1.本发明涉及机器人技术领域,具体而言,主要涉及自重构机器人领域,尤其是模块化机器人应用技术。具体的,以一种立方体晶格构型设计为基础,结合球面外壳设计和对接接口设计,将机器人单元模块设计为三自由度可重构对接机器人模块关节,设计有四个对接接口,可实现重构对接组成串联、并联多分支、四足等构型。
背景技术:
2.随着对机器人技术的研究不断发展,近年来,对于模块化自重构机器人的研究逐渐引起科研人员的重视。模块化机器人以机器人单元模块为基础,为单元模块赋予对接能力,使其能够重构对接。传统机器人由于其适应复杂任务的能力受到其单一构型的限制,而模块化重构机器人可根据任务需求变换所需构型,具有强大的任务适应性和扩展能力,展现出广阔的应用场景。
3.目前,自重构机器人的设计、研究工作取得了一定发展,但仍存在技术缺陷。实现自重构真正应用于生产生活还有较大的差距,在负载能力、连接可靠性等方面还存在较大不足。
技术实现要素:
4.本发明提供一种三自由度重构机器人模块及重构机器人,其单个模块单元具有三个旋转自由度,可以多个模块对接后可重构成为串联、并联多分支、四足等构型。
5.本发明提供一种三自由度重构机器人模块及重构机器人,该机器人模块采用立方体晶格堆叠与球形外型设计,集成了立方体和球体的几何外形优点,设计有三个转动自由度、两对对接接口,转动自由度赋予模块一定的空间转动能力,且借助转动自由度可调整对接接口的相对位置;两对对接接口可实现每个模块1-4个的对接扩展数量,通过接口的对接扩展可实现多模块的对接重构,实现串联、并联多分支、四足等构型,接口之间的空间位置关系可实现同轴、平行、垂直、相交等关系。
6.为达到上述目的,本发明采用以下解决方案:
7.本发明提出一种基于立方体晶格堆叠和球形外形设计的设计方案,使模块机器人具有立方体晶格对接拓扑特性和接口的旋转互相代替特性。
8.本发明提出一种单模块三自由设计方案,三个旋转自由度之间的空间位置关系可实现同轴、平行、垂直、相交等关系。
9.本发明提出一种四个接口(两对主/被动对接接口)对接方式设计,两对对接接口可实现每个模块1-4个的对接扩展数量,通过接口的对接扩展可实现多模块的对接重构,实现串联、并联多分支、四足等构型。
10.本发明提供一种三自由度自重构机器人单元模块,其包括外壳、主动对接接口、被动对接接口、主旋转关节机构、接口旋转关节驱动机构、电气控制系统。
11.所述外壳为两个半球形外壳,为球形被其外接正方体的体对角面截为两个半球形
外壳所得,两个半球壳之间有交叉辊子轴承等支撑,每个半球壳都被正方体的两个表面截出两个截面,这两个截面互相垂直,与球壳被截面夹角为45
°
,球壳上开有便于安装装配的观察孔、安装孔;
12.所述对接接口由两对主/被动对接接口组成,共有4个接口,所述接口安装在外壳被正方体截的四个截面上,其中主动对接接口可与被动对接接口对接相连,实现多个模块对接重构为多种空间构型;
13.所述主旋转关节机构由连接轴、驱动电机、连接法兰等组成,所述主旋转关节机构安装固定在所述外壳之一,负责作为模块机器人的主关节,驱动两个半球壳相互旋转;
14.所述接口旋转关节驱动机构由接口旋转关节驱动电机和主动对接接口组成,所述接口旋转关节驱动电机安装固定在所述外壳上,输出与主动对接接口相连接,实现两个主动对接接口的旋转自由度;
15.所述电气控制系统由单片机、集线器等组成,负责模块内运动、通讯等控制;
16.所述三个旋转自由度之间的空间位置关系可实现同轴、平行、垂直、相交等关系,其具体实现方式为:1)左、右半球壳各自的主动/被动对接接口安装面垂直,与球壳被截面夹角为45
°
;2)左半球壳的主动/被动对接接口和右半球壳的主动/被动对接接口之间的位置关系可以实现同轴、垂直、相交;3)不同模块间的三个旋转自由度相对位置关系组合为同轴、平行、垂直、相交关系;
17.本发明提出了一种三自由度重构机器人模块及重构机器人,其优点在于,模块集成了立方体和球体的几何外形优点,设计有三个转动自由度、两对对接接口,可以实现模块间对接重构为串联、并联多分支、四足等构型,使机器人功能大大拓展,应用领域大大拓宽。
附图说明
18.为了更清楚地说明本技术实施例的技术方案,下面将对具体实施方式中所需要使用的附图作简单地介绍,应当理解,以下附图仅示出了本技术的某些实施例,因此不应被看作是对范围的限定,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他相关的附图。
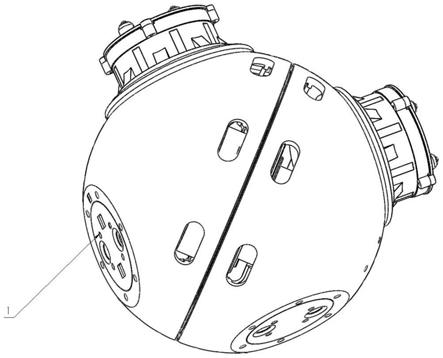
19.图1为三自由度自重构机器人单元模块整体结构图;
20.图2为三自由度自重构机器人单元模块内部结构剖视图;
21.图3为主旋转关节机构结构图;
22.图4为左半球壳结构图;
23.图5为右半球壳结构图;
24.图6为三自由度可对接重构机器人模块单元45
°
侧视图;
25.图7为两个接口旋转自由度轴线垂直状态图;
26.图8为两个接口旋转自由度轴线相交状态图;
