1.本实用新型涉及数控车床自动送料技术领域,具体为一种无心数控车床自动送料装置。
背景技术:
2.数控车床是一种装有程序控制系统的自动化机床,能够根据已编好的程序,使机床动作并加工零件,数控机床综合了机械、自动化、计算机、微电子等技术,解决了复杂、精密、小批量零件的加工问题,是一种柔性的、高效能的自动化机床,为了提高数控车床的加工效率,通常都会再数控车床上安装送料装置,而现有技术中的送料装置结构单一,不方便带动物料进行转动,同时也不方便对不同位置的物料进行拿取。
技术实现要素:
3.本实用新型的目的在于提供一种无心数控车床自动送料装置,以解决上述背景技术中提出的而现有技术中的送料装置结构单一,不方便带动物料进行转动的问题。
4.为实现上述目的,本实用新型提供如下技术方案:一种无心数控车床自动送料装置,包括底板和车床本体,所述底板的右侧上方安装有车床本体,所述底板的上方中间安装有转动装置;
5.所述转动装置包括箱体、竖杆、第一齿轮、第二齿轮、第一电机和横板;
6.所述箱体的下方与底板固定相连,所述箱体的上下壁通过轴承转动连接在竖杆的底部,竖杆的底部贯穿箱体的上下壁,所述竖杆的下方外壁固接有第一齿轮,第一齿轮套在竖杆的下方外壁,且第一齿轮的右侧啮合连接有第二齿轮,所述第二齿轮的下方固接有第一电机,且第一电机的外壁中间固接有横板,所述第一横板的右侧与箱体右侧内壁固定相连。
7.所述竖杆的前后端上方固接有卡块,所述卡块的外壁套有t形套筒,且t形套筒的内壁分别与竖杆和卡块的外壁间隙配合。
8.所述竖杆的右侧下方安装有调节装置;
9.所述调节装置包括第一t形板、第二电机、第三齿轮、第四齿轮和螺纹杆;
10.所述第一t形板的左侧内部与竖杆的外壁固定相连,所述第一t形板的右侧上方固接有第二电机,且第二电机的输出轴固接有第三齿轮,所述第三齿轮的左侧下方啮合连接有第四齿轮,所述第四齿轮的固接在螺纹杆下端,所述第四齿轮套在螺纹杆下端,且第四齿轮与第三齿轮啮合,所述螺纹杆的上方外壁与t形套筒的右侧内部螺纹相连。
11.所述t形套筒的左侧安装有夹取装置;
12.所述夹取装置包括挡杆、第二t形板、夹板、气缸和第一竖板;
13.所述挡杆的右侧与t形套筒固定相连,所述挡杆的左侧外壁安装有第二t形板,第二t形板的通孔套在第二t形板上,且第二t形板的通孔处内壁与挡杆的外壁间隙配合,所述第二t形板的下方两侧滑槽处分别滑动卡接有夹板,左右所述夹板之间上方固接有气缸,所
述气缸的中部固接有第一竖板,且第一竖板的上方与第二t形板底部固定相连。
14.所述第二t形板的右侧中间固接有电动推杆,所述电动推杆的右侧固接有第二竖板,且第二竖板的上方与挡杆底部固定相连。
15.与现有技术相比,本实用新型的有益效果是:该无心数控车床自动送料装置,通过箱体、竖杆、第一齿轮、第二齿轮、第一电机和横板等结构之间的相互配合,可以通过第一电机带动第二齿轮进行转动,使第二齿轮通过第一齿轮带动竖杆进行转动,第一竖杆通过t形套筒等带动夹板转动,从而方便了带动物料进行移动;
16.通过第一t形板、第二电机、第三齿轮、第四齿轮和螺纹杆等结构之间的相互配合,可以通过第二电机带动第三齿轮进行转动,第三齿轮通过第四齿轮带动螺纹杆进行转动,使螺纹杆带动t形套筒移动,从而对夹板的竖直方向进行调节;
17.通过挡杆、第二t形板、夹板、气缸和第一竖板等结构之间的相互配合,可以通过气缸带动夹板移动,使夹板将物料夹紧,再使电动推杆通过第二t形板等带动夹板移动,从而通过此装置便可以对不同位置的物料进行拿取,进而提高了此装置的使用效果。
附图说明
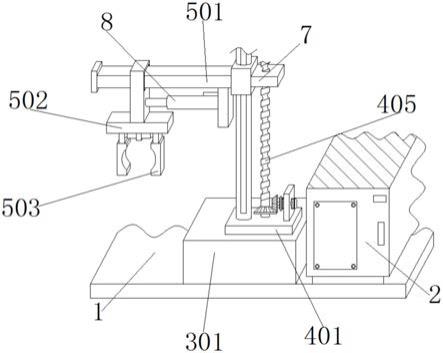
18.图1为本实用新型结构示意图;
19.图2为图1中的主视图;
20.图3为图2中第一齿轮、第一电机和第一t形板处的结构示意图;
21.图4为图2中处电动推杆、第二t形板和夹板的结构示意图。
22.图中:1、底板,2、机床本体,3、转动装置,301、箱体,302、竖杆,303、第一齿轮,304、第二齿轮,305、第一电机,306、横板,4、调节装置,401、第一t形板,402、第二电机,403、第三齿轮,404、第三齿轮,405、螺纹杆,5、夹取装置,501、挡杆,502、第二t形板,503、夹板,504、气缸,505、第一竖板,6、卡块,7、t形套筒,8、电动推杆,9、第二竖板。
具体实施方式
23.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
