一种基于3d视觉引导的机器人抓取机构
技术领域
1.本实用新型涉及智能抓取装置技术领域,具体为一种基于3d视觉引导的机器人抓取机构。
背景技术:
2.视觉系统是一种利用机器代替人眼进行测量、判断和操作的计算机软硬件等方面的技术,视觉系统也是计算科中的一个分支,通过工业机器人视觉系统能够减少工业中的人力消耗,且快速有效,出错率更低,而机械臂则是其中的一种,能够通过机械臂代替工业中的人进行分拣,提高生产效率。
3.传统的抓取装置在机械臂的作用下,只能够进行上下、左右和前后移动,时候抓取摆放整齐的物体,当物体倾斜摆放时,抓取装置不能够自身旋转进行抓取角度调节,就会导致在抓取材料时出现失误,影响抓取效果,降低生产效率。
技术实现要素:
4.本实用新型的目的在于提供一种基于3d视觉引导的机器人抓取机构,具备的抓取装置自身能够旋转进行抓取角度调节,适合抓取不同状态的材料,提高抓取效率优点,解决了背景技术中提到的问题。
5.为实现上述目的,本实用新型提供如下技术方案:一种基于3d视觉引导的机器人抓取机构,包括安装架和大轴套,所述安装架一端中间安装有圆套,所述大轴套通过轴承套装在圆套上,大轴套上下端安装有固定柱,上下固定柱内滑动安装有夹臂,两个夹臂中间位置安装有圆销,上端夹臂上的圆销安装在正面,下端夹臂上的圆销安装在反面,所述安装架内安装有电动伸缩杆,电动伸缩杆伸缩柱贯穿安装架从圆套内穿过,且电动伸缩杆伸缩柱端头转动安装有小轴套,小轴套上下端也对称安装有圆销,小轴套上端的圆销安装在正面,小轴套下端的圆销安装在反面,且小轴套上下端安装的圆销与两个夹臂上安装的圆销之间活动安装有连杆。
6.优选的,所述大轴套位于安装架一面焊接有齿轮a。
7.优选的,所述安装架上端安装有小型电机,小型电机输出轴上安装有齿轮b,且齿轮b与齿轮a啮合连接。
8.优选的,所述安装架上面中间安装有固定杆,固定杆上固定有ccd相机。
9.优选的,两个所述夹臂夹持端插入安装有夹持头,两个夹持头通过固定螺丝固定在两个夹臂上。
10.与现有技术相比,本实用新型的有益效果如下:
11.1、本实用新型通过启动电动伸缩杆,电动伸缩杆工作伸出带动小轴套向右移动,小轴套带动两个连杆向右移动,从而带动两个夹臂顺着固定柱相向移动,使相互靠近的两个夹持头将物体夹紧,然后移动到抓取物体放置点,电动伸缩杆工作缩回使两个夹持头分离,将抓取物体放下,从而实现对物体的转移工作。
12.2、本实用新型通过启动小型电机,小型电机工作带动其输出轴上安装的齿轮b转动,齿轮b转动带动与其啮合连接的齿轮a转动,齿轮a带动大轴套转动,小轴套配合转动,从而实现带动两个夹臂上安装的夹持头进行抓取角度的调节,提高抓取效率。
附图说明
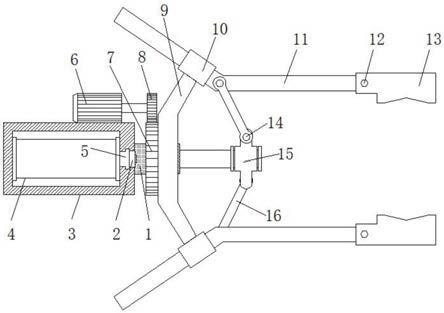
13.图1为本实用新型结构示意图;
14.图2为本实用新型抓取状态示意图。
15.图中:1、圆套;2、ccd相机;3、安装架;4、电动伸缩杆;5、固定杆;6、小型电机;7、齿轮a;8、齿轮b;9、大轴套;10、固定柱;11、夹臂;12、固定螺丝;13、夹持头;14、圆销;15、小轴套;16、连杆。
具体实施方式
16.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
17.请参阅图1至图2,本实用新型提供一种基于3d视觉引导的机器人抓取机构技术方案:一种基于3d视觉引导的机器人抓取机构,包括安装架3和大轴套9,安装架3一端中间安装有圆套1,大轴套9通过轴承套装在圆套1上,大轴套9位于安装架3一面焊接有齿轮a7,大轴套9上下端安装有固定柱10,上下固定柱10内滑动安装有夹臂11,两个夹臂11夹持端插入安装有夹持头13,两个夹持头13通过固定螺丝12固定在两个夹臂11上;两个夹持头13通过固定螺丝12固定在两个夹臂11上,当夹持头13出现磨损影响抓取效果时,只需拧出固定螺丝12,将磨损的夹持头13跟换掉即可,非常方便。两个夹臂11中间位置安装有圆销14,上端夹臂11上的圆销14安装在正面,下端夹臂11上的圆销14安装在反面,安装架3内安装有电动伸缩杆4,电动伸缩杆4伸缩柱贯穿安装架3从圆套1内穿过,且电动伸缩杆4伸缩柱端头转动安装有小轴套15,小轴套15上下端也对称安装有圆销14,小轴套15上端的圆销14安装在正面,小轴套15下端的圆销14安装在反面,且小轴套15上下端安装的圆销14与两个夹臂11上安装的圆销14之间活动安装有连杆16;启动电动伸缩杆4,电动伸缩杆4工作伸出带动小轴套15向右移动,小轴套15带动两个连杆16向右移动,从而带动两个夹臂11顺着固定柱10相向移动,使相互靠近的两个夹持头13将物体夹紧,然后移动到抓取物体放置点,电动伸缩杆4工作缩回使两个夹持头13分离,将抓取物体放下。
