1.本发明涉及铁路道岔技术领域,更具体地说,它涉及一种铁路道岔智能除污系统。
背景技术:
2.道岔是一种使机车车辆从一股道转入另一股道的线路连接设备,也是轨道的薄弱环节之一,通常在车站、编组站大量铺设。有了道岔,可以充分发挥线路的通过能力。道岔的整体铺设中,道岔的类型包括直行道岔、为适应地形的弯曲道岔以及弯折道岔。
3.道岔在使用过程中,为了保证行车的安全,需要定期对道岔进行清理,目前的道岔除污通常是采用人工或是人工结合除污设备的方式来进行的,目前的道岔除污系统存在以下缺陷:人工清理的除污方式,除污效果差,工作效率低;人工与除污设备相结合的方式在工作时,需要人工控制除污设备的位置,才能使得除污设备精确除污,同样对人工的耗费大,除污效率仍然较低;并且,在人工进行人工除污时,对于列车、人员等的位置难以把控,难以实现在道岔闲时的准确时间内除污,导致存在一定的除污误差。
4.基于上述问题,本发明提出一种有效提高除污效率的铁路道岔智能除污系统。
技术实现要素:
5.针对实际运用中这一问题,本发明目的在于提出一种铁路道岔智能除污系统,具体方案如下:
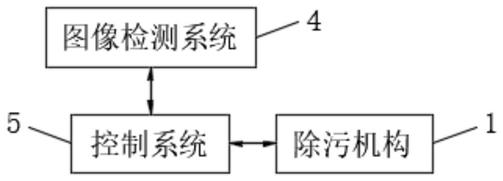
6.一种铁路道岔智能除污系统,包括除污机构、图像检测系统以及控制系统,所述除污机构、图像检测系统均与控制系统信号连接,其中:
7.所述除污机构用于为道岔除污,包括移动装置与清扫吹扫装置,所述移动装置用于驱动清扫吹扫装置在所述铁路道岔上移动,所述清扫吹扫装置在移动中实现对道岔的清扫和吹扫;
8.所述图像检测系统基于视频拍摄技术以获取运动目标的位置;
9.所述控制系统接入列车实时运行数据库,将图像检测系统所获取的运动目标的位置与列车实时运行数据库相结合,获得运动目标与目标道岔之间的准确距离,以判断目标道岔是否处于可除污状态。
10.进一步的,所述移动装置包括移动本体、驱动轮以及可伸缩限位轮,所述驱动轮驱动连接于移动本体上,驱动轮与道岔顶部接触,所述移动本体的两侧分别通过可伸缩复位杆连接可伸缩限位轮,所述可伸缩限位轮与道岔两侧边接触。
11.进一步的,所述可伸缩复位杆包括伸缩杆以及安装于伸缩杆上的复位杆,所述复位杆活动连接于伸缩杆上,所述复位杆外套设有复位弹簧。
12.进一步的,所述清扫吹扫装置包括两侧清理件与中间清理件,其中,
13.所述两侧清理件包括两侧支撑杆,两侧支撑杆的两端分别朝向道岔的两侧且分别连接一侧边清扫刷,每个所述侧边清扫刷上设有一侧边吹扫头;
14.中间清理件包括中间支撑杆,中间支撑杆上设有若干朝向道岔中间的中间清扫
刷;
15.中间支撑杆的两端分别与两个两侧支撑杆可伸缩连接。
16.进一步的,所述两侧支撑杆可拆卸安装于移动本体上。
17.进一步的,所述中间清理件还包括旋转驱动件,所述旋转驱动件安装于中间支撑杆上,旋转驱动件与中间清扫刷传动连接。
18.进一步的,所述图像检测系统采用视频采集镜头,视频采集镜头沿道岔设置若干,视频采集镜头用于获取运动目标的位置。
19.进一步的,所述运动目标包括移动车辆、人、动物中的一种或多种。
20.与现有技术相比,本发明的有益效果如下:本发明中,通过图像检测系统的视频拍摄情况,由控制系统结合列车实时运行数据库,判断该段目标道岔是否处于可除污的状态,保证了目标道岔的除污在准确的闲时内,有效避免了意外情况的发生;
21.通过移动装置带动两侧清理件和中间清理件,移动装置带动两侧清理件和中间清理件进行对道岔进行除污,由于移动装置上可伸缩复位杆的设置,使得整个移动装置可适应道岔类型的转变,从而无需人工控制除污机构的位置,即可实现对道岔的自适应除污,并且,在整个除污过程中,除了安装时需要人工操作,整个后期的除污过程均无需人工介入,大大提高了除污效率和除污效果。
附图说明
