1.本发明涉及立体车库技术领域,尤其是一种地下立体车库停车系统及停车方法。
背景技术:
2.现有技术中,机械式立体车库,占用空间小,管理方便,停车和取车的效率与平面式车库相比提高了城市空间利用率,包括升降纵移式等机械垂直升降式立体车库已融入自动控制技术。但现有的立体车库及相应的停车方式仍然存在单个停车库车位容量、单次取车时间过长、取车出入口堵塞等问题。同时还需要地上建造高层建筑物,造成对植被和居民采光的影响。
技术实现要素:
3.针对现有技术的不足,本发明提供一种地下立体车库停车系统及停车方法,以解决现有机械停车库车位容量有限及存取车效率低的技术问题。
4.本发明采用的技术方案如下:
5.一种地下立体车库停车系统,包括竖直停车区和水平停车区;
6.所述竖直停车区由多个停车层和校正层沿竖直方向搭建而成;
7.所述停车层包括相邻设置的升降车位和停车车位,所述校正层包括可旋转的校正车位,其用于与位于竖直停车区顶部的车库出入口、或水平停车区对接,所述校正车位和所述升降车位沿竖直方向形成竖直穿梭通道;
8.所述水平停车区包括至少一个单元层,所述单元层包括相邻设置的水平穿梭通道和水平停车台,所述水平停车台上沿长度方向设置多个停车车位;
9.每个所述停车车位上均设有载车板;
10.还包括穿梭机,所述穿梭机可沿竖直穿梭通道以及水平穿梭通道移动,穿梭机上沿竖直方向设有上、下两个用于搭载载车板的搭载位,载车板可在两个搭载位之间移动;
11.所述穿梭机能驱动其上搭载的载车板与停车车位上的载车板水平移动以交换位置。
12.其进一步技术方案为:
13.所述穿梭机呈矩形,沿其长度方向两侧对称设有滑动支座,所述滑动支座可沿穿梭机长度方向同步移动;
14.所述滑动支座上沿高度方向设有两组轨道,分别构成上、下搭载位;每组轨道上侧均设有一传动链条,所述传动链条通过沿轨道长度方向均布的链轮张紧,每个链轮同轴连接一齿轮;
15.位于所述传动链条两端的齿轮还连接在移动座上,所述移动座由驱动装置驱动沿穿梭机宽度方向来回移动;
16.所述载车板呈矩形,沿其长度方向两侧设有与所述齿轮啮合传动的齿条和与所述轨道配合的滚轮件。
17.所述穿梭机上还设有驱动所述载车板在上、下搭载位之间升降的顶升机构。
18.所述穿梭机沿宽度方向的两侧、沿长度方向的两侧分别设有车轮,所述车轮为主动轮。
19.所述水平停车区包括纵向停车区和与其垂直设置的横向停车区,纵向停车区与横向停车区的结构相同。
20.所述停车层包括一个升降车位和两个停车车位,所述升降车位位于中部,所述停车车位等位于所述升降车位的两侧。
21.所述水平停车区包括至少两个上下排布的单元层,每个单元层与所述竖直停车区分别通过校正层对接;所述单元层包括两个所述水平停车台,所述水平穿梭通道形成于两个所述水平停车台之间;位于底部单元层的下方设有一层消防通道。
22.一种地下立体车库停车方法,包括两种停车方式,分别为:
23.1)将车辆停放至竖直停车区:
24.车辆从车库出入口驶入顶部校正层的校正车位,首先驱动穿梭机及其上负载车辆的载车板旋转以调整车头位置,然后穿梭机沿竖直穿梭通道运动至有空停车车位的停车层的升降车位上;
25.穿梭机调整其上负载车辆的载车板上升至上部搭载位,然后驱动空停车车位上的载车板平移至穿梭机的下部搭载位,再驱动负载车辆的载车板移动至空停车车位,完成存车;
26.2)将车辆停放至水平停车区:
27.车辆从车库出入口驶入顶部校正层的校正车位,首先驱动穿梭机及其上负载车辆的载车板旋转以调整车头位置,然后穿梭机沿竖直穿梭通道运动至与水平停车区对接的校正层的校正车位,再根据水平停车区的方向调整车头方向;
28.穿梭机沿水平穿梭通道运动至空停车车位旁,穿梭机调整其上负载车辆的载车板上升至上部搭载位,然后驱动空停车车位上的载车板平移至穿梭机的下部搭载位,再驱动负载车辆的载车板移动至空停车车位,完成存车;
29.存车完成后,穿梭机搭载空载车板返回顶部校正层的校正车位。
30.本发明的有益效果如下:
31.借助城市老城区居民楼间隙及过道等地下空间,深井与隧道联通交互设置结构,充分利用了地下的竖直空间和水平空间,解决了城市老旧城区地上空间有限,停车设施改造难度大的问题。
