1.本发明涉及机器人技术领域;具体地说,涉及一种机器蛙人,可用于构建该机器蛙人的手爪组件,及可用于构建该手爪组件的记忆合金丝驱动器。
背景技术:
2.随着对海洋的探索与认识的深入,开发和利用海洋资源成为主旋律,在复杂多变的海洋环境中,水下机器人将成为开发海洋资源过程中必不可少的设备;例如近年来随着海洋核电、海上风电、海洋石油等重大海洋资源的开发利用得到迅猛的发展,水下装备的精准施工安装以及安全运行维护的需求急剧增长。但对于部分作业任务,仍需依赖于经验丰富的潜水员来完成,而潜水员工作存在着风险大难度高的致命缺点,并且只能在较好海况下进行作业,且在水深超过350米后,潜水员将无法再进行下潜作业。
3.科学家为了提高作业安全,不断地研发出机器蛙人,这些机器蛙人主要是基于仿人机械臂进行工作,例如专利号为jph08240689的专利文献所公开的类人机器人,即机器蛙人,虽然他们由于仿人结构,而能使用他们完成部分精细工作,但由于其手掌组件为采用手指气缸等夹持机构进行构建,容易对操作物造成损伤,且需要在抓握过程中进行精准的位置控制。
4.为了解决上述问题,本技术人在公开号为cn111152244a的专利文献中公开了一种机器蛙人,该机器蛙人包括机身及安装在该机身上的仿人机械臂,该仿人机械臂包括肩关节、大臂、肘关节、小臂及通过腕关节与小臂的末端连接的手掌组件。在该专利文献中,其手掌组件为基于形状记忆合金丝进行工作,并对驱动机构的结构进行改进,能在提高指节动作响应速度的同时,有效地缩短其合金丝的有效长度。
5.如上述专利文献等已公开的现有技术内容可知,现有技术中存在较多的利用形状记忆合金丝进行驱动的手爪组件或者其他由合金丝驱动器所驱动的作业机构,但是它们均存在以下问题:对形状记忆合金丝加热之后的复位通常基于复位弹簧的复位力,但实际的复位速度取决于形状记忆合金丝的冷却变相速度,难以获得较高的响应速度;从而在实际设计过程中存在响应速度与能耗这一矛盾,即记忆合金丝在水中可以获得更好的冷却效果,这有助于它获得更高的运动速度,但过快的冷却会导致加热过程中存在严重的能源浪费,而保温处理可以减少能源浪费,但也会使冷却速度再次降低。
6.此外,在水下环境中,由形状记忆合金丝所构建的驱动器存在不易密封的问题;及现有机器蛙人的仿人机械臂通常为通过肘关节机构而驱使两臂结构及臂与机身或手掌组件之间的相对转动,导致其难以像人手臂一样进行扭转动作,而无法实现较为灵活的动作。
技术实现要素:
7.本发明的主要目的是提供一种机器蛙人,以基于对其仿人机械臂上的抓取机构的结构改进,能有效平衡抓取或释放过程中的响应速度与能耗;
8.本发明的第二目的是提供一种基于结构改进的驱动器结构所构建的机器蛙人,而
能有效地简化记忆合金丝的密封问题;
9.本发明的第三目的是提供一种基于结构改进的仿人机械臂的机器蛙人,以提高其手臂操作的灵活性,且能简化对手臂扭转动作的控制方法;
10.本发明的第四目的是提供能用于构建上述机器蛙人的手爪组件与记忆合金丝驱动器。
