清理刀头浮动位置的刀头位置检测器。
9.优选的,所述清扫部ⅲ包括与炭块上的凸台相适配的呈锥体结构的打磨轮和驱动打磨轮转动的清扫电机ⅲ,所述打磨轮的两侧分别与u型结构的打磨轮安装架的两侧框架转动连接,打磨轮安装架通过弹簧垫块固定安装在连接座的前侧面上。
10.进一步的,还包括运送炭块的炭块输送机构、用于检测炭块是否运动到指定位置的炭块位置检测器、设置在炭块输送机构下方用将运动到指定位置处的炭块顶起固定的炭块顶升定位机构,所述炭块位置检测器的信号输出端与控制器的信号输入端连接,控制器的信号输出端连接炭块输送机构、炭块顶升定位机构的执行信号输入端。
11.进一步的,所述炭块输送机构包括输送架、转动连接在输送架上的输送辊、驱动输送辊转动的输送电机。
12.进一步的,所述炭块顶升定位机构包括设置在输送架下放的顶升下机架、设置在顶升下机架上的且动力输出朝上的升降气缸,所述升降气缸的动力输出端连接倒u型结构的顶升上机架,所述顶升上机架的两侧竖板宽度小于相邻输送辊之间的间距。
13.与现有技术相比,本实用新型的有益效果为:
14.1.本实用新型采用3d机器视觉相机进行视觉测量和定位,3d机器视觉相机用于测量炭碗位置、螺旋槽位置、炭块高度及外围轮廓尺寸,引导炭块清理机构对各清理部位的精确测量定位,炭块清理机构采用六轴工业机器人为运动执行机构配合复合式多刀头工具设计,刀头驱动全部采用压缩空气动力,安全可靠动力足,由控制器采用plc作集中控制,设计充分考虑系统工作节拍、工作效率,具有可靠性高、动作速度快、柔性强的优点。
15.2. 本实用新型整体占地空间小、结构布署紧凑配合炭块输送机构、炭块顶升定位机构,炭块清理结束后,炭块顶升定位机构复位释放炭块,通过炭块输送机构将炭块输送至下一工位,大大提高工作效率,智能自动化程度高。
附图说明
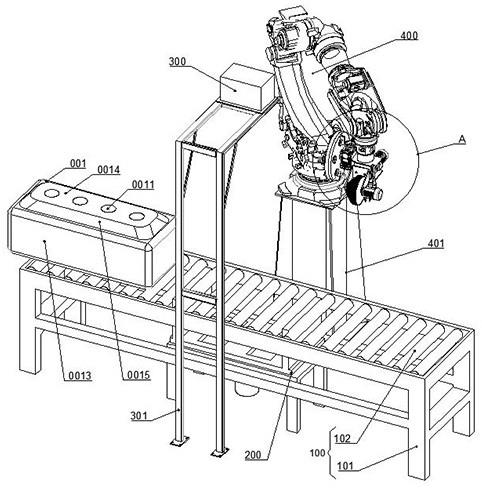
16.图1为本实用新型的结构示意图;
17.图2为图1中a的放大示意图;
18.图3为本实用新型中的连接座的结构示意图;
19.图4为本实用新型中的清扫部ⅰ、清扫部ⅱ、清扫部ⅲ与连接座连接的结构示意图;
20.图5为本实用新型中的清扫部ⅰ与连接座组装的结构示意图;
21.图6为本实用新型清扫部ⅰ中的刀架的结构示意图;
22.图7为本实用新型的刀架与炭碗清理刀头组装的结构示意图;
23.图8为本实用新型中的清扫部ⅱ中行星箱的内部结构示意图;
24.图9为本实用新型中的转盘的结构示意图;
25.图10为本实用新型中的清扫部ⅲ与连接座连接的结构示意图;
26.图11为本实用新型中的炭块顶升定位机构的结构示意图;
27.图中:炭块001,炭碗0011,外立面0013,炭块上面0014,凸台0015,炭块输送机构100,输送架101,输送辊102,炭块顶升定位机构200,顶升下机架201,顶升上机架202,升降气缸203,3d机器视觉相机300,相机支架301,六轴机器人400,机器人底座401,连接座500,清扫部
ⅰ‑
600,清扫电机
ⅰ‑
601,振动器安装板602,振动器603,振动器筒6031,振动铲6032,刀架604,安装板
ⅰ‑
6041,炭碗清理刀头605,清扫部
ⅱ‑
700,清扫电机
ⅱ‑
701,行星箱702,主动齿轮703,从动齿轮704,转盘705,安装板
ⅱ‑
706,外立面清理刀头707,清扫部
ⅲ‑
