1.本发明涉及盾构设备领域,特别是涉及一种盾构机管路清理机器人及盾构机。此外,本发明还涉及一种盾构机管路清理方法。
背景技术:
2.近年来,由于盾构法的突出优势及盾构施工技术的迅速发展成熟,使得盾构法成为城市化进程发展和交通需求快速增长的隧道工程中得到广泛应用,而泥水平衡盾构机因其具有施工作业安全可靠、沉降控制精度高、成型隧道绿色环保等优势,使其在各大隧道工程,尤其是在需更好的控制隧道质量、保证施工安全性能等的穿江过海隧道工程施工中成为首选施工装备。
3.然而,泥水平衡盾构机施工虽然优势突出,但其依赖管路泵送出碴的特性也决定了渣石粒径必须受到严格控制,所以盾构机排浆泵前部的排浆管路上设置有采石箱;或者间控模式下的盾构机主排浆管口前还可设置有碎石机、格栅,以此确保大多数渣块能被顺利排出隧道外。但在卵石层中掘进时,直控模式下采石箱前段主排浆无法限制渣块粒径或间控模式下长条状渣块格栅难以全部阻挡,往往可能出现采石箱前段主排浆管被渣块堵塞卡死,反冲洗难以清除等情况,导致检测、拆管,甚至割补管路等清理工作费时费力,影响盾构效率、增大施工风险。
4.因此,如何提供一种克服上述问题的盾构机管路清理机器人是本领域技术人员目前需要解决的技术难题。
技术实现要素:
5.本发明的目的是提供一种盾构机管路清理机器人及盾构机,提升了对主排浆管内堵塞物质的破除效率,从而规避了检测、拆管、割补管路等费时费力的清理工作,大大提高了盾构机管路清理作业的安全性能及施工效率。本发明的另一目的是提供一种应用上述机器人的盾构机管路清理方法。
6.为解决上述技术问题,本发明提供一种盾构机管路清理机器人,包括支撑主体、破碎组件和密封头,所述破碎组件后端安装于所述支撑主体前端,所述破碎组件前端轴向贯穿所述密封头,所述密封头外周侧面与主排浆管内壁形状匹配并贴合,所述支撑主体外周设置有多组撑紧装置,多组所述撑紧装置能够径向张开并撑紧主排浆管内壁,所述破碎组件能够向前伸出冲击主排浆管内堵塞物质。
7.优选地,所述破碎组件包括轴向延伸的破碎锤,所述破碎锤后端套装有后安装座,所述破碎锤前端套装有前安装座,所述前安装座前端设置有用于所述破碎锤前端伸出的开口,所述后安装座前端固定连接所述前安装座后端。
8.优选地,所述前安装座的前端面设置有多个轴向延伸的安装槽,所述安装槽内安装有摄像头。
9.优选地,所述密封头套装于所述前安装座,所述前安装座轴向贯穿所述密封头,所
述支撑主体包括轴向延伸的基架,所述基架内部中空,所述后安装座插入所述基架前端,所述密封头与所述支撑主体前端固定连接。
10.优选地,所述后安装座后端设置有拉环,所述拉环由所述基架后端伸出。
11.优选地,所述撑紧装置包括固定安装于所述基架外壁的两个铰接座和柔性连接于所述基架外壁的双向油缸,两个所述铰接座轴向排列,所述双向油缸轴向延伸并位于两个所述铰接座之间,所述撑紧装置还包括两个支架和两个撑紧轮,所述支架的中部铰接与所述铰接座铰接,所述支架的外端与所述撑紧轮铰接,两个所述支架的内端分别铰接所述双向油缸的两个伸出端。
12.优选地,所述基架和所述后安装座为轴向延伸的六棱柱套筒,所述密封头和所述前安装座为轴向延伸的圆柱套筒,各部件通过螺栓固定连接,包括均匀分布的三组所述撑紧装置。
13.优选地,还包括连通主排浆管的三通换向阀以及连通所述三通换向阀的始发管,所述始发管后端连接有管线收放装置,所述管线收放装置上的管线连接所述支撑主体后端,初始状态时所述支撑主体放置于所述的始发管内,所述始发管两端设置有前空气注入阀和后空气注入阀。
14.本发明提供一种盾构机,包括主排浆管以及连接所述主排浆管的盾构机管路清理机器人,所述盾构机管路清理机器人具体为上述任意一项所述的盾构机管路清理机器人。
15.本发明提供一种盾构机管路清理方法,包括步骤:
16.根据主排浆管内压力变化判断是否堵塞,若发生堵塞则主排浆泵停止工作;