11.为了实现上述主要目的,本发明提供的机器蛙人包括机身及安装在机身上的仿人机械臂,仿人机械臂包括手爪组件;手爪组件包括掌部、抓放驱动器及可摆动地安装在掌部上的手爪,抓放驱动器用于驱使手爪在抓紧位置与释放位置间往复摆动;抓放驱动器包括用于驱使手爪由释放位置摆动至抓紧位置的抓紧驱动器,及用于驱使手爪由抓紧位置摆动至释放位置的释放驱动器;抓紧驱动器与释放驱动器均为基于预载力差分驱动的记忆合金丝驱动器;记忆合金丝驱动器包括支架及可沿第一方向移动地安装在支架上的动子,动子通过驱动连接件与手爪连接;沿第一方向,在动子的前后两侧上各布设有一个紧拉驱动器,均用于驱使动子朝远离另一个紧拉驱动器的方向移动;紧拉驱动器包括形状记忆合金丝、预载用弹性机构及预载连接件;沿第一方向,预载连接件可在靠近动子的第一位置与远离动子的第二位置间往复移动;形状记忆合金丝的一端与动子固连,另一端与预载连接件固连;预载用弹性机构的弹性恢复力用于迫使预载连接件由第一位置移至第二位置。
12.在上述技术方案中,通过两侧布置用于施加的弹性预载力的弹性机构,即在预定预载力的基础上,当对一侧的预载连接件施加足够大的反向力时,即使记忆合金丝未达到伸缩所需的温度时,仍能进行另一个方向的响应驱动,即采用了预载力差分驱动方案,能有效地解决sma驱动器水下散热和加热这一对矛盾,从而能够兼顾驱动速度快与功耗低的优点,使得手爪能够在保证高速运动的的前提下极大地降低驱动功耗,可有效地延长该机器蛙人的续航能力。
13.具体的方案为预载用弹性机构为压簧;紧拉驱动器包括套装在压簧外的套筒,固定安装在套筒的一端上的限位端盖板,及固定安装在套筒的另一端上的止挡端盖板;预载连接件为可移动地套装在套筒内的环体;压簧压于止挡端盖板与环体之间,止挡端盖板上设有供形状记忆合金丝可移动穿过的过丝孔;预载连接件抵靠限位端盖板时,其位于第二位置上。该技术方案结构简单,且能有效地确保工作的有效性。
14.更具体的方案为手爪为柔性爪;掌部包括固连座、安装座及支撑地固定该两座之间的支撑架,柔性爪的固定端通过铰轴而可摆动地安装在安装座上,驱动连接件为牵引线,抓紧驱动器与释放驱动器均安装在固连座上,且分别通过一根牵引线与柔性爪连接。该技术方案基于牵引线传递驱动力而能有效地简化设备的结构。
15.为了实现上述第二目的,本发明提供的优选的方案为在形状记忆合金丝外套装有柔性管壳,及填充于柔性管壳与形状记忆合金丝之间的凝胶状混合物;柔性管壳由乙烯-醋酸乙烯共聚物制成,而凝胶状混合物由硅油与硅脂按4:1的比例混合而成;并在柔性管壳内布设有温度传感器。
16.在上述技术方案中,基于硅混合物的sma丝处理方案,有效地保证了sma丝的抗腐蚀性的同时,基于合理化的混合物流动性与粘滞系数,能在低阻力下提升混合物的水下使用寿命,从而能够更好地对记忆合金丝驱动器进行密封处理。
17.为了实现上述第三目的,本发明提供的优选方案为仿人机械臂包括肩关节、大臂、
肘关节、小臂及腕关节,手爪组件通过腕关节而与小臂的末端连接,在机身上布设有臂动作驱动单元;大臂和/或小臂为杆状的无极弯扭用驱动机构;无极弯扭用驱动机构包括可弯曲的刚性杆体,套装在刚性杆体外且在二者间存有套装间隙的编织合金网套,填充于刚性杆体与编织合金网套之间的柔性填充套筒,固设在编织合金网套的两端上且与刚性杆体的端部固连的外连环,及紧套在编织合金网套外的柔性包裹套筒;外连环与肩关节、肘关节或腕关节的关节驱动机构固连;编织合金网套为由形状记忆合金丝编织而成圆筒状网套结构,且其上网孔为由两两相交的四根形状记忆合金丝段所围成夹角可调的菱形网孔结构;编织合金网套的两端固连在外连环上;在编织合金网套上,两段相交的形状记忆合金丝段在该二者的相交处通过节点连接件进行不可移动地固连;臂动作驱动单元通过一端连接于节点连接件上的导线,而对布设在该节点连接件上的相交两根形状记忆合金丝段的交接点提供等电位的驱动电压。