800,清扫电机
ⅲ‑
801,打磨轮802,打磨轮安装架803,弹簧垫块804,刀头位置检测器900。
具体实施方式
28.如图1-11所示,一种用于焙烧阳极碳块表面清理装置,包括运送炭块001的炭块输送机构100、用于检测炭块001是否运动到指定位置的炭块位置检测器、设置在炭块输送机构100下方用于将运动到指定位置处的炭块001顶起固定的炭块顶升定位机构200、用于采集炭块顶升定位机构200顶起的炭块001的位置信息的3d机器视觉相机300、用于接收3d机器视觉相机300采集的炭块001的位置信息并进行分析处理的控制器、执行控制器下发的控制指令对炭块001进行清理的炭块清理机构,炭块位置检测器、3d机器视觉相机300的信号输出端连接控制器的信号输入端,控制器的信号输出端连接炭块输送机构100、炭块顶升定位机构200、炭块清理机构的控制信号输入端。
29.作为本实施例优选的实施方式,炭块输送机构100包括输送架101、转动连接在输送架上的输送辊102、驱动输送辊102转动的输送电机(图中未显示),炭块输送机构100可以采用市场上售卖的成品或定制品。
30.作为本实施例优选的实施方式,炭块位置检测器为红外接近开关,炭块位置检测器安装在输送架101上,当炭块位置检测器检测到炭块001移动到指定位置处时(炭块清理工位),炭块位置检测器将检测到的信号发送给控制器,控制器控制输送电机停止运行,同时控制炭块顶升定位机构200动作,将炭块001顶升至指定高度。
31.作为本实施例优选的实施方式,如图11所示,炭块顶升定位机构200包括设置在输送架101下放的顶升下机架201、设置在顶升下机架201上的且动力输出朝上的升降气缸203,炭块顶升定位机构200设置在炭块输送机构100中的炭块清理工位的正下方,升降气缸203的动力输出端连接倒u型结构的顶升上机架202,顶升上机架202的两侧竖板宽度小于相邻输送辊102之间的间距。炭块顶升定位机构200采用气动顶升装置,用于对被清理炭块001的定位和限位,便于炭块清理机构对炭块清理工位处的炭块001进行清理,以保证在清理期间炭块001不被移动。
32.当炭块顶升定位机构200接收到控制器的动作指令时,升降气缸203的活塞杆伸出,顶升上机架202的两侧竖板从相邻输送辊102之间的间隙处伸出,升降气缸203的活塞杆伸出到位后,顶升上机架202将炭块清理工位处的炭块001顶升至指定高度并定位,接着3d
机器视觉相机300对炭块清理工位处的炭块001进行外观轮廓的测量和定位,测量出炭碗0011中心坐标、螺旋槽分布坐标值数据信息发送给控制器,控制器接收3d机器视觉相机上传数据信息后,控制炭块清理机构对炭块001的外立面0013(四周侧面)、炭块上面0014、凸台0015、炭碗0011及螺旋槽进行清理作业。炭碗内部有螺旋槽时则在对炭碗清理的同时,可以一并对螺旋槽进行清理。
33.作为本实施例优选的实施方式,3d机器视觉相机300通过相机支架301设置在输送架101一侧,3d机器视觉相机300的摄像头位于炭块清理工位的正上方,方便3d机器视觉相机300采集被炭块顶升定位机构200顶起的炭块001的位置信息。
34.3d机器视觉相机测量点位:
35.(1)炭碗中心坐标;(2)炭碗螺旋槽坐标位置;(3)炭块上面及上凸台高度及平面坐标值;(4)炭块长面、端面坐标值。
