液压机械切割器
背景技术:
1.越来越多的食品在到达消费者的盘子之前被加工。例如,各种水果和蔬菜被切割或成形,然后冷冻或以其他方式保存以备后续使用。为了满足对加工食品的需求并有效地大量生产此类产品,食物行业利用各种设备对大量食物进行快速加工。
附图说明
2.具体实施方式参照附图进行描述。
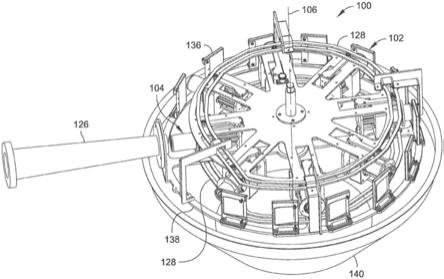
3.图1是根据本公开的示例性实施例的食品切割系统的等距视图,所述食品切割系统包括带有多个食物切割器的旋转食品承载器、和相对于食物切割器的行进方向设置在大致切向方位上设置的多个固定的切片刀。
4.图2是图1示出的食品切割系统的局部俯视图,其中为了清楚,已移除了各种部件。
5.图3是图1示出的食品切割系统的局部透视图,其中食品切割系统被示出为处于初始装载位置以用于在第一食物切割器处接纳食品,并且其中第二食物切割器已经移动经过了第一切片刀以形成食品的第一切片。
6.图4是图1中示出的食品切割系统的侧视图。
7.图5是根据本公开的示例性实施例的食物切割器的等距视图,所述食物切割器包括用于食品切割系统的堆叠的环形刀和推顶板,其中凸轮被示出为处于完全缩回方位,其中所述食品切割系统例如是图1中所示的食品切割系统。
8.图6是在图5中示出的食物切割器的另一个等距视图,其中凸轮被示出为在食物切割器中伸出。
9.图7是在图5中示出的食物切割器的又一个等距视图,其中凸轮被示出为处于完全伸出的方位。
10.图8是在图5中示出的食物切割器的分解透视图。
11.图9是用于根据本公开的示例性实施例的食物切割器的刀焊接件的端视图,所述食物切割器例如为图5所示的食物切割器。
12.图10是在图9中示出的刀焊接件的侧视图。
13.图11是在图9中示出的刀焊接件的等距视图。
14.图12是用于食品切割系统的、包括螺旋形刀和推顶板(以虚线示出)的另一食物切割器的等距视图,所述食品切割系统例如是图1所示出的食品切割系统。
15.图13是在图12中示出的食物切割器的另一等距视图,其中螺旋形刀以虚线示出。
16.图14是根据本公开的示例性实施例的、示出食品(马铃薯)在通过食品切割系统使用具有堆叠的环形刀的食物切割器在第一方向(沿马铃薯的纵向轴线)上经过第一切割操作之后的等距视图,其中所述食品切割系统例如是图1所示出的食品切割系统,所述食物切割器例如是图5所示出的食物切割器。
17.图15是根据本公开的示例性实施例的示出图14中的食品在第二方向(例如,垂直于马铃薯的纵向轴线)上经过多次第二切割操作之后的等距视图。
18.图16是在图15中示出的食品的端视图。
19.图17是在图15中示出的食品的侧视图。
20.图18是根据本公开的示例性实施例的在由食品切割系统进行第一和第二切割操作之后的多块食品的等距视图,其中所述食品切割系统例如是图1所示出的食品切割系统。
21.图19是示出了食品(马铃薯)在通过食品切割系统使用具有螺旋形刀的食物切割器在第一方向上(沿马铃薯的纵向轴线)经过第一切割操作之后的等距视图,其中所述食品切割系统例如是图1所示出的食品切割系统,所述食物切割器例如是图12所示出的食物切割器。
22.图20是根据本公开的示例性实施例的示出的图19的食品在第二方向(例如,垂直于马铃薯的纵向轴线)上经过多次第二切割操作之后的等距视图。
23.图21是在图20中示出的食品的端视图。
24.图22是在图20中示出的食品的侧视图。
25.图23是根据本公开的示例性实施例的在由食品切割系统经过的第一切割操作和第二切割操作之后的一块食品的等距视图,所述食品切割系统例如是图1所示出的食品切割系统。
26.图24是根据本公开的示例性实施例的示出图19中的食品在第二方向(例如,垂直于马铃薯的纵向轴线)上经过多次第二切割操作之后的等距视图。
27.图25是在图24中示出的食品的端视图。
28.图26是在图24中示出的食品的侧视图。
29.图27是根据本公开的示例性实施例的、在由食品切割系统经过的第一切割操作和第二切割操作之后的一块食品的等距视图,其中所述食品切割系统例如是图1所示出的食品切割系统。
