1.本实用新型涉及一种打磨工站,特别涉及一种用于桥壳自动化生产线的打磨工站。
背景技术:
2.桥壳广泛应用于各式货车中,是不可或缺的重要零件;目前桥壳打磨工站虽有机器人打磨,可上下料环节依然由人工完成,不适合大规模大批量生产;而且桥壳打磨位置有局限性,有些死角位置无法加工;还有,桥壳的打磨环境粉尘多、噪音大、并充斥着有害气体,工人长期在此环境下工作,对健康有伤害。
3.因此,有必要做进一步改进。
技术实现要素:
4.本实用新型的目的旨在提供一种结构简单、生产效率高、安全可靠、自动化程度高、打磨无死角、实用性强的用于桥壳自动化生产线的打磨工站,以克服现有技术中的不足之处。
5.按此目的设计的一种用于桥壳自动化生产线的打磨工站,包括机器人,其特征在于:还包括防尘间、打磨工作台、顶升机构、变位机和换刀台,机器人、打磨工作台、顶升机构、变位机和换刀台均设置在防尘间内,机器人活动设置于打磨工作台的一侧,以对桥壳进行打磨,顶升机构上下活动设置在打磨工作台内,以对桥壳进行定位,变位机活动设置于打磨工作台的两端,以对桥壳进行夹紧或松开,变位机上设有翻转部件,变位机夹紧桥壳后通过翻转部件翻转桥壳,机器人活动设置在换刀台的一侧,以通过换刀台进行换刀。
6.所述变位机包括动力座和从动座,动力座上设有所述的翻转部件,翻转部件包括第一驱动电机和第一夹爪,第一驱动电机与第一夹爪驱动连接,从动座上设有第二夹爪和转轴,第二夹爪通过转轴与从动座转动连接,桥壳打磨时,第一夹爪夹紧桥壳的一端,第二夹爪夹紧桥壳的另一端,第一驱动电机通过第一夹爪带动桥壳翻转。
7.所述打磨工作台的两端设有导轨,动力座和从动座的底部均设置有滑块,滑块滑动设置于导轨上,动力座和从动座通过滑块与导轨的配合分别滑动设置在打磨工作台的两端。
8.所述顶升机构包括第二驱动电机、传动升降部件和顶升台,第二驱动电机与传动升降部件传动连接,顶升台连接在传动升降部件的顶部,桥壳打磨时,顶升台向上升,以对桥壳进行定位,桥壳定位完成后,顶升台复位下降。
9.所述防尘间包括相互连接的底板和外壳,打磨工作台、机器人和换刀台设置在底板上,外壳罩设于打磨工作台、机器人和换刀台的外周,外壳的前侧和顶侧均设有相互连通的开口,外壳的前侧活动设置有用于开闭开口的升降门,外壳的顶侧活动设置有用于开闭开口的推拉门;打磨工站还包括自动桁架,桥壳打磨时,自动桁架抓取桥壳并通过外壳的前侧和顶侧的开口将桥壳放入防尘间内。
10.所述机器人的前端设置有电主轴安装组件,电主轴安装组件的端部设置有用于打磨桥壳的磨刀组件。
11.所述换刀台包括底座和刀盒,底座设置于底板上,刀盒滑动设置在底座上,刀盒的顶部设置有可翻转的顶盖,刀盒内设置有若干固定位,固定位上固定设置有若干用于更换的磨刀组件。
12.所述刀盒的底部设置有滑轨组件和气缸组件,气缸组件与刀盒驱动连接,滑轨组件设置于刀盒与底座之间,刀盒通过滑轨组件滑动设置于底座上。
13.所述外壳的一侧设有开口,防尘间的外侧设置有防护栏,防护栏和换刀台分别设置在开口的两侧,刀盒内的磨刀组件更换时,刀盒通过开口滑出防尘间外、并滑动至防护栏内。
14.所述防尘间的后侧设置有电控柜和机器人控制柜,电控柜分别与第一驱动电机、第二驱动电机电连接,机器人控制柜与机器人电连接。
