1.本实用新型涉及机械手臂技术领域,具体涉及一种基于蓝牙的近距离无线操控仿生机械手臂。
背景技术:
2.目前市场上只存在大型手术医疗机械臂,很少具备临床急救使用的小型机械臂。但是在医院里很可能出现同一时间多个病床发出急救信号,在护士短缺的情况下,我们可以把轻微的比如换药,缝针等工作交给小型机械臂;急救时,有可能因为护士站到病床的距离花费时间而错过黄金抢救时间,这时小型机械臂就可以及时做出基本的急救举措。因此,以上问题亟需解决。
技术实现要素:
3.本实用新型要解决的技术问题是提供一种基于蓝牙的近距离无线操控仿生机械手臂,采用仿生学技术,通过弯曲度传感器、单片机以及蓝牙的配合使用,使得机械手臂在人手的控制下能够实现机械手的张开闭合,从而精准的控制机械手做简单的缝针、打结、抓取等动作。
4.为解决上述技术问题,本实用新型采取如下技术方案:本实用新型的一种基于蓝牙的近距离无线操控仿生机械手臂,其创新点在于:包括后臂、中臂、前臂、第一驱动机构、第二驱动机构、舵机和机械手;所述后臂通过第一驱动机构与所述中臂的一端相连,并通过第一驱动机构带动所述中臂进行旋转;所述中臂的另一端通过第二驱动机构与所述前臂的一端相连,并通过第二驱动机构带动所述前臂进行旋转;在所述前臂的另一端还设有机械手,且在所述机械手上还设有舵机,并通过舵机来驱动所述机械手的手指进行伸缩动作。
5.优选的,所述第一驱动机构包括第一电机固定座、第一步进电机、第一安装架、第一皮带轮、第一中心十字连接件、第二皮带轮、第二安装架、第二步进电机和第二电机固定座;所述第一安装架和第二安装架结构相同,且均为由两个u形结构相背交叉设置,并整体成型而成,所述第一安装架的一侧u形槽设置方向与其另一侧u形槽设置方向相互垂直;在所述第一安装架的一侧u形槽内还嵌入设有第一电机固定座,且在所述第一电机固定座上还垂直设有第一步进电机;在所述第二安装架的一侧u形槽内还嵌入设有第二电机固定座,且在所述第二电机固定座上还垂直设有第二步进电机;所述第一安装架的另一侧u形槽与所述第二安装架的另一侧u型槽垂直交叉相对设置,且二者之间通过第一中心十字连接件联动连接;所述第一中心十字连接件的一相对两端分别通过轴承与所述第一安装架的另一侧u型槽两端转动连接,且其一端垂直延伸出所述第一安装架,并通过第一皮带轮与所述第一步进电机的输出端联动连接,带动第二安装架绕第一中心十字连接件进行转动;所述第一中心十字连接件的另一相对两端分别通过轴承与所述第二安装架的另一侧u型槽两端转动连接,且其一端垂直延伸出所述第二安装架,并通过第二皮带轮与所述第二步进电机的输出端联动连接,带动第二安装架绕第一中心十字连接件进行转动。
6.优选的,所述第一步进电机的输出端设置方向与所述第二步进电机的输出端设置方向相互垂直。
7.优选的,所述第一电机固定座相对于第一安装架开口端的一侧面与所述后臂螺接固定,且所述第二电机固定架相对于第二安装架开口端的一侧面与所述中臂的一端螺接固定;在第一步进电机和第二步进电机的驱动下,所述中臂绕第一中心十字连接件进行旋转。
8.优选的,所述第二驱动机构的结构与所述第一驱动机构的结构相同,且其包括第三电机固定座、第三步进电机、第三安装架、第三皮带轮、第二中心十字连接件、第四皮带轮、第四安装架、第四步进电机和第四电机固定座;所述第三安装架和第四安装架结构相同,且均为由两个u形结构相背交叉设置,并整体成型而成,所述第三安装架的一侧u形槽设置方向与其另一侧u形槽设置方向相互垂直;在所述第三安装架的一侧u形槽内还嵌入设有第三电机固定座,且在所述第三电机固定座上还垂直设有第三步进电机;在所述第四安装架的一侧u形槽内还嵌入设有第四电机固定座,且在所述第四电机固定座上还垂直设有第四步进电机;所述第三安装架的另一侧u形槽与所述第四安装架的另一侧u型槽垂直交叉相对设置,且二者之间通过第二中心十字连接件联动连接;所述第二中心十字连接件的一相对两端分别通过轴承与所述第三安装架的另一侧u型槽两端转动连接,且其一端垂直延伸出所述第三安装架,并通过第三皮带轮与所述第三步进电机的输出端联动连接,带动第四安装架绕第二中心十字连接件进行转动;所述第二中心十字连接件的另一相对两端分别通过轴承与所述第四安装架的另一侧u型槽两端转动连接,且其一端垂直延伸出所述第四安装架,并通过第四皮带轮与所述第四步进电机的输出端联动连接,带动第四安装架绕第二中心十字连接件进行转动。