32.通过穿梭机实现负载载车板和空载车板的同步换板,与现有的先存放车辆,再到另一个空车位取载车板的停车方法相比,节省了存取车时间,极大地提高了系统运行效率。
附图说明
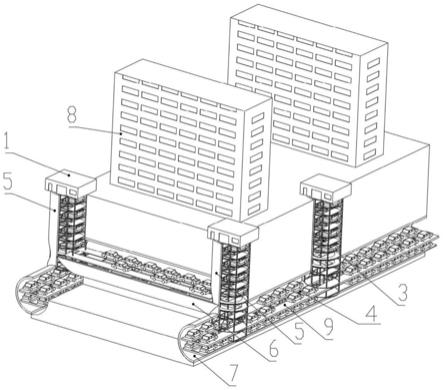
33.图1为本发明实施例的立体结构示意图。
34.图2为图1的右视图。
35.图3为图1的局部结构示意图。
36.图4为本发明实施例的水平停车区的截面示意图。
37.图5为本发明实施例的竖直停车区的截面示意图。
38.图6为本发明实施例的穿梭机的结构示意图。
39.图7为本发明实施例的滑动支座打开状态时载车板处于下降位置的结构示意图。
40.图8为本发明实施例的滑动支座打开状态的载车板处于上升位置的结构示意图。
41.图9为本发明实施例的载车板处于上搭载位的结构示意图。
42.图10为本发明实施例的载车板的局部结构示意图。
43.图11为本发明实施例的双向电缸安装结构示意图。
44.图12为本发明实施例的穿梭机驱动载车板换板初始状态示意图。
45.图13为本发明实施例的穿梭机驱动载车板换板中间状态示意图。
46.图14为本发明实施例的穿梭机驱动载车板换板结束状态示意图。
47.图15为本发明实施例的换板结束后穿梭机返回后的停车层状态示意图。
48.图中:1、车库出入口;2、校正层;3、竖直穿梭通道;301、竖直导轨;4、水平穿梭通道;5、深井;6、纵向隧道;7、横向隧道;701、上单元层;702、下单元层;8、楼宇;9、水平停车台;10、升降车位;11、停车车位;
49.201、穿梭机;202、载车板;203、双向电缸;204、电机二;205、主动轮一;206、主动轮二;
50.2011、输出主轴;2012、减速器;2013、下轨道;2014、上轨道;2015、传动链条;2016、滑动支座;2017、升降电缸;2018、齿轮;2019、电机一;2021、垂直导轮;2022、水平导轮;2023、齿条;2031、移动座;2033、链轮。
具体实施方式
51.以下结合附图说明本发明的具体实施方式。
52.如图1和图2所示,本实施例的地下立体车库停车系统,包括竖直停车区和水平停车区;
53.具体的,借助于小区居民楼的道路或楼宇8间空地,就近建造直径为8-18米的多个深井5,深度可根据停车数量需要确定。在深井5底部或中间位置采用水平隧道将各深井间贯通。水平隧道一般呈横向和纵向分布,亦可视场地为其他角度分布;隧道相互之间可在同一深度平面,亦可在不同深度平面。
54.竖直停车区和水平停车区分别设置在深井5和水平隧道内。
55.如图3所示,水平隧道包括纵向隧道6和与其垂直的横向隧道7,纵向隧道6和横向隧道7最佳直径为9米,内部分别对应设置纵向停车区和与其垂直设置的横向停车区,纵向停车区与横向停车区的结构相同。
56.如图3所示,竖直停车区由多个停车层和校正层2沿竖直方向搭建而成,停车层包括升降车位和停车车位;校正层2包括可旋转的校正车位,其用于与位于竖直停车区顶部的车库出入口1、或水平停车区对接;校正车位和升降车位沿竖直方向形成竖直穿梭通道3;
57.具体的,竖直穿梭通道3内设有竖直导轨301。
58.具体的,如图5所示,每个停车层包括一个升降车位10和两个停车车位11,升降车位10位于中部,两侧为停车车位11,且停车车位11位于车辆长度方向的两侧。中间升降车位10沿竖直方向依次贯穿整个深井5。
59.具体的,深井5最佳直径为9米。当深井直径变化时,每层位置也可为更多停车位
置。
60.如图4所示,以横向停车区为例,横向隧道内设置至少两个上下排布的单元层,分别为上单元层701、下单元层702;
61.如图3所示,每个单元层与竖直停车区分别通过校正层2对接;单元层包括两个水平停车台9,水平穿梭通道4形成于两个水平停车台9之间;
62.具体的,位于底部单元层的下方设有一层消防通道。
63.竖直停车区和水平停车区内的每个停车车位上均设有载车板202。载车板202用于承载车辆。
64.还包括穿梭机201,其在竖直穿梭通道3以及水平穿梭通道4移动;
65.穿梭机201上沿竖直方向设有上、下两个用于搭载载车板202的搭载位,载车板202可在两个搭载位之间移动换位;
