1.本实用新型涉及机械人技术领域,具体涉及一种桁架机器人手爪位置调节机构。
背景技术:
2.机器人手爪普遍应用于工业领域,在零件、产品等制造加工过程中有着重要作用,代替人力进行工作,可减轻人力劳动,有助于实现全自动生产,特别是一些具有一定危险性或者具有较高运送速率场所,都需要运用机器人手爪。其主要从事零件、产品的递送、旋转,故对机器人手爪的组装位置具有较高的要求,传统的机器人手爪普通采用螺钉或者焊接的形式直接与驱动件进行联动,位置无法进行调节,无法满足机器人手爪中心与机床主轴中心精准调节的需求,针对不同的设备必须重新组装特定的机器人手爪,这直接增加厂家的负担,间接的提升零件、产品的制造成本。
技术实现要素:
3.本实用新型所要解决的技术问题在于针对上述现有技术的不足,提供一种桁架机器人手爪位置调节机构,可解决机械手爪不能进行位置调节的问题,实现机器人手爪中心与机床主轴中心精准调节。
4.为实现上述目的,本实用新型提供了如下技术方案:一种桁架机器人手爪位置调节机构,其特征在于,包括桁架,所述桁架端部可拆卸连接有调节块,所述调节块中部可拆卸连接有支撑架,所述调节块位于与支撑架两侧对应处分别设有连接槽,所述支撑架端部设有可与连接槽滑动连接的连接凸条,所述调节块两侧均设有若干组与连接槽导通连接的紧定孔,所述紧定孔中心轴线与连接槽中心轴线相互异面垂直,所述支撑架位于朝向桁架的端部设有螺纹连接孔,所述螺纹连接孔内设有螺杆,所述螺杆两端分别与桁架铰接。
5.采用上述技术方案,可解决机械手爪不能进行位置调节的问题,实现机器人手爪中心与机床主轴中心精准调节,促使机器人手爪可适用于多种类的设备;其中,连接凸条与连接槽配合,可将支撑架与调节块二者进行可滑动的组装联动;在位置调节过程中,率先将紧定孔进行松开,而后转动螺杆,由于螺杆的两端被限位、支撑架不可环绕螺杆作旋转,故支撑架可沿螺杆的中心轴线作移动,从而实现机器人手爪位置的精准调节,满足机器人手爪中心与机床主轴中心精准调节的需求,调节至需要的位置后,利用紧定孔将支撑架与调节块进行相对位置固定即可,操作方便。
6.上述的一种桁架机器人手爪位置调节机构可进一步设置为:所述连接槽包括与支撑架上端面贴合的限位面、与连接凸条抵触连接的第一防脱滑动面,所述第一防脱滑动面与限位面呈锐角且朝向支撑架一侧倾斜设置,所述连接凸条包括与第一防脱滑动面平行设置的第二防脱滑动面。
7.采用上述技术方案,既可实现调节块与支撑架的连接,又可实现支撑架与调节块二者沿连接槽作相对运动,且不易发生卡滞,进一步的,倾斜设置的两组防脱滑动面,相较于弧形的连接槽面,机加工较为方便。
8.上述的一种桁架机器人手爪位置调节机构可进一步设置为:所述连接槽与连接凸条之间设有调节板。
9.采用上述技术方案,调节板主要用以改善支撑架与连接槽之间的间隙问题,主要是由于加工过程中必然存在误差。
10.上述的一种桁架机器人手爪位置调节机构可进一步设置为:所述调节块两端分别可拆卸连接有一组装饰板,所述螺杆一端与一组装饰板抵触连接,另一组装饰板上设有与螺杆间隙配合的通孔。
11.采用上述技术方案,可对调节块、螺杆、支撑架端部以及三者之间的连接结构进行遮蔽,提升机器人手爪的整体美观性,且可保护调节块、螺杆、支撑架端部,防止灰尘进入。
12.上述的一种桁架机器人手爪位置调节机构可进一步设置为:所述螺杆端部设有便于拆卸的调节纹路。
13.采用上述技术方案,有利于虎钳、螺丝刀等工具与螺杆进行联动,方便拆卸,省力。
14.下面结合附图和实施例对本实用新型作进一步详细说明。
附图说明
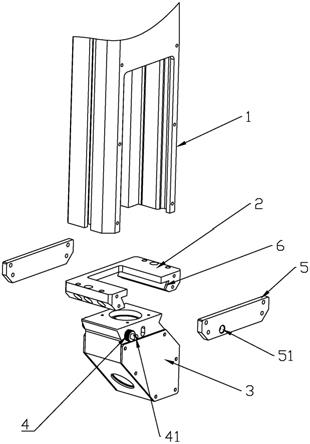
15.图1为本实用新型实施例的爆炸示意图;
16.图2为本实用新型实施例的组装状态示意图;
17.图3为本实用新型实施例中调节块的正视示意图;
18.图4为本实用新型实施例中调节块的右视示意图;
19.图5为本实用新型实施例的支撑架正视示意图。
具体实施方式