17.三通换向阀换向,使所述主排浆管与始发管连通,后空气注入阀打开,管线收放装置放线,将支撑主体、破碎组件和密封头沿所述主排浆管发送至堵塞处;
18.撑紧装置工作撑紧所述主排浆管内壁,破碎组件工作冲击堵塞物质;
19.清理完成后,所述管线收放装置收线,将所述支撑主体、所述破碎组件和所述密封头收回至始发管,所述三通换向阀换向,使所述主排浆管与设备管路连通。
20.本发明提供一种盾构机管路清理机器人及盾构机,包括支撑主体、破碎组件和密封头,所述破碎组件后端安装于所述支撑主体前端,所述破碎组件前端轴向贯穿所述密封头,所述密封头外周侧面与主排浆管内壁形状匹配并贴合,所述支撑主体外周设置有多组撑紧装置,多组所述撑紧装置能够径向张开并撑紧主排浆管内壁,所述破碎组件能够向前伸出冲击主排浆管内堵塞物质。
21.发现主排浆管内堵塞时,将机器人发送至堵塞位置,撑紧装置撑紧主排浆管内壁,固定机器人位置,然后破碎组件工作冲击堵塞物质,通过机器人快速破碎清理管内的堵塞物质,提升了对主排浆管内堵塞物质的破除效率,从而规避了检测、拆管、割补管路等费时费力的清理工作,大大提高了盾构机管路清理作业的安全性能及施工效率。
22.本发明还提供一种应用上述盾构机管路清理机器人的盾构机管路清理方法,由于上述盾构机管路清理机器人具有上述技术效果,上述盾构机管路清理方法也应具有同样的技术效果,在此不再详细介绍。
附图说明
23.图1为本发明所提供的盾构机管路清理机器人的一种具体实施方式的结构示意
图;
24.图2为本发明所提供的盾构机管路清理机器人的一种具体实施方式的分解示意图;
25.图3为本发明所提供的盾构机管路清理机器人的一种具体实施方式中破碎组件的分解示意图;
26.图4为本发明所提供的盾构机管路清理机器人的一种具体实施方式中支撑主体的后端示意图;
27.图5为本发明所提供的盾构机管路清理机器人的一种具体实施方式中撑紧装置的结构示意图;
28.图6为本发明所提供的盾构机管路清理机器人的一种具体实施方式的初始状态示意图;
29.图7为本发明所提供的盾构机管路清理机器人的一种具体实施方式的破碎前示意图;
30.图8为本发明所提供的盾构机管路清理机器人的一种具体实施方式的破碎后示意图。
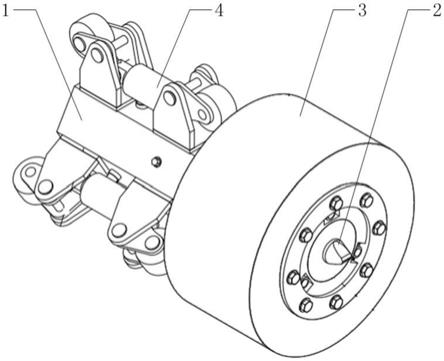
31.其中,1、支撑主体;11、基架;12、主体法兰;13、封板;2、破碎组件;21、破碎锤;22、后安装座;23、前安装座;24、摄像头;25、固定板;26、拉环;3、密封头;31、柱塞;32、柱塞法兰;4、撑紧装置;41、铰接座;42、双向油缸;43、支架;44、撑紧轮;5、三通换向阀;6、始发管;61、前空气注入阀;62、后空气注入阀;7、管线收放装置;8、主排浆管。
具体实施方式
32.本发明的核心是提供一种盾构机管路清理机器人及盾构机,提升了对主排浆管内堵塞物质的破除效率,从而规避了检测、拆管、割补管路等费时费力的清理工作,大大提高了盾构机管路清理作业的安全性能及施工效率。本发明的另一核心是提供一种应用上述机器人的盾构机管路清理方法。
33.为了使本技术领域的人员更好地理解本发明方案,下面结合附图和具体实施方式对本发明作进一步的详细说明。
34.请参考图1和图2,图1为本发明所提供的盾构机管路清理机器人的一种具体实施方式的结构示意图;图2为本发明所提供的盾构机管路清理机器人的一种具体实施方式的分解示意图。
35.本发明具体实施方式提供一种盾构机管路清理机器人,包括支撑主体1、破碎组件2和密封头3,破碎组件2后端安装于支撑主体1前端,破碎组件2前端轴向贯穿密封头3,即密封头3、破碎组件2和支撑主体1沿轴向由前向后依次设置,且破碎组件2的前端能够由密封头3前端伸出,密封头3外周侧面与主排浆管8内壁形状匹配并贴合,同时能够沿主排浆管8的走向自由移动,实现机器人在管内移动的导向,支撑主体1外周设置有多组撑紧装置4,多组撑紧装置4收缩时与主排浆管8内壁分离,使机器人能够在管内自由移动,多组撑紧装置4能够径向张开并撑紧主排浆管8内壁,在摩擦力的作用下使机器人位置固定,不会在管内移动,使破碎组件2向前伸出冲击主排浆管8内堵塞物质。