18.在上述技术方案中,通过一个节点连接件而对于该节点连接的四段形状记忆合金丝段提供同电位的驱动电压,并基于对不同节点连接件赋予不同电压而可控制位于该两节点连接件之间的一段形状记忆合金丝段的伸缩动作,并借助刚性杆体的支撑与紧拉作用,从而能实现任意方向的弯曲及无极的扭转,并配合以关节驱动机构的摆动驱动,从而有效地提高整个仿人机械臂的操作灵活性,且能简化对无极弯扭用驱动机构的驱动控制方法。
19.为了实现上述第四目的,本发明提供的驱动器为基于预载力差分驱动,且为基于合金丝进行驱动的记忆合金丝驱动器;该记忆合金丝驱动器包括支架及可沿第一方向移动地安装在支架上的动子;沿第一方向,在动子的前后两侧上各布设有一个紧拉驱动器,均用于驱使动子朝远离另一个紧拉驱动器的方向移动;紧拉驱动器包括形状记忆合金丝、预载用弹性机构及预载连接件;沿第一方向,预载连接件可在靠近动子的第一位置与远离动子的第二位置间往复移动;形状记忆合金丝的一端与动子固连,另一端与预载连接件固连;预载用弹性机构的弹性恢复力用于迫使预载连接件由第一位置移至第二位置。
20.在上述技术方案中,通过在动子两侧布置用于施加的弹性预载力的弹性机构,即在预定预载力的基础上,当对一侧的预载连接件施加足够大的反向力时,即使记忆合金丝未达到伸缩所需的温度时,仍能进行另一个方向的响应驱动,即采用了预载力差分驱动方案,能有效地解决sma驱动器水下散热和加热这一对矛盾,从而能够兼顾驱动速度快与功耗低的优点,使得驱动能够在保证高速运动的的前提下极大地降低驱动功耗,可以有效地延长搭载该驱动器小型设备的续航。
21.具体的方案为预载用弹性机构为压簧;紧拉驱动器包括套装在压簧外的套筒,固定安装在套筒的一端上的限位端盖板,及固定安装在套筒的另一端上的止挡端盖板;预载连接件为可移动地套装在套筒内的环体;压簧压于止挡端盖板与环体之间,止挡端盖板上设有供形状记忆合金丝可移动穿过的过丝孔;预载连接件抵靠限位端盖板时,其位于第二位置上。
22.优选的方案为动子为可移动地安装在支架上的滑块。
23.优选的方案为在形状记忆合金丝外套装有柔性管壳,及填充于柔性管壳与形状记忆合金丝之间的凝胶状混合物;柔性管壳由乙烯-醋酸乙烯共聚物制成,而凝胶状混合物由硅油与硅脂按4:1的比例混合而成;并在柔性管壳内布设有温度传感器。
24.为了实现上述第四目的,本发明提供的手爪组件包括掌部、抓放驱动器及可摆动
地安装在掌部上的手爪,抓放驱动器用于驱使手爪在抓紧位置与释放位置间往复摆动;抓放驱动器包括用于驱使手爪由释放位置摆动至抓紧位置的抓紧驱动器,及用于驱使手爪由抓紧位置摆动至释放位置的释放驱动器;抓紧驱动器与释放驱动器均为基于预载力差分驱动的记忆合金丝驱动器;记忆合金丝驱动器为上述任一技术方案所描述的驱动器。
附图说明
25.图1为本发明实施例中机器蛙人的立体图;
26.图2为本发明实施例1中手爪组件的结构图;
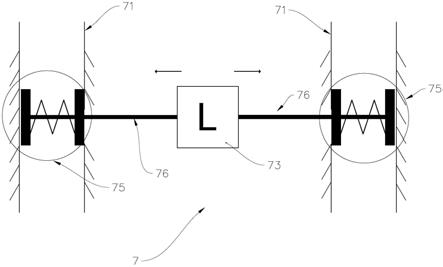
27.图3为本发明实施例1中记忆合金丝驱动器的结构图;
28.图4为本发明实施例1中抓放驱动器的结构示意图;
29.图5为本发明实施例1中抓放驱动器的结构示意图;
30.图6为本发明实施例4中记忆合金丝组件的结构示意图;
31.图7为本发明实施例2中无极弯扭用驱动机构的立体图;
32.图8为本发明实施例2中无极弯扭用驱动机构的结构示意图;
33.图9为本发明实施例2中编织合金网套的结构示意图;