9.优选的,所述第三步进电机的输出端设置方向与所述第四步进电机的输出端设置方向相互垂直。
10.优选的,所述第三电机固定座相对于第三安装架开口端的一侧面与所述中臂的另一端螺接固定,且所述第四电机固定架相对于第四安装架开口端的一侧面与所述前臂的一端螺接固定;在第三步进电机和第四步进电机的驱动下,所述前臂绕第二中心十字连接件进行旋转。
11.优选的,还包括牵引线;在所述机械手上还设有牵引线,且所述舵机通牵引线与机械手的手指联动,并控制机械手手指的伸缩动作。
12.优选的,还包括弯曲度传感器、单片机和蓝牙;在人手的手套上还设有弯曲度传感器,且在所述前臂上还设有单片机,所述单片机分别与所述第一步进电机、第二步进电机、第三步进电机、第四步进电机以及舵机电性连接;所述弯曲度传感器测量人手手指的弯曲程度,将模拟信号通过蓝牙传输至单片机,再通过单片机控制机械手的伸缩动作。
13.优选的,所述单片机采用arduinouno单片机;所述弯曲度传感器采用的型号为flex sensor系列的4.5传感器;所述蓝牙采用bt08b蓝牙串口模块。
14.本实用新型的有益效果:
15.(1)本实用新型采用仿生学技术,通过弯曲度传感器、单片机以及蓝牙的配合使用,使得机械手臂在人手的控制下能够实现机械手的张开闭合,从而精准的控制机械手做简单的缝针、打结、抓取等动作;
16.(2)本实用新型采用中心十字连接件,通过步进电机与皮带轮的配合使用,提高了
机械手臂的自由度,从而增加了机械手臂的适用范围。
附图说明
17.为了更清晰地说明本实用新型实施例中的技术方案,下面将对实施例中所需要使用的附图简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型中记载的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
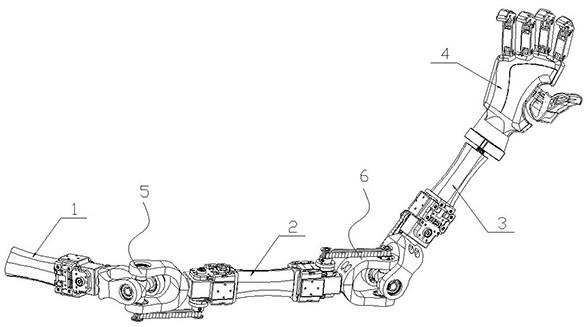
18.图1为本实用新型一种基于蓝牙的近距离无线操控仿生机械手臂的结构示意图。
19.图2为图1中第一驱动机构的结构示意图。
20.图3为图2中第一安装架的结构示意图。
21.图4为图2中第一中心十字连接件的结构示意图。
22.图5为图1中机械手部分的结构示意图。
23.其中,1-后臂;2-中臂;3-前臂;4-机械手;5-第一驱动机构;6-第二驱动机构;7-舵机;8-牵引线;51-第一电机固定座;52-第一步进电机;53-第一安装架;54-第一皮带轮;55-第一中心十字连接件;56-第二皮带轮;57-第二安装架;58-第二步进电机;59-第二电机固定座。
具体实施方式
24.下面将通过具体实施方式对本实用新型的技术方案进行清楚、完整地描述。
25.本实用新型的一种基于蓝牙的近距离无线操控仿生机械手臂,包括后臂1、中臂2、前臂3、第一驱动机构5、第二驱动机构6、舵机7和机械手4;具体结构示意图1所示,后臂1通过第一驱动机构5与中臂2的一端相连,并通过第一驱动机构5带动中臂2进行旋转;
26.其中,第一驱动机构5包括第一电机固定座51、第一步进电机52、第一安装架53、第一皮带轮54、第一中心十字连接件55、第二皮带轮56、第二安装架57、第二步进电机58和第二电机固定座59;如图1~4所示,第一安装架53和第二安装架57结构相同,且均为由两个u形结构相背交叉设置,并整体成型而成,第一安装架53的一侧u形槽设置方向与其另一侧u形槽设置方向相互垂直;在第一安装架53的一侧u形槽内还嵌入设有第一电机固定座51,且在第一电机固定座51上还垂直设有第一步进电机52;在第二安装架57的一侧u形槽内还嵌入设有第二电机固定座59,且在第二电机固定座59上还垂直设有第二步进电机58;
27.如图1~4所示,第一安装架53的另一侧u形槽与第二安装架57的另一侧u型槽垂直交叉相对设置,且二者之间通过第一中心十字连接件55联动连接;第一中心十字连接件55的一相对两端分别通过轴承与第一安装架53的另一侧u型槽两端转动连接,且其一端垂直延伸出第一安装架53,并通过第一皮带轮54与第一步进电机52的输出端联动连接,带动第二安装架57绕第一中心十字连接件55进行转动;第一中心十字连接件55的另一相对两端分别通过轴承与第二安装架57的另一侧u型槽两端转动连接,且其一端垂直延伸出第二安装架57,并通过第二皮带轮56与二步进电机的输出端联动连接,带动第二安装架57绕第一中心十字连接件55进行转动;其中,第一步进电机52的输出端设置方向与第二步进电机58的输出端设置方向相互垂直。本实用新型中第一电机固定座51相对于第一安装架53开口端的一侧面与后臂1螺接固定,且第二电机固定架相对于第二安装架57开口端的一侧面与中臂2