36.发现主排浆管8内堵塞时,将机器人发送至堵塞位置,撑紧装置4撑紧主排浆管8内
壁,固定机器人位置,然后破碎组件2工作冲击堵塞物质,通过机器人快速破碎清理管内的堵塞物质,提升了对主排浆管8内堵塞物质的破除效率,从而规避了检测、拆管、割补管路等费时费力的清理工作,大大提高了盾构机管路清理作业的安全性能及施工效率。
37.请参考图2至图5,图3为本发明所提供的盾构机管路清理机器人的一种具体实施方式中破碎组件的分解示意图;图4为本发明所提供的盾构机管路清理机器人的一种具体实施方式中支撑主体的后端示意图;图5为本发明所提供的盾构机管路清理机器人的一种具体实施方式中撑紧装置的结构示意图。
38.具体地,破碎组件2包括破碎锤21、后安装座22和前安装座23,其中破碎锤21轴向延伸,后安装座22套装在破碎锤21后端,前安装座23套装在破碎锤21前端,同时前安装座23前端设置有开口,用于破碎锤21前端的伸缩锤进出,且后安装座22前端固定连接前安装座23后端。进一步地,在后安装座22前端面边缘处设置安装法兰,通过轴向延伸的螺栓连接前安装座23后端面,即后安装座22与前安装座23的长度和大于破碎锤21的长度,还可通过径向延伸的螺栓连接后安装座22和破碎锤21,通过后安装座22和前安装座23实现各部件的稳定连接。
39.前安装座23的前端面设置有多个轴向延伸的安装槽,安装槽内安装有摄像头24,并通过卡在摄像头24头部的固定板25连接安装槽的限位台阶。具体地,设置均匀布置的三个摄像头24,也可根据实际工况需要,调整摄像头24的数量,或更换或添加清洗喷头,同时在安装法兰上设置管线穿过的线槽。
40.在本发明具体实施方式提供的盾构机管路清理机器人中,为了实现稳定连接,密封头3包括柱塞31和设置于柱塞31前端面内边缘处的柱塞法兰32,柱塞31套装于前安装座23,前安装座23轴向贯穿柱塞31,使柱塞31前端面和前安装座23前端面平,并在柱塞31各处设置密封圈,确保接触面严格密封。支撑主体1包括轴向延伸的基架11,基架11内部中空,基架11前端面外边缘处设置有主体法兰12,后安装座22插入基架11前端,柱塞31后端面与主体法兰12贴合并通过轴向延伸的螺栓连接,即柱塞31与基架11的长度和大于破碎组件2的长度,还可通过径向延伸的螺栓连接基架11和后安装座22。
41.具体地,基架11和后安装座22为轴向延伸的六棱柱套筒,柱塞31和前安装座23为轴向延伸的圆柱套筒,同时破碎锤21后端为六棱柱,前端为圆柱,各部件依次套装,同时六棱柱结构还能实现周向定位,也可根据情况调整各部件的形状和连接方式,均在本发明的保护范围之内。
42.进一步地,后安装座22后端设置有拉环26,机架11后端设置有封板13,封板13中部设置有通孔,拉环26由此通孔伸出,拉环26用于连接缆绳,通孔还可用于管线的进出。
43.在本发明具体实施方式提供的盾构机管路清理机器人中,撑紧装置4包括固定安装于基架11外壁的两个铰接座41和柔性连接于基架11外壁的双向油缸42,两个铰接座41轴向排列,双向油缸42轴向延伸并位于两个铰接座41之间,撑紧装置4还包括两个支架43和两个撑紧轮44,撑紧轮44采用高耐磨防滑材料设计,支架43的中部铰接与铰接座41铰接,支架43的外端与撑紧轮44铰接,两个支架43的内端分别铰接双向油缸42的两个伸出端。通过设置支架43的弯折结构,需要张紧时,双向油缸42两端伸出,推动两个支架43,支架43摆动,使两个撑紧轮44径向伸出,与主排浆管8相抵,缩回时,双向油缸42两端缩回,拉动两个支架43,支架43摆动,使两个撑紧轮44径向缩回,与主排浆管8分离。由于双向油缸42与基架11采