22.图1为本发明的实施例的系统示意图;
23.图2为本发明中除污机构的整体示意图;
24.图3为本发明中移动装置的结构示意图。
25.附图标记:1、除污机构;2、移动装置;21、移动本体;22、驱动轮;23、可伸缩限位轮;24、可伸缩复位杆;25、伸缩杆;26、复位杆;27、复位弹簧;3、清扫吹扫装置;31、两侧清理件;32、两侧支撑杆;33、侧边清扫刷;34、侧边吹扫头;35、中间清理件;36、中间支撑杆;37、中间清扫刷;38、旋转驱动件;4、图像检测系统;5、控制系统。
具体实施方式
26.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。
27.如图1-3所示,一种铁路道岔智能除污系统,包括除污机构1、图像检测系统4以及控制系统5,除污机构1、图像检测系统4均与控制系统5信号连接。除污机构1、图像检测系统4可通信传输信号。
28.首先,为了解决在道岔闲时的准确时间内进行除污,采用图像检测系统4来对道岔进行实时监控,基于视频拍摄技术通过获取运动目标的位置,以监控待除污道岔上是否有具备存在运动目标以及运动目标与除污道岔之间的距离。
29.图像检测系统4将检测到的结果传输至控制系统5,控制系统5接收到图像检测系统4的信息之后,进行综合判断,并且控制系统5接入列车实时运行数据库,将图像检测系统4所获取的运动目标的位置与列车实时运行数据库相结合,获得运动目标与目标道岔之间的准确距离,以及到达目标道岔的时间间隔,以判断目标道岔是否处于可除污状态。一旦控
制系统5判断目标道岔处于可除污的状态,即可通知工作人员,在该适当的时间内利用除污机构1进行道岔除污。
30.图像检测系统4采用视频采集镜头,视频采集镜头沿道岔设置若干,视频采集镜头用于获取运动目标的位置。
31.运动目标包括移动车辆、人、动物中的一种或多种。
32.除污机构1用于为道岔除污,包括移动装置2与清扫吹扫装置3,移动装置2用于驱动清扫吹扫装置3在铁路道岔上移动,清扫吹扫装置3在移动中实现对道岔的清扫和吹扫。
33.即在除污时,将除污机构1放置在道岔上,具体为依次安装好移动装置2和清扫吹扫装置3,移动装置2带动清扫吹扫装置3,通过清扫和吹扫的方式进行吹扫。
34.接着,为了除污机构1在除污时能够适应多种类型的铁路道岔,以使得在除污时能有效提高除污效率的问题。
35.具体地,本技术中,移动装置2包括移动本体21、驱动轮22以及可伸缩限位轮23,驱动轮22驱动连接于移动本体21上,驱动轮22与道岔顶部接触,优选的,驱动轮22沿着移动本体21的长度方向设置有两个,两个驱动轮22之间的距离不大于道岔的宽度,以使得驱动轮22能与道岔的顶部完全接触,保证移动装置2移动时的稳定性。移动本体21内设置驱动马达,用于带动驱动轮22的转动,驱动轮22的转动带动移动本体21的自动移动。
36.另外,为了防止移动装置2在移动的过程中出现偏移的情况,移动本体21的两侧分别通过可伸缩复位杆24连接可伸缩限位轮23,可伸缩限位轮23与道岔两侧边接触。可伸缩复位杆24设为l型结构,可伸缩限位轮23转动连接于可伸缩复位杆24上远离移动本体21的一端,以使得可伸缩限位与道岔的两侧边相接触,可伸缩限位轮23的设置不仅能起到限制移动装置2出现偏移情况的作用,还能将移动装置2移动的过程中,起到进一步移动的作用,从而提高整体移动的稳定性。
37.可伸缩复位杆24的设置,是为了适应移动装置2从一种类型的道岔转换至另一种类型的道岔上,例如为了适应移动装置2从直行道岔转换至弯曲道岔或是由直行道岔转换至弯折道岔上。