具体实施例
30.在下文中将参照附图更全面地描述本公开的方面,其中所述附图形成本公开的一部分,并且通过图示的方式显示示例性特征。然而,这些特征可以通过很多不同的形式被实施,并且不应被解释为限于本文所阐述的组合;相反,提供这些组合,以使本公开全面和完整,并且这些组合将充分表达范围。其中,本公开的特征可以被实施为配方、食品、工艺、制造食品的工艺和制造配方的工艺。因此,以下详细描述不应被视为限制意义。
31.总体参考图1至图27,描述了液压机械食品切割系统100。食品切割系统100可以包括用于承载食品200的食品承载器102,其中食品承载器102包括用于切割食品200的一个或多个食物切割器104。用于切割的示例性食品200可以包括但不必限于蔬菜,如马铃薯。然而,本文的公开应该被理解为包括所有蔬菜且不应该被限于马铃薯。其他蔬菜的的一些示例包括红薯、山药、甜菜和胡萝卜。此外,术语“蔬菜”应该理解为包括果肉密度适合用切割器或刀切割的水果。例如,苹果、梨和菠萝是可以通过切割器或刀切割和/或加工的几种水果。在一些实施例中,蔬菜可以被冷藏、加热和/或以其他方式经受一个或多个预处理步骤,以提供合适的硬度、柔软度和/或密度,以用于随后由切割器或刀进行切割。
32.如所描述的,可以通过(一个或多个)食物切割器104在第一方向上(例如,沿着马铃薯的纵向轴线202,如图14和图19所示出的)然后在第二方向上(例如,垂直于马铃薯的纵
向轴线202,如图15、图20和图24所示出的)切割蔬菜。例如,可以沿马铃薯的轴向长度切割一种或多种形状(例如,螺旋形状,多个环),然后马铃薯可以被切片成单独的块。在一些实施例中,切片可以是平坦的,或至少基本上是平坦的。在其他实施例中,切片可以具有不同的形状(例如,c形、v形、w形等)。
33.食品承载器102的部件可以围绕旋转轴线106被周向布置。每个食物切割器104都可以具有一个或多个切割元件或刀108(例如,如在图5至图11中所示出的环形刀108,如在图12和图13中所示出的螺旋形刀108)和相对应的推进器110,所述推进器110从食品承载器102的旋转轴线106径向面向外。食物切割器104的刀108被配置为接纳食品200并与食品200接合,并且每个推进器110可以与其各自的刀108以可滑动的方式联接,且相对于食品承载器102的旋转轴线106可径向移动,以用于推进食品200以脱离与食物切割器104的接合。
34.在一些实施例中,一个或多个刀108可以由安装板112支撑。刀108可以被紧固(例如,栓接、焊接)到安装板112的肋114。例如,环形刀108可以被点焊到安装板112的肋114。此外,推进器110的各种部件可以由另一安装板116被支撑。例如,推进器110可以包括一个或多个推顶板118,该一个或多个推顶板118通过细长支撑件/导向杆120连接到安装板116。导向杆120和(一个或多个)推顶板118可以被配置为在刀108的相邻段(例如,在螺旋形刀108的情况下)之间行进和/或在多个分离的刀108(例如,在堆叠的环形刀108的情况下)之间行进。
35.在一些实施例中,安装板112可以由安装块122支撑,该安装块122被固定连接到食品承载器102,而安装板116可以与食品承载器102以可滑动的方式联接。在一些实施例中,(一个或多个)推顶板118可以被固定附接(例如,栓接、焊接)到导向杆120,且导向杆120可以被固定连接(例如,栓接、焊接)到安装板116。导向杆120也可以与安装块122以可滑动的方式联接,并由安装块122支撑(例如,使用一个或多个轴承124)。需要说明的是,导向杆120和(一个或多个)推顶板118仅通过示例的方式被提供,而并不意味着限制本公开。在其他实施例中,可以使用不同的推顶器,包括安装到安装板116并在刀108的相邻段之间和/或在多个分离的刀108之间移动的推顶块。