的一端螺接固定;在第一步进电机52和第二步进电机58的驱动下,中臂2绕第一中心十字连接件55进行旋转。
28.本实用新型中臂2的另一端通过第二驱动机构6与前臂3的一端相连,并通过第二驱动机构6带动前臂3进行旋转;其中,第二驱动机构6的结构与第一驱动机构5的结构相同,故并未单独给出第二驱动机构6部分的附图,在此可参考第一驱动机构5的附图;第二驱动机构6包括第三电机固定座、第三步进电机、第三安装架、第三皮带轮、第二中心十字连接件、第四皮带轮、第四安装架、第四步进电机和第四电机固定座;如图1~4所示,第三安装架和第四安装架结构相同,且均为由两个u形结构相背交叉设置,并整体成型而成,第三安装架的一侧u形槽设置方向与其另一侧u形槽设置方向相互垂直;在第三安装架的一侧u形槽内还嵌入设有第三电机固定座,且在第三电机固定座上还垂直设有第三步进电机;在第四安装架的一侧u形槽内还嵌入设有第四电机固定座,且在第四电机固定座上还垂直设有第四步进电机;
29.如图1~4所示,第三安装架的另一侧u形槽与第四安装架的另一侧u型槽垂直交叉相对设置,且二者之间通过第二中心十字连接件联动连接;第二中心十字连接件的一相对两端分别通过轴承与第三安装架的另一侧u型槽两端转动连接,且其一端垂直延伸出第三安装架,并通过第三皮带轮与第三步进电机的输出端联动连接,带动第四安装架绕第二中心十字连接件进行转动;第二中心十字连接件的另一相对两端分别通过轴承与第四安装架的另一侧u型槽两端转动连接,且其一端垂直延伸出第四安装架,并通过第四皮带轮与第四步进电机的输出端联动连接,带动第四安装架绕第二中心十字连接件进行转动。其中,第三步进电机的输出端设置方向与第四步进电机的输出端设置方向相互垂直。本实用新型中第三电机固定座相对于第三安装架开口端的一侧面与中臂2的另一端螺接固定,且第四电机固定架相对于第四安装架开口端的一侧面与前臂3的一端螺接固定;在第三步进电机和第四步进电机的驱动下,前臂3绕第二中心十字连接件进行旋转。
30.本实用新型在前臂3的另一端还设有机械手4,且在机械手4上还设有舵机7,并通过舵机7来驱动机械手4的手指进行伸缩动作。如图1、图5所示,在机械手4上还设有牵引线8,且舵机7通牵引线8与机械手4的手指联动,并控制机械手4手指的伸缩动作。
31.如图1所示,在人手的手套上还设有弯曲度传感器,且在前臂3上还设有单片机,该单片机分别与第一步进电机52、第二步进电机58、第三步进电机、第四步进电机以及舵机7电性连接;本实用新型中弯曲度传感器测量人手手指的弯曲程度,将模拟信号通过蓝牙传输至单片机,再通过单片机控制机械手4的伸缩动作。其中,单片机采用arduinouno单片机;弯曲度传感器采用的型号为flex sensor系列的4.5传感器;蓝牙采用bt08b蓝牙串口模块;在机械手4上还设有摄像头,从而便于近距离清晰看到操作部位。
32.本实用新型的工作原理:首先弯曲度传感器测量人手手指的弯曲程度,将模拟信号通过蓝牙传输至单片机,然后单片机再将弯曲度数值放大进行计算转换成步进电机的旋转数值以及舵机7的旋转数值,从而近距离操控机械手4进行旋转以及机械手4的手指进行伸缩。
33.本实用新型的有益效果:
34.(1)本实用新型采用仿生学技术,通过弯曲度传感器、单片机以及蓝牙的配合使用,使得机械手臂在人手的控制下能够实现机械手4的张开闭合,从而精准的控制机械手4
做简单的缝针、打结、抓取等动作;
35.(2)本实用新型采用中心十字连接件,通过步进电机与皮带轮的配合使用,提高了机械手臂的自由度,从而增加了机械手臂的适用范围。
36.上面所述的实施例仅仅是本实用新型的优选实施方式进行描述,并非对本实用新型的构思和范围进行限定,在不脱离本实用新型设计构思的前提下,本领域中普通工程技术人员对本实用新型的技术方案作出的各种变型和改进均应落入本实用新型的保护范围,本实用新型的请求保护的技术内容,已经全部记载在技术要求书中。