1.本技术提出一种五轴机械臂,具体涉及物料搬运技术领域。
背景技术:
2.现有用于机床物料运送的桁架大多架设在加工设备上方,桁架通常需要支撑在两边的立柱来承载整个桁架的重量,桁架的横梁长时间使用容易变形甚至弯曲,由于运转的空间限制,桁架的工作臂运行存在工作空间受桁架工作臂长度限制、工作半径同样受限、不能完成大跨度空间作业等缺陷。有鉴于此,许多生产企业推出了桁架式机械手,以代替人工开展上下料工作,并且这些劳动强度大危险系数高的运输工作,是自动生产线上物料运输的重要组成设备。
3.目前桁架机械手构造一般包括立柱、横梁、机械臂和末端执行器等。当物料需要运送的距离相对较长,或者,当要把物料从较高处运送到较低处时,桁架机械臂就难以实现,不能适应处在不同高度物料的运送要求,往往需要人工进行搬运。另外,现有桁架机械臂也无法满足多台机床的物料运送的需要,导致工作效率低下。
技术实现要素:
4.针对现有桁架式机械手存在不能适应处在不同高度物料的运送要求,特提出本技术的一种五轴机械臂,具有旋转基座、横梁臂、伸缩臂、垂直升降臂和执行关节,其特征在于,所述的旋转基座具有旋转关节,旋转关节具有的输出轴固定连接横梁臂;所述横梁臂上设置有滑动装置,所述垂直升降臂固定安装有执行关节,执行关节连接有腕关节一,腕关节一连接腕关节二,腕关节二安装有夹爪一和夹爪二,夹爪二的中心线与夹爪一的中心线相互垂直,夹爪一的中心线与垂直升降臂的中心线共线/或平行。
5.优选地,所述滑动装置与伸缩臂之间设置有螺母支架,横梁臂安装有动力装置一,动力装置一连接丝杆,丝杆匹配在螺母支架内部;所述伸缩臂设置有动力装置二,动力装置二驱动齿轮,齿轮匹配垂直升降臂具有的升降齿条;所述垂直升降臂固定安装有执行关节,执行关节连接有腕关节一,腕关节一连接腕关节二,腕关节二安装有夹爪一和夹爪二,夹爪二的中心线与夹爪一的中心线相互垂直,夹爪一的中心线与垂直升降臂的中心线共线/或平行。
6.优选地,所述输出轴固定在横梁臂后端,所述旋转基座安装在机械臂具有的基座本体上。
7.优选地,所述螺母支架和丝杆位于伸缩臂的内部,所述滑动装置与伸缩臂具有的前后移送导轨相匹配,所述动力装置一安装在横梁臂的后端。
8.优选地,所述动力装置二输出轴为传动杆连接齿轮,动力装置二设置在伸缩臂的后端。
9.优选地,所述齿轮和升降齿条设置在伸缩臂前端具有的升降定位支架内部,升降齿条固定在垂直升降臂具有的升降导轨上。
10.优选地,所述夹爪一与夹爪二之间的夹角为90
°
,所述腕关节二上安装的夹爪一和夹爪二为物料运送执行端。
11.优选地,所述动力装置二和动力装置一优选为伺服电机。
12.优选地,所述横梁臂具有立柱、前拉杆和后拉杆,立柱垂直设置在前后移送导轨上,前拉杆一端连接立柱的顶部,另一端固定在前后移送导轨的前端;后拉杆一端连接立柱的顶部,另一端固定在前后移送导轨的后端。
13.优选地,所述伸缩臂具有立杆、前平衡杆和后平衡杆,立杆垂直设置在伸缩臂上,前平衡杆一端连接立杆的顶部,另一端固定在伸缩臂的前端;后平衡杆一端连接立杆的顶部,另一端固定在伸缩臂的后端。
14.本技术提出一种五轴机械臂,通过使用动力装置二、旋转关节和动力装置一来控制物料运送五轴机械臂的运转,实现旋转基座、横梁臂、伸缩臂、垂直升降臂和执行关节在不同的时间段执行各自的旋转移动、前后移送或升降移送动作,满足机床加工时处于不同高度物料的运送需要,并且本技术的动力装置二、旋转关节和动力装置一优选为伺服电机,进一步提高机械臂的控制精度。本技术的物料运送五轴机械臂一是有效解决了现有物料运送桁架机械臂存在运转范围受制约的问题,二是提供了较低价位且制造相对简单的物料运送机械臂,在机械臂行业具有较大的发展空间。
附图说明
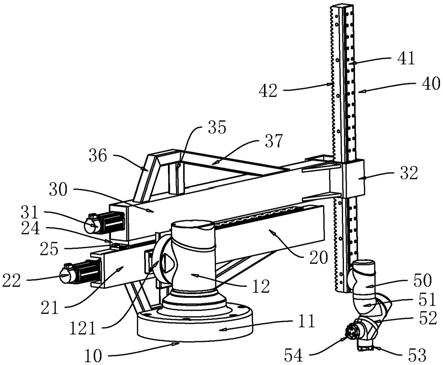
15.图1是本技术一种五轴机械臂的正视图;
16.图2是本技术一种五轴机械臂后视构造图;
17.图3是本技术一种五轴机械臂齿轮和升降齿条配合图。
18.附图标记:旋转基座10、基座本体11、旋转关节12、输出轴121、横梁臂20、前后移送导轨21、动力装置一22、丝杆23、螺母支架24、滑动装置25、立柱26、前拉杆27、后拉杆28、伸缩臂30、动力装置二31、升降定位支架32、传动杆33、齿轮34、立杆35、前平衡杆36、后平衡杆37、垂直升降臂40、升降导轨41、升降齿条42、执行关节50、腕关节一51、腕关节二52、夹爪一53、夹爪二54。