18.安装架3上端安装有小型电机6,小型电机6输出轴上安装有齿轮b8,且齿轮b8与齿轮a7啮合连接,安装架3上面中间安装有固定杆5,固定杆5上固定有ccd相机2;启动小型电机6,小型电机6工作带动其输出轴上安装的齿轮b8转动,齿轮b8转动带动与其啮合连接的齿轮a7转动,齿轮a7带动大轴套9转动,小轴套15配合转动,从而带动两个夹臂11上安装的夹持头13进行抓取角度调节。
19.本实用新型电机选用小型伺服电机
‑‑
14hs2408型号进行设计,该型号马达仅仅作为所属技术领域人员进行参考选用,所属技术领域人员可根据实际生产需要进行选配相同参数和功能的马达进行安装调试使用,本实用新型不进行赘述。
20.工作原理:本实用新型使用时,需将抓取装置安装在机械臂上,通过机械臂上下、左右和前后移动将抓取装置移动到抓取点,通过ccd相机2确定好抓取物体的位置,启动电动伸缩杆4,电动伸缩杆4工作伸出带动小轴套15向右移动,小轴套15带动两个连杆16向右移动,从而带动两个夹臂11顺着固定柱10相向移动,使相互靠近的两个夹持头13将物体夹紧,然后移动到抓取物体放置点,电动伸缩杆4工作缩回使两个夹持头13分离,将抓取物体放下,当通过ccd相机2确认抓取物体倾斜时,可启动小型电机6,小型电机6工作带动其输出轴上安装的齿轮b8转动,齿轮b8转动带动与其啮合连接的齿轮a7转动,齿轮a7带动大轴套9转动,小轴套15配合转动,从而带动两个夹臂11上安装的夹持头13调整到合适的角度,然后重复上述动作进行抓取。
21.尽管已经示出和描述了本实用新型的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本实用新型的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本实用新型的范围由所附权利要求及其等同物限定。
技术特征:
1.一种基于3d视觉引导的机器人抓取机构,包括安装架(3)和大轴套(9),其特征在于:所述安装架(3)一端中间安装有圆套(1),所述大轴套(9)通过轴承套装在圆套(1)上,大轴套(9)上下端安装有固定柱(10),上下固定柱(10)内滑动安装有夹臂(11),两个夹臂(11)中间位置安装有圆销(14),上端夹臂(11)上的圆销(14)安装在正面,下端夹臂(11)上的圆销(14)安装在反面,所述安装架(3)内安装有电动伸缩杆(4),电动伸缩杆(4)伸缩柱贯穿安装架(3)从圆套(1)内穿过,且电动伸缩杆(4)伸缩柱端头转动安装有小轴套(15),小轴套(15)上下端也对称安装有圆销(14),小轴套(15)上端的圆销(14)安装在正面,小轴套(15)下端的圆销(14)安装在反面,且小轴套(15)上下端安装的圆销(14)与两个夹臂(11)上安装的圆销(14)之间活动安装有连杆(16)。2.根据权利要求1所述的一种基于3d视觉引导的机器人抓取机构,其特征在于:所述大轴套(9)位于安装架(3)一面焊接有齿轮a(7)。3.根据权利要求1所述的一种基于3d视觉引导的机器人抓取机构,其特征在于:所述安装架(3)上端安装有小型电机(6),小型电机(6)输出轴上安装有齿轮b(8),且齿轮b(8)与齿轮a(7)啮合连接。4.根据权利要求1所述的一种基于3d视觉引导的机器人抓取机构,其特征在于:所述安装架(3)上面中间安装有固定杆(5),固定杆(5)上固定有ccd相机(2)。5.根据权利要求1所述的一种基于3d视觉引导的机器人抓取机构,其特征在于:两个所述夹臂(11)夹持端插入安装有夹持头(13),两个夹持头(13)通过固定螺丝(12)固定在两个夹臂(11)上。
技术总结
本实用新型公开了一种基于3D视觉引导的机器人抓取机构,包括安装架和大轴套,所述安装架一端中间安装有圆套,所述大轴套通过轴承套装在圆套上,大轴套上下端安装有固定柱,上下固定柱内滑动安装有夹臂,两个夹臂中间位置安装有圆销,上端夹臂上的圆销安装在正面,下端夹臂上的圆销安装在反面,所述安装架内安装有电动伸缩杆,电动伸缩杆伸缩柱贯穿安装架从圆套内穿过,且电动伸缩杆伸缩柱端头转动安装有小轴套,小轴套上端的圆销安装在正面,小轴套下端的圆销安装在反面,且小轴套上下端安装的圆销与两个夹臂上安装的圆销之间活动安装有连杆。本实用新型实现抓取装置自身能够旋转进行抓取角度调节,适合抓取不同状态的材料,提高抓取效率。提高抓取效率。提高抓取效率。
技术研发人员:胡竟新 毕照
受保护的技术使用者:武汉华诺三维智能科技有限公司
技术研发日:2021.09.29
技术公布日:2022/2/11