34.图10为本发明实施例2中编织合金网套上节点施加驱动电压之前的局部形状记忆合金丝段的结构示意图;
35.图11为本发明实施例2中编织合金网套上节点施加驱动电压之后,产生扭转时的局部形状记忆合金丝的结构示意图;
36.图12为本发明实施例2中编织合金网套上节点施加驱动电压之前的局部形状记忆合金丝的结构示意图;
37.图13为本发明实施例2中编织合金网套上节点施加驱动电压之后,产生弯曲时的局部形状记忆合金丝的结构示意图;
38.图14为本发明实施例2中进行扭转操作的过程中,编织合金网套上不同节点处的电压施加示意图;
39.图15为本发明实施例2中进行弯曲操作的过程中,编织合金网套上不同节点处的电压施加示意图。
具体实施方式
40.以下结合实施例及其附图对本发明作进一步说明。
41.本发明的主要构思是通过对仿人机械臂手爪组件的结构进行改进,尤其是对驱动器的结构进行改进,以能有效地平衡手爪在抓取或释放过程中的响应速度与能耗;此外还对仿人机械臂的臂体结构与合金丝组件的结构进行改进,以进一步的提高仿人机械臂的操作性能。
42.实施例1
43.参见图1,在本实施例中,机器蛙人的整体结构与公开号为cn111152244a的专利文献所公开的机器蛙人的结构类似,具体结构如图1所示,该机器蛙人1具体包括机身10及安装在该机身10上的仿人机械臂11与控制单元,该仿人机械臂11包括肩关节12、大臂13、肘关节14、小臂15及通过腕关节与小臂15的末端连接的手爪组件2。在工作过程中,通过光纤01
与位于水面上的中转站02进行通信连接。
44.如图2至图5所示,手爪组件2包括掌部、抓放驱动器及可摆动地安装在掌部上的手爪21,其中,手爪21的数量为多根,具体为三根或两根;抓放驱动器用于驱使手爪21在抓紧位置与释放位置间往复摆动,其中,在抓紧位置时,三根根弯曲状的手爪21受同步驱动而闭合,以用于对鱼等目标物体进行抓取;而在释放位置时,三根弯曲状的手爪21受同步驱动而张开,以对夹持在其上的目标物体进行释放。控制单元用于根据控制指令而对抓放驱动器的动作进行控制。
45.如图2至图5所示,抓放驱动器包括用于驱使手爪21由释放位置摆动至抓紧位置的抓紧驱动器,及用于驱使手爪21由抓紧位置摆动至释放位置的释放驱动器,二者均安装在掌部上;在本实施例中,抓紧驱动器与释放驱动器均为如图3所示的记忆合金丝驱动器7。该记忆合金丝驱动器7基于预载力差分驱动,具体包括支架71及可沿第一方向移动地安装在支架71上的动子73,该第一方向为如图3中箭头所示的方向,动子73通过驱动连接件74与手爪21连接,在本实施例中驱动连接件74采用牵引线进行构建,并可基于公开号为cn111152244a的专利文献所公开的手指摆动驱动结构进行构建,从而拉动驱动。
46.掌部包括固连座22、安装座23及支撑地固定该两座之间的支撑架24,从而在两者间形成用于布设牵引线的空间;柔性爪21的固定端通过铰轴25而可摆动地安装在安装座23上;由于驱动连接件74采用牵引线进行构建,抓紧驱动器与释放驱动器均安装在固连座22上,且分别通过一根牵引线与柔性爪21连接,从而对抓取与释放过程进行释放。