36.3d机器视觉相机的视觉区域呈光束扩散型,可以覆盖炭块清理工位处的炭块所处位置区域以及炭块清理机构的清理区域,便于控制器操作机器人完成清理作业。
37.采用3d机器视觉相机300对炭块清理工位处的炭块001进行外观轮廓的测量和定位,为了确保3d机器视觉相机300能够在炭块出炉后的高温高粉环境中可靠运行,本实施例中的3d机器视觉相机300的视觉镜头采用密闭式正压设计,即,在镜头组封装内通纯净压缩空气,使其始终保持向外的正压,使粉尘不至于进入镜头组内,灰尘防护效果好。另外,正压压缩空气具有一定的强制风冷作用,根据现场工作时的温度情况,可以通过调节压缩空气通风量和压力,以使镜头工作在额定工作温度内。
38.本实施例中的3d机器视觉相机300内部系统嵌入自学习算法、边界控制与算法冗余、底层的图像识别技术算法。自学习算法是根据炭块001的特性而开发的特殊测量算法,保证关键测量点的精度和准确性。边界控制与算法冗余,根据多传感器测量数据和边界阈值,确定炭块尺寸偏差在经验范围内,避免机器人作业动作范围越界。底层的图像识别技术算法,通过底层的算法更改,针对炭块产品图像特征的算法设计,是3d机器视觉具备工况条件应用的重要因素。3d机器视觉相机300系统算法采用多维度、多数据比对的方式,并设置多道阈值,从而保证即使出现测量误差,也能够限定在合理的误差范围内,超出阈值的测量数据,系统则多次测量,多次都不在阈值范围内,系统报警。
39.作为本实施例优选的实施方式,炭块清理机构包括六轴机器人400,六轴工业机器人各关节设计伸缩灵活,六轴机器人400的机械臂上连接有连接座500,连接座500上连接有清扫工具,清扫工具包括用于清扫炭块中的炭碗和螺旋槽的清扫部
ⅰ‑
600、用于清扫炭块外立面(四周侧面)的清扫部
ⅱ‑
700、用于清扫炭块上面和凸台的清扫部
ⅲ‑
800。
40.本实施例中的六轴机器人400安装在机器人底座401上,机器人底座401设置在输送架101另一侧,且与相机支架301对称设置。其中机器人底座401采用化学锚栓直接固定于车间地面上,安装方便,坚固可靠。
41.如图5所示,清扫部
ⅰ‑
600包括安装在连接座500上的清扫电机
ⅰ‑
601、固定连接在连接座500底部的振动器安装板602、设置在振动器安装板602上且与炭块001上螺纹槽分布及数目一致的振动器603、与清扫电机
ⅰ‑
601的动力输出轴ⅰ连接的刀架604、浮动连接在刀架604上的炭碗清理刀头605,常规的每个炭碗0011的内壁处皆有6组螺旋槽,因此,本实施例中的振动器603为六组。
42.作为本实施例优选的实施方式,振动器603包括振动器筒6031、套设于振动器筒6031内的振动器轴、与振动器轴连接的振动铲6032,振动器筒6031安装在振动器安装板602上,振动铲6032竖向贯穿振动器安装板602并向下延伸,振动铲6032为带有柔性件的长条型螺纹工具,柔性件为弹簧ⅰ,弹簧ⅰ设置在振动器轴与振动铲6032的连接处。
43.采用振动器603清理螺旋槽,清理时振动铲6032具有上下运动及振动运动的状态,配以柔性件,确保对螺旋槽的清理效果和清理效率。
44.清扫电机
ⅰ‑
601的动力输出轴ⅰ竖向贯穿振动器安装板602中心后与刀架604连接,沿刀架604周向设有至少2组用于安装炭碗清理刀头605的安装板
ⅰ‑
6041。
45.如图6-7所示,本实施例中的安装板
ⅰ‑
6041有三组,三组安装板
ⅰ‑