15.本实用新型的打磨工站采用abb机器人连接电主轴进行打磨工作,由自动桁架抓取桥壳从工站顶部放入工站内部,工站内部由顶升台与变位机配合对桥壳进行定位抓取,机器人进行打磨操作的同时,变位机也可相应翻转桥壳方向,达到打磨死角位置的目的,可突破已有打磨工站功能局限性,而且打磨工作全程无需人工参与,大大节省人力,生产安全大大提高,实现整线生产自动化,同时避免人员直接接触恶劣环境;本打磨工站还可提高工作稳定性,并排除潜在的安全隐患,该打磨工站已经用于东风德纳十堰工厂桥壳打磨工艺中。
附图说明
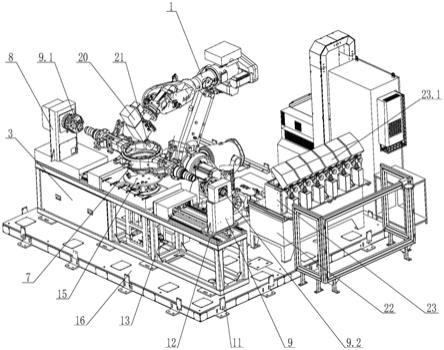
16.图1为本实用新型一实施例中打磨工站的整体结构示意图。
17.图2为本实用新型一实施例中打磨工站另一方位的整体结构示意图。
18.图3为本实用新型一实施例中除去防尘间后打磨工站的整体结构示意图。
19.图4为本实用新型一实施例中除去防尘间后打磨工站另一方位的整体结构示意图。
20.图5为本实用新型一实施例中除去防尘间后打磨工站的正视图。
21.图6为本实用新型一实施例中除去电机护罩和第一夹爪后动力座的整体结构示意图。
具体实施方式
22.下面结合附图及实施例对本实用新型作进一步描述。
23.参见图1-图6,本用于桥壳自动化生产线的打磨工站,包括机器人1、防尘间2、打磨工作台3、顶升机构4、变位机5和换刀台6,机器人1、打磨工作台3、顶升机构4、变位机5和换刀台6均设置在防尘间2内,机器人1活动设置于打磨工作台3的一侧,以对桥壳7进行打磨,顶升机构4上下活动设置在打磨工作台3内,以对桥壳7进行定位,变位机5活动设置于打磨工作台3的两端,以对桥壳7进行夹紧或松开,变位机5上设有翻转部件,变位机5夹紧桥壳7后通过翻转部件翻转桥壳7,机器人1活动设置在换刀台6的一侧,以通过换刀台6进行换刀。
24.变位机5包括动力座8和从动座9,动力座8上设有翻转部件,翻转部件包括第一驱
动电机10和第一夹爪8.1,第一驱动电机10与第一夹爪8.1驱动连接,从动座9上设有第二夹爪9.1和转轴9.2,第二夹爪9.1通过转轴9.2与从动座9转动连接,桥壳7打磨时,第一夹爪8.1夹紧桥壳7的一端,第二夹爪9.1夹紧桥壳7的另一端,第一驱动电机10通过第一夹爪8.1带动桥壳7翻转,这样可对桥壳7全方位进行打磨,解决桥壳7死角位置无法打磨的难点。
25.打磨工作台3的顶部两端设有导轨11,动力座8和从动座9的底部均设置有滑块12,滑块12滑动设置于导轨11上,动力座8和从动座9通过滑块12与导轨11的配合分别滑动设置在打磨工作台3的两端,以对桥壳7进行夹紧或松开,同时可适应不同尺寸的桥壳7。动力座8和从动座9内均设有移动减速机,移动减速机通过其齿轮与打磨工作台3上的滑动导向杆配合进行移动,从而带动动力座8和从动座9在导轨11上滑动。
26.顶升机构4包括第二驱动电机13、传动升降部件14和顶升台15,第二驱动电机13设置于打磨工作台3的底部,第二驱动电机13与传动升降部件14传动连接,顶升台15连接在传动升降部件14的顶部,桥壳7打磨时,顶升台15向上升,以对桥壳7进行定位(具体地,顶升台15上设有定位块,定位块可将桥壳7卡住,从而对桥壳7定位),桥壳7定位完成后,顶升台15复位下降。其中,传动升降部件14可以是齿轮、升降杆组件和传动杆的组合,升降杆组件的底部设有传动螺母,升降杆组件与顶升台15连接,第二驱动电机13与齿轮连接,齿轮与传动杆连接,传动螺母套在传动杆上,第二驱动电机13工作时带动齿轮转动,齿轮带动传动杆转动,从而使传动螺母在传动杆上作直线运动,带动升降杆组件升降,从而实现顶升台15的升降。