66.穿梭机能驱动其上搭载的载车板与停车车位上的载车板水平移动,以交换位置。即穿梭机位于升降车位时,可使升降车位与停车车位上的载车板交换,从而将负载车辆的载车板移动至停车车位,同时将停车车位上的空载车板移动至升降车位的穿梭机上。同理,能驱动载车板在水平穿梭通道与水平停车台的停车车位之间水平移动以交换位置。
67.如图6和图7所示,穿梭机201呈矩形,沿其长度方向两侧对称设有滑动支座2016,滑动支座2016可沿穿梭机201长度方向移动;滑动支座2016上沿高度方向设有两组轨道,分别构成上、下搭载位;每组轨道上侧均设有一传动链条2015,传动链条2015通过沿轨道长度方向均布的链轮2033张紧,每个链轮2033同轴连接一齿轮2018;
68.载车板202呈矩形,沿其长度方向两侧设有与齿轮2018啮合传动的齿条2023和与轨道配合的滚轮件。
69.穿梭机201上还设有驱动载车板202在上、下搭载位之间升降的顶升机构。
70.具体的,两组轨道包括上轨道2014、下轨道2013。两侧的滑动支座2016通过丝杆滑块传动机构与减速器2012及其输出主轴2011连接,在减速器2012驱动下同步相向运动成收回状态或反向运动成打开状态。
71.具体的,输出主轴2011两端分别通过轴承座与穿梭机201车体两侧的滑动支座2016活接,输出主轴2011正反向旋转可以实现滑动支座2016的同步打开与关闭。
72.具体的,顶升机构包括升降电缸2017,其设置在穿梭机201内侧四角处,升降电缸2017伸缩端上下伸缩可实现载车板202升降,如图7和图8所示,分别为滑动支座2016打开状态下,载车板202在下部、上部搭载位的状态。如图9所示,为滑动支座2016收回状态下,载车板202在上部搭载位即载车板202由上轨道2014支撑。当载车板202被送达到下轨道2013时,载车板与升降电缸2017支撑形成对应关系,滑动支座2016打开,升降电缸2017向上顶住载车板202升起,并到达上轨道2014位置,随即减速器2012带动滑动支座2016关闭,将载车板限位到上轨道2014内,实现载车板202在上下轨道间的位置交换移动。
73.具体的,与轨道配合的滚轮件包括如图10所示的垂直导轮2021和水平导轮2022,导轮均为无动力导轮。其中垂直导轮2021用于与轨道底面配合,水平导轮2022用于与轨道的侧面配合。垂直导轮2021和水平导轮2022活卡在轨道内并通过轨道上下、左右侧进行限位。
74.具体的,如图7所示,齿条2023设置在滚轮件上侧,当导轮定位在轨道内时,齿条
2023恰与穿梭机上的齿轮2018啮合,通过齿轮组转动,带动载车板202移动。
75.如图11所示,位于传动链条2015两端的齿轮2018还连接在移动座2031上,移动座2031由驱动装置驱动沿穿梭机201宽度方向来回移动。
76.具体的,移动座2031由双向电缸203驱动,当双向电缸203向左右移动时,设置于移动座2031上的齿轮2018也同步左右滑动,借助于柔性传动链条2015的补偿作用,实现两端齿轮2018的左右移动,同时齿轮2018亦可在链条的带动下同步独立转动,驱动位于穿梭机201两侧的载车板202在停车车位和穿梭机间交换位置,即完成存取车换板功能。
77.具体的,其中一个链轮2033在电机一2019驱动下通过传动链条2015将动力传输给其余链轮2033再通过连接轴传输给各齿轮2018。在传动链条2015的串联下所有齿轮2018均可同步转动。
78.具体的,双向电缸203可控制其两端的独立齿轮2018移动。当穿梭机在移动过程中,双向电缸203控制两端移动座2031收回,对应的两端的齿轮2018处于收回状态,不会影响穿梭机移动。
79.具体的,齿轮2018沿着轨道长度方向均布设置,间距为300-500mm。
80.如图12至图15所示,为存车过程中穿梭机及相应载车板的运动状态示意图。
81.如图12所示,穿梭机201通过载车板202将车辆移动至某一停车层的升降车位10中,并准备将车辆移动至右侧的停车车位11中。此时穿梭机202将其上搭载车辆的载车板202抬升至上轨道位置,双向电缸驱动右侧移动座向右,右端的齿轮与右侧停车车位11上的空载车板202上的齿条啮合传动,将右侧载车板202拖动至穿梭机201下轨道中,同时穿梭机201上原负载车辆的载车板202沿上轨道向右移动至停车车位11,两个板移动换位中间状态如图13所示,穿梭机负载车辆的载车板在上轨道位置,停车车位的空载状态载车板在下轨道位置,两者之间具有一定的安全距离,不会对换板造成影响。