24.请参阅图1-4,本实用新型提供一种技术方案:一种无心数控车床自动送料装置,包括底板1和车床本体2,底板1的右侧上方安装有车床本体2,底板1的上方中间安装有转动装置3,转动装置3包括箱体301、竖杆302、第一齿轮303、第二齿轮304、第一电机305和横板306,箱体301的下方与底板1固定相连,箱体301的内部通过2个轴承转动连接有竖杆302,竖杆302的下方外壁固接有第一齿轮303,且第一齿轮303的右侧啮合连接有第二齿轮304,第二齿轮304通过第一齿轮303可以带动竖杆302进行转动,第二齿轮304的下方固接有第一电机305,第一电机305的型号为ecma-e11320rs,第一电机305的输出轴可以带动第二齿轮304进行转动,且第一电机305的中间外壁固接有横板306,第一横板306的右侧与箱体301固定相连,竖杆302的前后端上方固接有卡块6,卡块6的外壁安装有t形套筒7,且t形套筒7的内壁分别与竖杆302和卡块6的外壁间隙配合,通过卡块6和竖杆302可以对t形套筒7起限位作
用。
25.竖杆302的右侧下方安装有调节装置4,调节装置4包括第一t形板401、第二电机402、第三齿轮403、第四齿轮404和螺纹杆405,第一t形板401的左侧内部与竖杆302的外壁固定相连,第一t形板401的右侧上方固接有第二电机402,第二电机402的型号与第一电机305的型号相同,且第二电机402的输出轴固接有第三齿轮403,第三齿轮403的左侧下方啮合连接有第四齿轮404,第二电机402的输出轴通过第三齿轮403可以带动第四齿轮404进行转动,第三齿轮403和第四齿轮404为伞形齿轮,第四齿轮404的内部固接有螺纹杆405,第四齿轮404可以带动螺纹杆405进行转动,且螺纹杆405的下方外壁与第一t形板401的内部转动相连,螺纹杆405的上方外壁与t形套筒7的内部螺纹相连,通过螺纹杆405可以带动t形套筒7进行移动。
26.t形套筒7的左侧安装有夹取装置5,夹取装置5包括挡杆501、第二t形板502、夹板503、气缸504和第一竖板505,挡杆501的右侧与t形套筒7固定相连,挡杆501的左侧外壁安装有第二t形板502,第二t形板502的上方内部和下方分别加工有通孔和2个滑槽,且第二t形板502的通孔处内壁与挡杆501的外壁间隙配合,第二t形板502的下方滑槽处滑动卡接有夹板503,夹板503的上方外壁加工有滑块,这样夹板503可以在第二t形板502的滑槽处移动,左右夹板503的内侧上方固接有气缸504,气缸504的型号为sc,通过气缸504可以带动夹板503移动,从而将物料夹紧,气缸504的内侧固接有第一竖板505,且第一竖板505的上方与第二t形板502固定相连,第二t形板502的右侧中间固接有电动推杆8,电动推杆8的型号为xtl,电动推杆8的右侧固接有第二竖板9,且第二竖板9的上方与挡杆501固定相连。
27.在本实施例中,当操作人员需要使用无心数控车床自动送料装置时,首先操作人员接通第二电机402和电动推杆8的外接电源,第二电机402和电动推杆8启动,使第二电机402的输出轴带动第三齿轮403进行转动,第三齿轮403通过第四齿轮404带动螺纹杆405进行转动,通过螺纹杆405带动t形套筒7在竖杆302上进行移动,从而对夹板503的竖直方向高度进行调节。同时电动推杆8带动第二t形板502移动,使第二t形板502带动夹板503移动,从而对夹板503的水平位置进行调节,当夹板503移动至物料处后,接通气缸504的外接电源,启动气缸504,通过气缸504带动夹板503移动,从而通过夹板503将物料夹紧,之后接通第一电机305的外接电源,启动第一电机305,使第一电机305的输出轴带动第二齿轮304进行转动,第二齿轮304通过第一齿轮303带动竖杆302进行转动,使竖杆302通过t形套筒7带动夹板503转动,再配合第二电机402和电动推杆8等便可以将物料移动至机床本体2处,从而达到自动上料的目的。总结上述说明,夹板503可以高度调节,还可以水平360转动。
28.本实用新型仅限保护机械结构部分,通过本实用新型可以实现工作目的:夹板503可以高度调节,还可以水平360转动。。
29.在本实用新型的描述中,需要理解的是,术语“同轴”、“底部”、“一端”、“顶部”、“中部”、“另一端”、“上”、“一侧”、“顶部”、“内”、“前部”、“中央”、“两端”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
30.在本实用新型中,除非另有明确的规定和限定,术语“安装”、“设置”、“连接”、“固定”、“旋接”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;
可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系,除非另有明确的限定,对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本实用新型中的具体含义。
31.尽管已经示出和描述了本实用新型的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本实用新型的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本实用新型的范围由所附权利要求及其等同物限定。