27.图9为两个接口旋转自由度轴线共线状态图;
28.图10为多个模块串联构型示意图;
29.图11为多个模块并联双分支构型示意图。
具体实施方式
30.为了更加清楚的讲解本发明的目的、技术方案及优点,下面结合附图及实施例,对本发明进行详细说明。应当说明,此处所描述的具体实施例仅仅用于解释本发明,并不用于限定本发明。
31.为使本技术实施例的目的、技术方案和优点更加清楚,下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本技术一部分实施例,而不是全部的实施例。通常在此处附图中描述和示出的本技术实施例的组件可以以各种不同的配置来布置和设计。
32.因此,以下对在附图中提供的本技术的实施例的详细描述并非旨在限制要求保护的本技术的范围,而是仅仅表示本技术的选定实施例。基于本技术中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本技术保护的范围。
33.应注意到:相似的标号和字母在下面的附图中表示类似项,因此,一旦某一项在一个附图中被定义,则在随后的附图中不需要对其进行进一步定义和解释。
34.实施例
35.本发明提供一种三自由度重构机器人模块及重构机器人,模块具有自主对接重构能力。以下结合图1-10对三自由度可对接重构机器人模块单元结构进行详细描述。
36.图1为三自由度可对接重构机器人模块单元整体结构图,图2为三自由度可对接重构机器人模块单元内部结构剖视图,图3为主旋转关节机构结构图,图4为左半球壳结构图,图5为右半球壳结构图,图6是三自由度可对接重构机器人模块单元45
°
侧视图,图7为两个接口旋转自由度轴线垂直状态图,图8为两个接口旋转自由度轴线相交状态图,图9为两个接口旋转自由度轴线共线状态图,图10为多个模块重构连接构型示意图,图11为多个模块并联双分支构型示意图。
37.如图1、图2所示,三自由度可对接重构机器人模块单元主要由左半球壳2、右半球壳6、主动对接接口3、被动对接接口1、主旋转关节机构4、接口旋转关节驱动电机7、电气控制系统5组成。左半球壳2和右半球壳6上各安装有一个主动对接接口3与一个被动对接接口1,其中主动对接接口3通过止口、螺栓与两个半球壳形成固定连接;被动对接接口1与两个半球壳采用螺栓和凹凸式法兰连接形成固定连接。主动对接接口3和被动对接接口1可以与其他模块的对应对接接口对接而相连,实现模块间的对接连接。主旋转关节机构4固定端与右半球壳6通过凹凸结构和螺栓形成固定连接,主旋转关节机构4的输出端与左半球壳2相固定,输出端可以用来驱动左半球壳2旋转,实现主关节的一个旋转自由度。电气控制系统5通过螺钉安装在右半球壳6上,负责机器人模块单元的通讯、供电、感知、运动控制。
38.如图4、图5所示,左半球壳2和右半球壳6之间可以相对转动,二者之间由轴承连接。左半球壳2上有左半球壳被动接口安装面201和左半球壳主动接口安装面203,两个面是由左半球壳壳体202被壳体外形几何球面的外接正方体表面所截而得,两个安装面互相垂直,两个安装面与半球的圆截面夹角为45
°
。轴承内圈安装法兰204与左半球壳壳体202通过凹凸结构和螺栓固定连接,左半球壳壳体202上开有安装观察孔方便安装。右半球壳6上有右半球壳被动接口安装面601和右半球壳主动接口安装面603,两个面是由右半球壳壳体602被壳体外形几何球面的外接正方体表面所截而得,两个安装面互相垂直,两个安装面与
半球的圆截面夹角为45
°
。轴承外圈安装法兰604与右半球壳壳体602通过凹凸结构和螺栓固定连接,右半球壳壳体602上开有安装观察孔方便安装。交叉滚子轴承205内圈安装于轴承内圈安装法兰204上,通过轴承轴端挡圈206进行轴向固定,交叉滚子轴承205外圈安装于轴承外圈安装法兰604上。
39.如图3所示,主旋转关节机构4中,输出轴401安装在主关节驱动电机404的输出端,其末端通过平面凸台与左半球壳壳体202上的凹槽配合,驱动左半球壳2旋转;主关节驱动电机404通过两个主关节驱动电机固定法兰405安装在右半球壳6上面,与右半球壳6固定。主关节驱动电机404转动时带动输出轴401运动进而驱动左半球壳2旋转,实现主关节的旋转自由度。主关节滑环402固定端通过滑环固定件403与主关节驱动电机404固定在一起,滑环输出端与输出轴401固定在一起,可以将电气控制系统5的通讯、供电、感知、运动控制等信号传递到左半球壳2一端。
40.主旋转关节机构4带动左半球壳2旋转,进而带动左半球壳2上的主动对接接口3与被动对接接口1旋转,从而使左半球壳2上的主动对接接口3与被动对接接口1与右半球壳6上的主动对接接口3与被动对接接口1相对位置发生变化,即可实现接口之间的同轴、平行、垂直、相交等关系。
41.最后应当说明,以上实施方案仅用以说明本发明申请的技术方案而非限制,尽管参照以上较佳实施方案对本发明做了详细说明,本领域的普通技术人员应当理解,可以对本技术的技术方案进行修改或等同替换都不应脱离本技术技术方案的精神和范围。