82.位置交换完成状态如图14所示,此时负载车辆的载车板202位于停车车位上,原位于右侧停车车位11上的空载车板202位于升降车位的穿梭机201上,存车完毕后,穿梭机201载着空载车板202沿竖直穿梭通道运动离开该停车层的升降车位,如图15所示。
83.具体的,每个停车车位上设有与载车板侧边相配合的导轨。
84.如图7所示,穿梭机201沿宽度方向的两侧、沿长度方向的两侧分别设有车轮,车轮为主动轮。具体包括位于沿宽度方向两侧均布的主动轮一205、以及位于沿长度方向两侧均布的主动轮二206,主动轮一205由电机二204提供动力,主动轮二206的动力装置图中未示出。
85.本实施例的穿梭机通过主动轮沿水平穿梭通道运动或竖直穿梭通道运动。此外,本领域技术人员可以理解,穿梭机沿竖直穿梭通道运动也可利用类似电梯提升装置等驱动机构提供动力。
86.本实施例的穿梭机位于校正层2的校正车位时,可以绕深井轴心做360度旋转,实现不同方向驶入的车辆进行车头方向和位置校正。校正层2设置在深井首层和与水平隧道的对接层,完成出入口、横纵向停车隧道间的交互对接。
87.本实施例的地下立体车库停车方法,包括两种停车方式,分别为:
88.1)将车辆停放至竖直停车区:车辆从车库出入口1驶入顶部校正层2的校正车位,首先驱动穿梭机201及其上负载车辆的载车板202旋转以调整车头位置,然后穿梭机201沿
竖直穿梭通道3运动至有空停车车位的停车层的升降车位上;
89.穿梭机201调整其上负载车辆的载车板202上升至上部搭载位,然后驱动空停车车位上的载车板202平移至穿梭机201的下部搭载位,再驱动负载车辆的载车板202移动至空停车车位,完成存车;
90.2)将车辆停放至水平停车区:
91.车辆从车库出入口1驶入顶部校正层2的校正车位,首先驱动穿梭机201及其上负载车辆的载车板202旋转以调整车头位置,然后穿梭机201沿竖直穿梭通道3运动至与水平停车区对接的校正层2的校正车位,再根据水平停车区的方向调整车头方向;
92.穿梭机201沿水平穿梭通道4运动至空停车车位旁,穿梭机201调整其上负载车辆的载车板202上升至上部搭载位,然后驱动空停车车位上的载车板202平移至穿梭机201的下部搭载位,再驱动负载车辆的载车板202移动至空停车车位,完成存车;
93.存车完成后,穿梭机201搭载空载车板202返回顶部校正层2的校正车位,迎接后续入库车辆,重复上述流程。
94.具体的,将车辆停放至水平停车区,包括停放至横向隧道7内的横向停车区和停放至纵向隧道6的纵向停车区。穿梭机201沿竖直穿梭通道3运动至与水平停车区对接的校正层2的校正车位,再根据水平停车区的方向调整车头方向,如图3所示,当需要停至横向停车区时,由于横向停车区的长度方向与车辆长度方向一致,因此无需调整车头方向,穿梭机直接沿水平穿梭通道4移动;当需要停至纵向停车区时,由于纵向停车区的长度方向与车辆长度方向垂直,因此需要通过校正层的校正车位旋转90
°
调整车头位置,使车长度方向与纵向停车区的长度方向一致,然后穿梭机再沿纵向停车区的水平穿梭通道4移动。
95.取车流程与存车流程的原理相同、流程相逆。
96.通过本技术的穿梭机实现负载载车板和空载车板的同步换板,节约时间,穿梭机和停车位随时处于准备状态。较现有先存放车辆,再到另一个空车位取载车板的技术节省存取车时间50%,极大的提高了运行效率。
97.车辆停放到竖直停车区出入口后,交由停车系统全自动停放车辆,车辆在载车板的驱动下完成存取,省时省力,避免了行人与车在同一场内直接交互,安全系数高;降低了对司乘人员开车技术的要求,避免了车辆间剐蹭等事故,车辆停放后不再受到暴晒、雨淋等自然环境的影响。停车系统可使车辆按照预定路线标准停放,充分利用车位资源。还可通过控制系统预约就近取车,在入口位置设置预约取车区,提前将预约车辆取出,实现快速存取。
98.本技术的地下空间立体停车系统深井出入口数量、隧道停车长度、数量均可灵活布局,不影响原有建筑和地面景观植被,解决老旧居民区停车难的问题。本技术的技术方案亦适用于核心商务区、车站、机场、地铁口等空间狭窄区域。