用柔性连接,确保双向油缸42的空间位置可微调,同时利用双向油缸42的微调可实现前后撑紧轮44的导向越障,增强本装置的通过性能。
44.具体地,可以设置均匀分布的三组撑紧装置4,各组相隔120度,各部件采用螺栓连接,或采用螺纹连接、卡接等,或根据情况调整撑紧装置4的具体结构,如何采用升降结构等,均在本发明的保护范围之内。
45.请参考图6至图8,图6为本发明所提供的盾构机管路清理机器人的一种具体实施方式的初始状态示意图;图7为本发明所提供的盾构机管路清理机器人的一种具体实施方式的破碎前示意图;图8为本发明所提供的盾构机管路清理机器人的一种具体实施方式的破碎后示意图。
46.在上述各具体实施方式提供的盾构机管路清理机器人的基础上,为了实现机器人活动部件的传送,还包括三通换向阀5、始发管6和管线收放装置7,三通换向阀5分别连通主排浆管8、始发管6和设备管路,始发管6后端连接管线收放装置7,管线收放装置7上的管线连接支撑主体1后端,管线收放装置7可以为电机驱动的绕线机构,初始状态时支撑主体1放置于的始发管6内,始发管6两端设置有前空气注入阀61和后空气注入阀62。
47.具体清理方式如下:
48.初始状态下,三通换向阀5保持开启方向不变,主排浆管8与设备管路连通,主排浆泵保持工作状态,盾构机进入反冲洗模式,对采石箱前部整段主排浆进行无差异冲洗,观察主排浆泵处压力表监测值p与预设值p0之间的关系,当达到预设反冲洗时间后,如观察结果保持p≤p0且波动不明显,则说明堵塞物质(渣块)被清理,管路已通畅,此时,再关闭相应阀组,排浆泵正常工作,盾构机正常排运渣浆。若观察结果保持p>p0且波动较明显,则可能堵塞物质未被清理,此时,机器人清理。
49.主排浆泵停止工作,三通换向阀5换向,使主排浆管8与始发管6连通,清理机器人安置在始发管6内,首先打开前空气注入阀61,向始发管6前部注入部分压缩空气,防止泥浆管路内泥浆倒流入始发管6内,然后关闭前空气注入阀61。
50.开启后空气注入阀62和管线收放装置7,预设好空气注入压力值和管线收放装置7的转速,使机器人向前匀速推进。
51.通过机器人前部设置的摄像头24实时反馈主排浆管8内的探测情况,当探测到堵塞物质的位置时,管线收放装置7停止放线,双向油缸42向两端双向伸出,使撑紧轮44牢牢撑紧主排浆管8内壁,降低空气注入压力值,完成堵塞物破碎准备工作。
52.启动破碎锤21工作,确保撑紧轮44与管壁摩擦力、柱塞31与管壁摩擦力以及空气注入对机器人总推力之和不小于破碎锤21工作所需反作用力,同时根据摄像头24探测反馈的信息,及时调整空气注入压力值、双向油缸42伸出量、管线收放装置7放线量,直至堵塞物被完全破碎。
53.然后双向油缸42缩回,调节至预设的空气注入压力值和管线收放装置7转速,使机器人向前匀速推进,对管路进行进一步探测,发现堵塞物则重复上述步骤,若无堵塞物则继续下一步。
54.待所有堵塞物全部破除之后,关闭后空气注入阀62,打开始发管6上的空气泄压阀,双向油缸42完全缩回,反向启动管线收放装置7,拖拽机器人快速回收至始发管6中,关闭空气泄压阀。
55.三通换向阀5换向,使主排浆管8与采石箱、排浆泵及其余排浆管连通,开启相应阀组,排浆泵工作,盾构机正常掘进排运渣浆。
56.除了上述盾构机管路清理机器人,本发明的具体实施方式还提供一种包括上述盾构机管路清理机器人的盾构机,该盾构机其他各部分的结构请参考现有技术,本文不再赘述。
57.以上对本发明所提供的盾构机管路清理机器人、盾构机及盾构机管路清理方法进行了详细介绍。本文中应用了具体个例对本发明的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本发明的方法及其核心思想。应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以对本发明进行若干改进和修饰,这些改进和修饰也落入本发明权利要求的保护范围内。