38.具体地,可伸缩复位杆24包括伸缩杆25以及安装于伸缩杆25上的复位杆26,复位杆26活动连接于伸缩杆25上,复位杆26外套设有复位弹簧27。并且,为了防止复位杆26从伸缩杆25脱离出来,伸缩环内可设置限位环,以在保证复位杆26能够自由活动的同时还能限制复位杆26的脱离。这样,当进行道岔转换时,复位杆26在伸缩杆25上自由伸缩,并由复位弹簧27复位至初始适应道岔的位置,这样,即使道岔的类型转换成何种情况,移动装置2均能保持适应性移动。
39.当除污机构1移动起来之后,通过清扫吹扫装置3即可对道岔实现全自动的、全面的除污。
40.具体地,在一个可能的实施例中,清扫吹扫装置3包括两侧清理件31与中间清理件35。
41.两侧清理件31用于清理单个道岔的两侧,一条道岔上有两个道岔,中间清理件35用于清理两个道岔之间的位置。
42.每个除污机构1配置两个移动装置2,两个移动装置2分别安装于横向对应位置上的两个道岔上,每个移动装置2上安装于两侧清理件31,两个两侧清理件31之间连接有中间
清理件35。
43.两侧清理件31包括两侧支撑杆32,两侧支撑杆32的两端分别朝向道岔的两侧且分别连接一侧边清扫刷33,每个侧边清扫刷33上设有一侧边吹扫头34。优选的,侧边吹扫头34安装于侧边清扫刷33的中间位置处,侧边吹扫头34上设有进气嘴,用于进气,以实现吹扫。工作时,移动装置2带动两侧清理件31进行移动,移动过程中,通过侧边清扫刷33对道岔侧边进行清扫,通过侧边吹扫头34对道岔侧边进行吹扫,通过清扫和吹扫的共同作用,实现对道岔侧边的除污。
44.两侧支撑杆32可拆卸安装于移动本体21上。优选的,两侧支撑杆32的底部设有螺旋杆,移动本体21上开设有与螺旋杆相对应的螺旋槽,通过螺旋杆与螺旋槽的共同作用,实现两侧支撑杆32与移动本体21之间的可拆卸连接。
45.中间清理件35包括中间支撑杆36,中间支撑杆36插设于两个侧边支撑杆上,以使得中间支撑杆36与侧边支撑杆之间为可拆卸连接,中间支撑杆36上设有若干朝向道岔中间的中间清扫刷37。这样,在移动装置2的移动过程中,中间清扫刷37对两个道岔中间的位置进行清扫。
46.并且,由于中间支撑杆36与两个侧边支撑杆之间为插设连接,使得中间支撑杆36的两端分别与两个两侧支撑杆32可伸缩连接。为了保证中间支撑杆36与侧边支撑杆之间的连接稳定性,可在二者连接之后利用螺栓进行固定。
47.此外,为了提高中间清扫件的清扫效果,中间清理件35还包括旋转驱动件38,旋转驱动件38安装于中间支撑杆36上,旋转驱动件38与中间清扫刷37传动连接。优选的,旋转驱动件38采用旋转电机。旋转电机带动中间清扫刷37转动,以实现边旋转边移动式的清扫,提高清扫、除污效果。
48.本发明的具体实施原理为:工作时,通过图像检测系统4的视频拍摄情况,由控制系统5结合列车实时运行数据库,判断该段目标道岔是否处于可除污的状态,若运动目标到达目标道岔的时间在预设范围内,即判断目标道岔处于可除污的状态,除污时,首先将移动装置2安装于两个平行道岔上,接着将两侧清理件31安装于移动装置2上,最后将中间清理件35连接于两侧清理件31上,启动移动装置2,移动装置2即可带动两侧清理件31和中间清理件35进行对道岔进行除污,由于移动装置2上可伸缩复位杆24的设置,使得整个移动装置2可适应道岔类型的转变,从而无需人工控制除污机构1的位置,即可实现对道岔的自适应除污,并且,在整个除污过程中,除了安装时需要人工操作,整个后期的除污过程均无需人工介入,大大提高了除污效率和除污效果。
49.以上所述仅是本发明的优选实施方式,本发明的保护范围并不仅局限于上述实施例,凡属于本发明思路下的技术方案均属于本发明的保护范围。应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理前提下的若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。