6041上皆开设有销孔ⅰ,炭碗清理刀头605上开设有与销孔ⅰ配合使用的长条孔,炭碗清理刀头605通过销轴连接在安装板
ⅰ‑
6041上,在清扫电机
ⅰ‑
601的驱动下炭碗清理刀头605受离心力向外甩出,炭碗清理刀头605可相对安装板
ⅰ‑
6041发生前后浮动,即便炭碗内壁渣子薄厚分布不同,炭碗清理刀头605仍然能够紧贴炭碗001内壁。
46.炭碗清理刀头605采用涂层刀具材料,硬质合金或高速钢刀具通过化学或物理方法在其上表面涂覆一层耐磨性好的难熔金属化合物,既能提高刀具材料的耐磨性,而又不降低其韧性。
47.炭碗清理刀头605与安装板
ⅰ‑
6041的连接方式采用轴销式旋转自适应设计,即炭碗清理刀头605在炭碗001内旋转时,依靠离心力使炭碗清理刀头605自动张开,并紧贴炭碗001内壁,保证炭碗001的清理效果,对顽固性渣子的清理更具效果。
48.同时,考虑炭碗清理刀头605磨损的补偿作用,采用自适应设计,即在炭碗清理刀头605发生磨损后依然可以紧贴炭碗0011内壁清理,使清理效果不受磨损的影响。
49.炭碗和螺旋槽清理工具采用气动式动力输出,清扫电机
ⅰ‑
601为气动马达,炭碗清理刀头605驱动由气动马达通过减速机实现。
50.本实用新型根据炭块001结构特征,对清扫部
ⅰ‑
601进行特殊设计,对炭碗和和螺旋槽同步清理,做到一次完成,无须多次多通道的往复运动,从而节省了清理时间。
51.作为本实施例优选的实施方式,清扫部
ⅱ‑
701包括安装在安装架500上的清扫电机
ⅱ‑
701、设置在安装架500的左侧面的行星箱702、行星箱702内设有一个主动齿轮703和若干个与主动齿轮703相啮合的从动齿轮704,清扫电机
ⅱ‑
701的动力输出轴ⅱ从行星箱702顶部伸入行星箱702并与主动齿轮703连接,以驱动主动齿轮703转动,进而使从动齿轮704随主动齿轮703转动,行星箱702包括行星箱上壳和行星箱下壳,主动齿轮703和从动齿轮704设置在行星箱上壳和行星箱下壳构成的腔室内。
52.如图8所示,本实施例中的从动齿轮704为五个,五个从动齿轮704沿着主动齿轮703周向均匀分布,五个从动齿轮704的转轴皆穿过齿轮箱702底部与相应的五个转盘705对应连接,以驱动转盘705转动。
53.转盘705上固定连接有安装板
ⅱ‑
706,优选的,如图9所示,转盘705与安装板
ⅱ‑
706为一体结构,安装板
ⅱ‑
706为正方形结构,安装板
ⅱ‑
706的四周靠近其边缘位置开设4个安装槽,4个安装槽中的相邻的2个安装槽相互垂直,安装槽开设有装配孔ⅰ,外立面清理刀头707上开设有装配孔ⅱ,外立面清理刀头707通过锁紧螺栓固定连接在安装板
ⅱ‑
706上的相应安装槽内。
54.作为本实施例优选的实施方案,行星箱702顶部与转轴相应位置开设有容纳转轴的容纳孔,转轴远离转盘705的一端从容纳孔出伸出行星702;从动齿轮的转轴可相对容纳孔伸缩活动,以使立面清理刀头具有上下位置的柔性动作。容纳孔处设有用于检测相应转轴浮动位置的刀头位置检测器900,进而通过转轴浮动位置判断相应外立面清理刀头707浮动位置。本实施例中的刀头位置检测器900为三个,三个刀头位置检测器900间隔设置在相应的容纳孔处。