27.防尘间2包括相互连接的底板16和外壳17,打磨工作台3、机器人1和换刀台6设置在底板16上,外壳17罩设于打磨工作台3、机器人1和换刀台6的外周,外壳17的前侧和顶侧均设有相互连通的开口,外壳17的前侧活动设置有用于开闭开口的升降门18,外壳的顶侧活动设置有用于开闭开口的推拉门19,升降门18连接设置在外壳17前侧的气缸,推拉门19连接设置在外壳17顶侧的气缸,通过气缸的伸缩移动升降门18和推拉门19;打磨工站还包括自动桁架,自动桁架设置在防尘间2的外部,桥壳7打磨时,自动桁架抓取桥壳7并通过外壳17的前侧和顶侧的开口将桥壳7放入防尘间2内的打磨工作台3上方,这样无需人工上下料,在一定程度上节省生产成本,而且实现打磨工站接入自动化生产线,提高生产效率;桥壳7打磨时,升降门18和推拉门19均关闭,使得打磨工站内的粉尘、噪音和有害气体与外界环境隔绝,从而避免人员直接接触恶劣环境。
28.机器人1的前端设置有电主轴安装组件20,电主轴安装组件20的端部设置有用于打磨桥壳7的磨刀组件21;机器人1为abb机器人,通过电主轴安装组件20控制磨刀组件21,从而实现桥壳7的精准打磨。
29.换刀台6包括底座22和刀盒23,底座22设置于底板16上,刀盒23滑动设置在底座22上,刀盒23的顶部设置有可翻转的顶盖23.1,刀盒23内设置有若干固定位24,固定位24上固定设置有若干用于更换的磨刀组件21,若机器人1上的磨刀组件21出现磨损时,机器人1可自动通过刀盒23更换磨损的磨刀组件21,而且,刀盒23内的各磨刀组件21用途不一样,机器人1可根据实际打磨的需要自动更换合适的磨刀组件21,从而满足不同的工艺要求。
30.刀盒23的底部设置有滑轨组件25和气缸组件26,气缸组件26与刀盒23驱动连接,滑轨组件25设置于刀盒23与底座22之间,刀盒23通过滑轨组件25滑动设置于底座22上;外壳17的一侧设有开口,防尘间2的外侧设置有防护栏27,防护栏27和换刀台6分别设置在开
口的两侧,刀盒23内的磨刀组件21更换时,气缸组件26驱动刀盒23通过开口滑出防尘间2外、并滑动至防护栏27内,然后通过人工更换刀盒23内磨损的磨刀组件21;防护栏27可防止人员站在刀盒23换刀的位置,避免刀盒23滑出至换刀的位置时对人员造成伤害。
31.防尘间2的后侧设置有电控柜28和机器人控制柜29,电控柜28分别与第一驱动电机10、第二驱动电机13和其它电力部件电连接,机器人控制柜29与机器人1电连接。
32.打磨工站的工作流程:
33.自动桁架抓取桥壳7并通过外壳17的前侧和顶侧的开口将桥壳7放入防尘间2内的打磨工作台3上方,然后顶升台15上升对桥壳7进行定位,再由动力座8和从动座9的夹爪分别将桥壳7的两端夹紧,顶升台15下降复位,然后由机器人1对桥壳7进行打磨,打磨过程中变位机5的翻转部件对桥壳7进行翻转,针对不同的工艺要求,机器人1通过换刀台6进行换刀,桥壳7打磨完成后,自动桁架抓取桥壳7并将桥壳7移离防尘间2。
34.上述为本实用新型的优选方案,显示和描述了本实用新型的基本原理、主要特征和本实用新型的优点。本领域的技术人员应该了解本实用新型不受上述实施例的限制,上述实施例和说明书中描述的只是说明本实用新型的原理,在不脱离本实用新型精神和范围的前提下本实用新型还会有各种变化和改进,这些变化和改进都落入要求保护的本实用新型范围内。本实用新型要求保护范围由所附的权利要求书及其等同物界定。