47.对于记忆合金丝驱动器7的具体结构,沿前述第一方向,在动子73的前后两侧上各布设有一个紧拉驱动器75,该两个紧拉驱动器75均用于各自一侧驱使动子73朝远离另一个紧拉驱动器75的方向移动。如图5所示,在结构上,紧拉驱动器75包括安装支架、形状记忆合金丝76、预载用弹性机构77及预载连接件78。其中,预载连接件78与形状记忆合金丝76固连,预载用弹性机构77采用压簧进行构建,而安装支架包括套装在该压簧外的套筒791,固定安装在该套筒791的一端上的限位端盖板792,及固定安装在该套筒791的另一端上的止挡端盖板793。预载连接件78具体为可移动地套装在该套筒791内的环体,即套筒791构成预载连接件78沿其轴向移动的限位导向机构。压簧压于止挡端盖板793与环体之间,并在止挡端盖板793与限位端盖板792上均设有过丝孔,用于供形状记忆合金丝76的可移动穿过,并用于导线的布设穿过。形状记忆合金丝的一端与动子固连,另一端与预载连接件固连;预载用弹性机构的弹性恢复力用于迫使预载连接件由第一位置移至第二位置。
48.在工作过程中,由于安装支架具有用于对预载连接件78沿前述第一方向的可移动范围进行限制的限位端盖板792与止挡端盖板793,从而可使预载连接件78可在靠近动子73的第一位置与远离动子的第二位置间往复移动,且当预载连接件78抵靠限位端盖板792时,预载连接件78位于第二位置上。
49.在安装过程中,将手爪21打开到最大张开角度时,即位于释放位置时,再安装收缩用的驱动丝,确保驱动丝绷直;随后,将手爪闭合后,即位于抓紧位置时,再安装张开用的驱动丝,同样确保驱动丝绷直。对于需提供更大驱动力的方案,为配置多根并排布置的驱动丝,且它们之间采用并联方式进行供电。
50.整个手爪组件2通过三根电线与开关或控制板相连,除地线外的两根分别用于择一地连通张开用形状记忆合金丝或闭合用形状记忆合金丝。手爪组件2的控制方法为通过
带比例系数的温度积分前馈量,配合用于对形状记忆合金丝的温度进行检测热电偶的温度输出数据进行闭环控制,其温度控制逻辑如下式(1)所示:
[0051][0052]
其中,m是一个常数,t是时间,t_0是初始温度,t
sensor
为热电偶测试温度,。sma丝的牵引力来自温度引起的内部相变。单向形状记忆效应形状记忆合金丝可以在拉伸后通过相变恢复其形状,而本专利所使用的双向形状记忆效应形状记忆合金丝经过反复训练,可以在两种长度之间自主切换,该形状记忆合金丝不会记忆除了长度以外的形状变化,其中,马氏体相被训练到更长的长度,而奥氏体相被训练到更短的长度,经这种训练最终使得所得到的形状记忆合金丝能够加热收缩和冷却伸长。
[0053]
如图4所示,以手爪捕捉目标进入收集箱并释放的动作为例,将抓握方向设置为左侧,负载力方向设置为右侧,形状记忆合金丝的应力受温度影响,具体如下式2所示:
[0054][0055]
选择不同的预载力f_preload能够实现不同的驱动特性,作为优选,以如下式(4)所示条件为例:
[0056][0057]
在抓取过程中,接触力由f
load
=f
sma
<f
preload
提供。当手爪即将释放时,右侧sma丝被加热,左侧sma线开始冷却。所述经过处理的sma丝加热速率高于冷却速率。经过短暂的加热时间后,右侧sma丝达到最大输出力f
sma max
。此时左边的sma丝还没有冷却到相变温度,所以它的长度限制了驱动器的运动,这在普通的驱动器中很常见。在所述预载力差分驱动中,弹簧将被进一步压缩,运动方程如下式(5)所示:
[0058][0059]
其中,k是弹性体的刚度系数,m是系统的总质量,a是系统的加速度,ε是sma的应变。与差分驱动相比,x
pdd
允许驱动器在sma丝充分冷却之前加速。在双向偏置力驱动中,情况有所不同。除了左侧的位移,右侧的位移也随着f