具体实施方式
19.下面结合附图1-3对本技术的优选实施例进行详细阐述,以使本技术的优点和特征能更易于被本领域技术人员理解,从而对本技术的保护范围做出更为清楚明确的界定,这些实施方式仅用于说明本发明,而并非对本发明的限制。
20.本技术提出一种五轴机械臂,用于物料运送,尤其应用于机床加工时处于不同高度物料之间的运送,同时造价相对较低的机械臂。物料运送五轴机械臂具有旋转基座10、横梁臂20、伸缩臂30、垂直升降臂40和执行关节50五轴,旋转基座10、横梁臂20、伸缩臂30、垂直升降臂40和执行关节50在不同的时间段执行各自的旋转或者前后或者升降动作。
21.上述旋转基座10具有基座本体11和旋转关节12,旋转关节12安装在基座本体11上,旋转关节12具有的输出轴121固定横梁臂20,输出轴121固定在横梁臂20后端。旋转关节12的输出轴121驱动横梁臂20连同伸缩臂30、垂直升降臂40和执行关节50等一起作出旋转移动,实现机械臂的运转。
22.上述横梁臂20上安装固定有伸缩臂30。具体为,横梁臂20具有的前后移送导轨21上安装有螺母支架24,伸缩臂30固定在螺母支架24上,螺母支架24与横梁臂20(前后移送导轨21)之间设置有滑动装置25,横梁臂20后端上安装的动力装置一22驱动丝杆23旋转推动螺母支架24从而实现伸缩臂30连同垂直升降臂40和执行关节50一起前后水平移动。上述丝杆23匹配在螺母支架24内部,螺母支架24和丝杆23位于伸缩臂30的内部,滑动装置25与前后移送导轨21相匹配。
23.上述伸缩臂30的前端设置有升降定位支架32,升降定位支架32内部设置有垂直升降臂40,垂直升降臂40具有升降齿条42和升降导轨41,升降导轨41固定有升降齿条42。伸缩臂30后端设置有动力装置二31,动力装置二31驱动齿轮34,动力装置二31输出轴为传动杆33,传动杆33连接齿轮34。升降齿条42与齿轮34匹配安装在升降定位支架32内部并运行在升降定位支架32内部。动力装置二31通过传动杆33及齿轮34带动升降齿条42升降运行,实现动力装置二31带动垂直升降臂40连同下端安装的执行关节50一起作出升降动作,从而满足机械臂运送高度相差较大的物料要求。
24.上述的执行关节50安装固定在垂直升降臂40的升降导轨41或者升降齿条42上,执行关节50与垂直升降臂40一样呈垂直向下状态。上述执行关节50连接腕关节一51,腕关节一51连接腕关节二52,腕关节二52安装有夹爪一53和夹爪二54。上述夹爪一53呈直线零位状态,所述夹爪一53的中心线与垂直升降臂40的中心线共线/或者平行,所述夹爪二54的中心线与夹爪一53的中心线相互垂直。在本方案中,夹爪一53与夹爪二54之间的夹角为90
°
,值得提出的是,夹爪一53与夹爪二54之间的夹角可以灵活设置,只要达到夹爪一53的中心线呈直线零位状态与垂直升降臂40的中心线共线或者平行即可。安装在腕关节二52的夹爪一53和夹爪二54为物料运送执行端。
25.上述的动力装置二31、旋转关节12和动力装置一22优选为伺服电机。
26.机械臂的横梁臂20具有立柱26、前拉杆27和后拉杆28,立柱26垂直设置在前后移送导轨21上,前拉杆27一端连接立柱26的顶部,另一端固定在前后移送导轨21的前端;后拉杆28一端连接立柱26的顶部,另一端固定在前后移送导轨21的后端,立柱26、前拉杆27和后拉杆28的设置使得前后移送导轨21钢性得以提高,使得整体的机械臂在运转时结构更加符合力学原理,使得机械臂运转的稳定性得以提高。
27.本技术的伸缩臂30具有立杆35、前平衡杆36和后平衡杆37,立杆35垂直设置在伸缩臂30上,前平衡杆36一端连接立杆35的顶部,另一端固定在伸缩臂30的前端;后平衡杆37一端连接立杆35的顶部,另一端固定在伸缩臂30的后端,立杆35、前平衡杆36和后平衡杆37的设置使得伸缩臂30钢性得以加强,使得整体的机械臂在运转时结构更加符合力学原理,使得机械臂运转的稳定性得以提高。
28.以上所述仅为本技术的优选实施方式,并非因此限制本技术的专利范围,凡是利用本技术说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其它相关的技术领域,均同理包括在本技术的专利保护范围内。