20.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
21.如图1至5所示的一种桁架1机器人手爪位置调节机构,包括桁架1,所述桁架1端部可拆卸连接有调节块2,所述调节块2中部可拆卸连接有支撑架3,所述调节块2位于与支撑架3两侧对应处分别设有连接槽21,所述支撑架3端部设有可与连接槽21滑动连接的连接凸条31,所述调节块2两侧均设有三组与连接槽21导通连接的紧定孔22,所述紧定孔22中心轴线与连接槽21中心轴线相互异面垂直,所述支撑架3位于朝向桁架1的端部设有螺纹连接孔32,所述螺纹连接孔32内设有螺杆4,所述螺杆4两端分别与桁架1铰接。所述连接槽21包括与支撑架3上端面贴合的限位面211、与连接凸条31抵触连接的第一防脱滑动面212,所述第一防脱滑动面212与限位面211呈锐角且朝向支撑架3一侧倾斜设置,所述连接凸条31包括与第一防脱滑动面212平行设置的第二防脱滑动面311。所述连接槽21与连接凸条31之间设有调节板6。所述调节块2两端分别可拆卸连接有一组装饰板5,所述螺杆4一端与一组装饰板5抵触连接,另一组装饰板5上设有与螺杆4间隙配合的通孔51。所述螺杆4端部设有便于拆卸的调节纹路41。
22.上述技术方案,可解决机械手爪不能进行位置调节的问题,实现机器人手爪中心
与机床主轴中心精准调节,促使机器人手爪可适用于多种类的设备;在位置调节过程中,率先将紧定孔22进行松开,而后转动螺杆4,由于螺杆4的两端被限位、支撑架3不可环绕螺杆4作旋转,故支撑架3可沿螺杆4的中心轴线作移动,从而实现机器人手爪位置的精准调节,满足机器人手爪中心与机床主轴中心精准调节的需求,调节至需要的位置后,利用紧定孔22将支撑架3与调节块进行相对位置固定即可,操作方便。
技术特征:
1.一种桁架机器人手爪位置调节机构,其特征在于:包括桁架,所述桁架端部可拆卸连接有调节块,所述调节块中部可拆卸连接有支撑架,所述调节块位于与支撑架两侧对应处分别设有连接槽,所述支撑架端部设有可与连接槽滑动连接的连接凸条,所述调节块两侧均设有若干组与连接槽导通连接的紧定孔,所述紧定孔中心轴线与连接槽中心轴线相互异面垂直,所述支撑架位于朝向桁架的端部设有螺纹连接孔,所述螺纹连接孔内设有螺杆,所述螺杆两端分别与桁架铰接。2.根据权利要求1所述的一种桁架机器人手爪位置调节机构,其特征在于:所述连接槽包括与支撑架上端面贴合的限位面、与连接凸条抵触连接的第一防脱滑动面,所述第一防脱滑动面与限位面呈锐角且朝向支撑架一侧倾斜设置,所述连接凸条包括与第一防脱滑动面平行设置的第二防脱滑动面。3.根据权利要求1或2所述的一种桁架机器人手爪位置调节机构,其特征在于:所述连接槽与连接凸条之间设有调节板。4.根据权利要求1所述的一种桁架机器人手爪位置调节机构,其特征在于:所述调节块两端分别可拆卸连接有一组装饰板,所述螺杆一端与一组装饰板抵触连接,另一组装饰板上设有与螺杆间隙配合的通孔。5.根据权利要求1或4所述的一种桁架机器人手爪位置调节机构,其特征在于:所述螺杆端部设有便于拆卸的调节纹路。
技术总结
本实用新型涉及一种桁架机器人手爪位置调节机构,其特征在于:包括桁架,所述桁架端部可拆卸连接有调节块,所述调节块中部可拆卸连接有支撑架,所述调节块位于与支撑架两侧对应处分别设有连接槽,所述支撑架端部设有可与连接槽滑动连接的连接凸条,所述调节块两侧均设有若干组与连接槽导通连接的紧定孔,所述紧定孔中心轴线与连接槽中心轴线相互异面垂直,所述支撑架位于朝向桁架的端部设有螺纹连接孔,所述螺纹连接孔内设有螺杆,所述螺杆两端分别与桁架铰接。本实用新型的有益效果为:提供一种桁架机器人手爪位置调节机构,可解决机械手爪不能进行位置调节的问题,实现机器人手爪中心与机床主轴中心精准调节。心与机床主轴中心精准调节。心与机床主轴中心精准调节。
技术研发人员:陈征平
受保护的技术使用者:浙江勃展工业自动化设备有限公司
技术研发日:2021.09.13
技术公布日:2022/2/11