sma
的增长而增加。运动方程如下式(6)所示:
[0060][0061]
在相同温度下,sma的σ随ε的增加而迅速衰减。这意味着在相同的加热功率下,σ
bfd
远小于σ
pdd
。这会导致其驱动速度降低。在随后的阶段,右侧sma丝的σ逐渐增大并达到最大值,左侧sma丝下降到相变温度并逐渐伸长,但仍未能完全恢复到原来的长度。此时,预载差分驱动能够率先在左侧弹性体的缓冲下完成最大位移。它允许驱动器在其sma丝冷却完成之前完成一次动作。动作完成后,驱动器有足够的时间等待sma丝恢复到原来的长度。此功能极大地提高了sma驱动器在水中的响应速度。对于双向偏置力驱动,尽管左侧弹簧也可以充当缓冲器,右侧弹簧将导致位移损失。这将导致残余位移仍需等待sma恢复其原始长度才能完成。剩余位移如下式(7)所示:
[0062][0063]
在上述各个公式中,其相关物理量的含义如下表1所示:
[0064]
表1上述计算公式所涉及的物理量的含义
[0065][0066][0067]
在本实施例中,由于手爪21所采用的驱动器具有热切换特性,即可以在双程记忆效应的形状记忆合金丝冷却之前完成驱动动作;因此,可以在保温处理的状态下依然能在水下保持高速驱动。
[0068]
实施例2
[0069]
作为对本发明实施例2的说明,以下仅对与上述实施例1的不同之处进行说明。在本实施例中,控制单元包括臂动作驱动单元;如图1所示,肩关节12、肘关节14及腕关节能够实现一个以上自由度的弯曲操作,在本实施例中为一个自由度的摆动操作,具体基于关节电机进行驱动由其连接的两相邻结构之间的相对摆动,例如肘关节14驱使大臂13相对小臂15摆动;而大臂13与小臂15的具体结构采用如图7及图8所示的无极弯扭用驱动机构3进行构建,也可以其中一者采用无极弯扭用驱动机构3进行构建,若两者均采用其进行构建而能够更好地提高操作灵活性。
[0070]
参见图7及图8,该无极弯扭用驱动机构3包括臂主体及固设在该臂主体两端上连接环30;其中,臂主体包括可弯曲的刚性杆体31,套装在该刚性杆体31外的编织合金网套4,填充于刚性杆体31与编织合金网套4之间的柔性填充套筒32,固设在编织合金网套4的两端上的盘丝环33,及紧套在编织合金网套4外的柔性包裹套筒34。其中,刚性杆体31被配置为轴向不可拉伸及压缩的可弯曲杆体结构,例如,可进行弯曲但轴向无法进行拉伸的钢丝绳,且固设在编织合金网套4两端上的连接环30与刚性杆体31的端部固连,从而使无极弯扭用驱动机构3能进行弯曲与扭转操作,单无法进行拉伸与缩短操作。
[0071]
如图8及图9所示,编织合金网6为由多根形状记忆合金丝段61编织而成圆筒状网套结构,且由相交的四根形状记忆合金丝段61围成夹角可调的菱形网孔结构60,且两根相交的形状记忆合金丝段61在二者间通过节点连接件62进行导电连接,且相交的两根形状记忆合金丝段61在节点处由节点连接件62进行固连,而使该两根形状记忆合金丝段61在该节点处不会相对滑动,且相对节点连接件62也不会滑动,即在编织合金网套4上,两段相交的形状记忆合金丝61在该二者的相交处通过节点连接件62进行不可移动地固连。其中,形状记忆合金丝61为sma,即与公开号为cn111152244a的专利文献所公开的机器蛙人上的合金丝相同。
[0072]