55.本实施例中的外立面清理刀头707采用悬浮式设计,优选的,每个从动齿轮704上的转轴上皆连接有弹簧ⅱ,弹簧ⅱ可以压紧外立面清理刀头707使其与炭块001外立面始终保持紧密接触(转轴上套设有转轴套,转轴套与转轴键连接且转轴可相对转轴套在一定范围内上下活动,转轴上还套设有弹簧ⅱ,弹簧ⅱ可以压紧外立面清理刀头使其与炭块外立面始终保持紧密接触),每组外立面清理刀头707具有在一定范围内上下浮动的柔性动作,清理作业时,外立面清理刀头707根据渣子的分布情况和清理动力,浮动进行清理,直至清理彻底。
56.刀头位置检测器900的信号输出连接控制器的信号输入,控制器接收刀头位置检测器900上传的检测数据,对数据进行分析处理,并根据分析结果调控六轴机器人400对外立面清理刀头707压力的控制,使清理效果和清理效率实现兼顾。
57.清扫部
ⅱ‑
701的结构设计,六轴机器人400带动清扫部
ⅱ‑
701绕炭块001一周运动即完成炭块001外立面的清理作业,无须多次多通道的往复运动,从而节省了清理时间。
58.作为本实施例优选的实施方案,如图10所示,清扫部
ⅲ‑
800包括与炭块001上的凸台相适配的呈锥体结构的打磨轮802和驱动打磨轮802转动的清扫电机
ⅲ‑
801,打磨轮802的两侧分别与u型结构的打磨轮安装架803的两侧框架转动连接,打磨轮安装架803通过弹簧垫块804固定安装在连接座500的前侧面上。具体的,清扫电机
ⅲ‑
801安装在打磨轮安装架803的框架上,清扫电机
ⅲ‑
801的动力输出轴ⅲ与打磨轮802上的主动转杆连接,打磨轮802上的从动转杆与打磨轮安装架803上的框架转动连接。
59.打磨轮802与炭块001上的凸台0015结构适配,六轴机器人400只需要一次绕凸台0015一周运动,即可完成,大大节约了清理时间,提高了清理效率和清理质量。
60.打磨轮802采用涂层刀具材料,硬质合金或高速钢刀具通过化学或物理方法在其表面涂覆一层耐磨性好的难熔金属化合物,即能提高刀具材料的耐磨性,而又不降低其韧性。
61.本实施例采用3d机器视觉相机300进行视觉测量和定位,采用六轴工业机器人为运动执行机构,由控制器采用plc作集中控制,设计充分考虑系统工作节拍、工作效率,具有可靠性高、动作速度快、柔性强的优点。
62.工作原理:炭块输送机构100将需要清理的炭块001送至指定位置(炭块清理工位),当炭块位置检测器检测到炭块001移动到炭块清理工位处时,控制器启动炭块顶升定位机构200,炭块顶升定位机构200将炭块001顶升一定高度并固定,炭块顶升定位机构200的结构设计,同时具有定限位功能,用于清理时对炭块的位置进行固定。
63.炭块001由炭块顶升定位机构200顶升到位后,控制器控制3d机器视觉相机300启动拍照,照片经由计算后得出炭碗中心距坐标、炭碗螺旋槽坐标、炭块上凸台坐标、炭块外立面坐标等位置数据,3d机器视觉相机300计算出的各清理点的位置数据后传给控制炭碗
清理机构的控制器(机器人控制系统),控制器操控机器人根据坐标值启动相应的清扫部对炭碗0011及螺旋槽、炭块上面0014及凸台0015、外立面0013等进行清理作业。炭块清理机构对炭块001各清理面清理完毕后,炭块顶升定位机构200复位,炭块001下降回到输送辊102上,控制器控制炭块输送机构100动作,将炭块001输送至下一个工作站。
64.以上所述仅为本实用新型的较佳实施例而已,并不用以限制本实用新型,凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。