36.食品200(例如,马铃薯)可以从食品供应装置126(例如,承载水供给式食品流的锥形管)移动,并且被径向地分配以与食物切割器104接合。在一些实施例中,水供给式产品流可以在约每平方英寸十五(15)磅(psi)与约二十(20)psi之间的压力下,以约每分钟九百(900)加仑(gpm)与约一千二百(1200)gpm之间被操作。在操作中,食品承载器102围绕旋转轴线106移动,暂停以允许食品200进入食物切割器104处。在一些实施例中,食品承载器102可以被暂停持续大约二分之一(0.5)秒或更长。
37.然后,食品承载器102旋转,从而允许下一个食品200(例如,另一个马铃薯)进入下一个食物切割器104。在一些实施例中,食品承载器102可以在约每分钟三十(30)转(rpm)与约五十(50)rpm之间的速度旋转。随着食品承载器102旋转,推顶器(例如,凸轮)逐渐地伸出并推进马铃薯脱离与食物切割器104的接合。例如,食品切割系统100可以包括一个或多个轨道128(例如,上凸轮轨道,下凸轮轨道),所述轨道被定向成相对于食品承载器102并绕着旋转轴线106大致呈圆形。应该注意的是,水供给式产品流的操作范围、暂停时间和产品承载器的旋转速度仅通过示例的方式被提供,而并不意味着限制本公开。在其他实施例中,食品切割系统100可以以不同的流速、压力、暂停时间、每分钟转数等被操作。
38.在实施例中,(一个或多个)轨道128可以以距食品承载器102的旋转轴线106变化的径向距离d1、d2等(图2)被布置。轨道128可以与一个或多个从动件130(例如,凸轮从动件)联接,且每个从动件130连接到对应的推进器110,以用于推进食品200。在实施例中,每个从动件130可以被固定附接(例如,栓接、焊接)到安装板116,并且可以包括与(一个或多个)凸轮轨道128接合的凸轮从动件轴承132。例如,两个从动件130可以被紧固到安装板116并与上凸轮轨道128和下凸轮轨道128接合,其中每个所述从动件都具有凸轮从动件轴承132。在示例性操作中,食品承载器102在食物切割器104处接纳食品200。当相对应的推进器110推进食品200脱离与食物切割器104的接合时,食品200被移动到食物切割器104的刀108中并在方向134上(图2)围绕旋转轴线106被承载。
39.在本公开的实施例中,食品切割系统100包括一个或多个固定的切片刀136,所述切片刀相对于食物切割器104的行进方向设置在大致切向方位上。切片刀136被配置为当食品承载器10旋转且食品200被逐渐地或逐步地推进以脱离与食物切割器104的接合时,对食品200进行切片。以这种方式,食品200可以在第二方向(例如,垂直于马铃薯的纵向轴线202)上被切割以形成切片。切片刀136可以具有各种刀片形状,包括但不必须限于直刀片形状、弯曲或c形刀片、v形刀片、w形刀片等。例如,在图24到图27所示出的马铃薯形状是通过v形刀片切割而成的。切片刀136可以安装在固定的安装杆138上。食品切割系统100也可以包括斜槽140,并且切割的食品200可以通过加工用水被沿斜槽140冲洗进入水槽(未示出)。食品切割系统100也可以包括罩(未示出),所述罩用于封闭食品承载器102和切片刀136并容纳加工用水和食品200。
40.应当注意的是,虽然在本文中提供的描述使用了其中食品切割系统100的食品承载器102在固定的轨道128上相对于固定的切片刀136旋转的示例,但这些示例并不意味着限制本公开。术语“固定的”和“旋转”应理解为是指食品承载器102和切片刀136相对于彼此的相对运动,而不是相对于另一参照系相对运动(例如,地面)的相对运动。例如,在其他实施例中,食品承载器102可以相对于地面被固定在适当位置,并且切片刀136可以相对于地面围绕旋转轴线旋转。在其他实施例中,食品承载器102和切片刀136两者都可以相对于另一参照系(例如,地面)移动。
41.尽管已经通过特定于结构特征和/或方法动作的语言描述了主题,但是应当理解,所附权利要求中限定的主题不必须限于上述的特定特征或动作。相反,上述特定特征和动作作为实施权利要求的示例形式被公开。