连接环30用于与肩关节12、肘关节14或腕关节的关节驱动机构固连,例如与关节驱动电机的定子或转子连接,从而可以使臂主体相对与之通过关节驱动机构连接的部件之间的相对摆动。盘丝环33又通过螺钉与连接环30固连,从而编织合金网套4的两端间接地固连在连接环30上,即连接环30与盘丝环33一起构成本实施例中的外连环。
[0073]
为了驱使臂主体的扭转或完全动作,在本实施例中,臂动作驱动单元通过一端连接于节点连接件62上的导线,而对固设在该节点连接件62上的相交两根形状记忆合金丝61的交接点提供等电位的驱动电压;具体地,臂动作驱动单元为输出电压可调的稳压电源模块,且该稳压电源模块能够提供多个电位不同的电压输出。
[0074]
对不同节点施加不同电位电压的编织合金网6为臂主体的动作提供扭转驱动或完全驱动,从而通过与其他部件的配合而完成手臂的扭转操作。连接环30与肘部及肩部关节相连,其具体通过连接结构与刚性杆体31配合固连,使得其能够自由旋转的同时,也在一定程度上保证了两个连接环30之间的间距不变,即连接环30可转动地固连在刚性杆体31的两端端部上。
[0075]
柔性填充套筒32和柔性包裹套筒34既起到辅助固定编织合金网套4的功能,也可以配合编织合金网套的扭转实现无刚性冲击的手臂驱动,同时也对编织合金网套4起到一定的保护作用。柔性填充套筒32可以选用诸如乳胶等具有高弹性和低硬度的材料。
[0076]
将编织合金网套4平面展开得到如图9所示的展开图,形状记忆合金丝61的两端与
盘丝环33固接,其余记忆合金丝段通过节点连接件62互相连接,即在本实施例中,合金丝的两端部固连在节点连接件62上,构成网状,在节点连接件62的中心区域处连接有供电导线,用于给形状记忆合金丝段通电,即施加预定电位的电压。具体控制方式为通过人为控制节点连接件62上的电平高低控制位于两节点连接件62之间的形状记忆合金丝段上的电流,从而控制每一段合金丝的收缩与舒张;将每根合金丝的形变叠加,最终可以完成复杂弯曲或扭转动作。对每一段合金丝段61而言,只需控制其完全收缩和完全舒张两个状态,而不需要使其像在其他应用中一样,稳定在某个中间态以控制驱动位置,因此该方案对形状记忆合金的控制算法要求较低,即算法较为简单。
[0077]
如图10及图11所示,从局部来看,如图10为初始状态,其上下两边在手臂内衬的张力的作用下基本保持平行。对于扭转运动:当其中一段形状记忆合金丝61通电缩短之后,如图11所示,所围成菱形结构的边长发生了变化,在张力作用下,两根丝会产生侧向的位移,而作用到圆柱形臂主体上,该侧向位移出现在圆柱的侧面。叠加而成的位移将会使得臂主体有一个明显的扭转动作,从而驱使手掌进行扭转动作。
[0078]
如图12及图13所示,从局部来看,同时给两根形状记忆合金丝61通电收缩,如图13所示,由于菱形结构的横向两端点之间的间距不变,两边缩短,因此会在高度方向上产生伸缩运动。
[0079]
由上可知,同一层的所有节点采用相同的方式通电,就可以实现层与层之间的伸缩运动,而层与层之间的伸缩运动最终也会导致整只手臂的弯曲运动。
[0080]
如图14所示,黑色节点连接件62处设置为低电平,而白色节点连接件62设置为高电平,相当于向左倾斜的螺旋线上的形状记忆合金丝61都被通电驱动,而向右倾斜的螺旋线上的形状记忆合金丝61都维持原长。此时可以使上部的固定环产生顺时针方向的扭转,以此控制手腕的转动。利用该方案除了实现扭转外,还可以实现多种驱动方式,因此也不局限于应用在水下机器蛙人手臂结构中,还可以用于大腿臂或小腿臂上。
[0081]
如图15所示,隔行设置高低电平,即黑色节点连接件62处设置为低电平,而白色节点连接件62处设置为高电平,相当于所有的形状记忆合金丝61均被加热收缩,此时则可实现编织合金网的收缩运动;基于此,如果对合金网某一侧的连接件设置为黑白相间,而另一侧设置为全黑。此时,一侧的形状记忆合金丝61全都通电收缩,而另一侧形状记忆合金丝61均保持原长。则可以实现类似薄片型sma丝驱动器的效果,通过一侧长度缩短,另一侧保持原长的形式使合金网的向长度收缩一侧弯曲。
[0082]
与现有技术中传统的柔性臂不同的是,动作执行不依赖于多种驱动器的堆叠,不需要提前根据应用场合来设计不同功能驱动器的堆叠方案,例如拉伸或弯曲等的堆叠方案,适应能力强。采用微小形变叠加的形式实现整体驱动,对单段sma丝的控制要求低,整体控制难度低,控制精度高。
[0083]
此外,通过触点对sma丝构成的编织合金网进行分段控制,有效地简化控制方法;在整体上借鉴有限元思想,通过编织合金网的每一小段的sma丝的变化控制整体手臂动作。
[0084]
实施例3
[0085]
作为对本发明实施例3的说明,以下仅对与上述实施例2的不同之处进行说明。
[0086]
参照图7及图8所示结构,外连环上包括盘丝环33及固设在该盘丝环33的外侧面上的连接环30,关节驱动机构与连接环30固连,在盘丝环33上设有供形状记忆合金丝穿过而
进行编织的过丝孔330;编织合金网套4由单根形状记忆合金丝经编织而成,且连接环30紧压盘丝环33上,而对位于盘丝环33的外侧面上且位于两个过丝孔330之间的合金丝段部进行紧压固定,从而便于固定连接。
[0087]
在本实施例中,通过粘接剂等将节点连接件62固定连接在柔性填充套筒32上。
[0088]
实施例4
[0089]
作为对本发明实施例4的说明,以下仅对与上述实施例2的不同之处进行说明。
[0090]
参见图6,本发明提供的优选的方案为在形状记忆合金丝76外套装有柔性管壳91,及填充于柔性管壳91与形状记忆合金丝76之间的凝胶状混合物;其中,柔性管壳91采用乙烯-醋酸乙烯共聚物制成,而凝胶状混合物由硅油与硅脂按4:1的比例混合而成;并在柔性管壳91内布设有温度传感器92。
[0091]
由于sma的变形特性,其外壳的两端通常无法进行闭合,会导致其会暴露在海水中;而采用稳定的硅化合物可以应对海水的腐蚀,且其粘性能有效地确保驱动器在水中移动时填充物不会流出;此外,混合物的动态粘度约为130pa
·
s,使形状记忆合金丝可以快速收缩和恢复。
[0092]
在工作过程中,形状记忆合金丝76的牵引力来自温度引起的内部相变,其单向形状记忆效应sma可以在拉伸后通过相变而恢复其形状。本实施例中所使用的双向形状记忆效应形状记忆合金丝76经过反复训练,可以在两种长度之间自主切换,而形状记忆合金丝不会记忆除了长度以外的形状变化,且其马氏体相被训练到更长的长度,而奥氏体相被训练到更短的长度。这种训练最终使得形状记忆合金丝76能够加热收缩和冷却伸长。
[0093]
在安装过程中,将驱动过后的形状记忆合金丝76插入柔性管壳91中,插入的具体数量根据设计所需的最大驱动力决定,在使用注射器将混合物注入外壳内后,缓慢给形状记忆合金丝进行通电。
[0094]
在本实施例中的形状记忆合金丝74采用上述实施例中的形状记忆合金丝组件进行构建。并在连接端,将连接组件伸入到柔性管壳内而构建密封连接效果,并在两者为间隙套装的间隙内填充前述凝胶状混合物。