1.本申请提出一种物料运送机械臂,具体涉及物料搬运技术领域。
背景技术:
2.很多企业现在都引入了上下料移载设备桁架,对于机床加工物料周转,采用桁架机器人对现有的人工辅助上下料过程,进行自动化升级改造,达到减轻人的劳动强度和提高工厂智能作业程度的效果。桁架机器人包括上下料机构和夹取机构,夹取机构设于上下料机构,且夹取机构只在一个方向夹取工件的内侧壁,使用机械臂完成周转箱箱盖、毛胚、半成品以及成品夹取等动作,在机床加工范围内效率是高的。然而,由于加工的毛胚从刚刚进入到车间不能直接到达桁架之下,或者加工完成的成品需要从较高处搬运到地面,这时候桁架就不能超出范围来完成搬运,需要人工搬运。另外,桁架本身造价高,对于低利润的产品加工企业自然要考虑成本投入问题,故需要设计一种能够自由移动机械运输并且是低成本是本领域技术人员的共同课题。
技术实现要素:
3.针对现有桁架技术存在不足,本申请提供了一种物料运送机械臂,其特征在于,具有旋转基座、横梁臂,所述旋转基座实现横梁臂作旋转移动,所述升降臂在横梁臂上实现前后移动,所述升降臂依靠横梁臂作升降移动,所述升降臂还安装有关节组。
4.优选地,所述旋转基座具有基座本体和关节一,所述关节一安装在基座本体上,所述关节一具有的输出轴固定连接横梁臂,所述关节一通过输出轴驱动横梁臂作出旋转移动,所述横梁臂具有的导轨电机一匹配前后移送导轨实现升降臂在横梁臂上作出前后移动,所述升降臂具有的导轨电机二匹配升降移送导轨升降运作的移送。
5.优选地,所述关节组安装在升降臂的下端,所述导轨电机二与导轨电机一固定连接板上,所述关节组具有关节二和关节,或者,所述关节组具有关节二、关节三和关节四。
6.优选地,所述关节组安装在升降臂的下端,所述导轨电机二与导轨电机一固定连接板上。
7.优选地,所述导轨电机二和导轨电机一为伺服电机。
8.优选地,所述立柱安装在旋转基座具有的关节一上,所述前拉杆一端安装在立柱与升降臂之间的横梁臂上,所述前拉杆的另一端与立柱顶部连接固定;所述后拉杆一端安装在安装固定在横梁臂的尾部,所述后拉杆的另一端与立柱顶部连接固定。本申请有益效果是:通过旋转基座实现横梁臂作旋转移动,通过升降臂在横梁臂上实现前后移动,通过升降臂依靠横梁臂作升降移动。旋转基座具有基座本体和关节一,关节一安装在基座本体上,所述关节一具有的输出轴固定连接横梁臂,关节一通过输出轴驱动横梁臂作出旋转移动,横梁臂具有的导轨电机一匹配前后移送导轨实现升降臂在横梁臂上作出前后移动,升降臂具有的导轨电机二匹配升降移送导轨升降移送,并且导轨电机二和导轨电机一采用伺服电机,进一步提高机械臂的控制精度。通过上述技术方案本申请的物料运送机械臂一有效解
决了现有物料运送桁架存在运转范围受制约的问题,二是提供了较低价位的物料运送设备,在实际生产上具有较大的发展空间。
附图说明
9.图1是本申请一种物料运送机械臂的构造图;
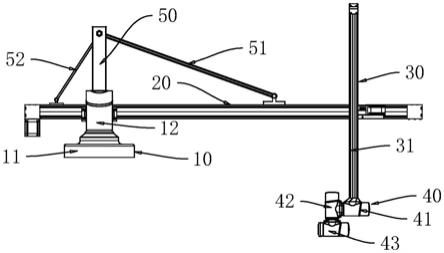
10.图2是本申请一种物料运送机械臂具有立柱和前后拉杆的构造图;
11.图3是本申请一种物料运送机械臂后视构图;
12.图4是本申请一种物料运送机械臂的导轨电机一和导轨电机二安装位置图。
13.附图标记:旋转基座10、基座本体11、关节一12、横梁臂20、前后移送导轨21、导轨电机一22、升降臂30、升降移送导轨31、导轨电机二32、连接板33、关节组40、关节二41、关节三42、关节四43、立柱50、前拉杆51、后拉杆52。
具体实施方式
14.下面结合附图1-4对本申请的优选实施例进行详细阐述,以使本申请的优点和特征能更易于被本领域技术人员理解,从而对本申请的保护范围做出更为清楚明确的界定,这些实施方式仅用于说明本发明,而并非对本发明的限制。
15.实施例一
16.本申请提出一种物料运送机械臂,具有旋转基座10、横梁臂20和升降臂30。上述旋转基座10实现横梁臂20作旋转运作,具体实施的方案可以是旋转基座10具有基座本体11和关节一12,关节一12安装在基座本体11上,关节一12具有的输出轴固定连接有横梁臂20,关节一12通过输出轴驱动横梁臂20作出旋转移动。上述升降臂30在横梁臂20上实现前后移动,具体实施的方案可以是升降臂30具有升降移送导轨31和导轨电机二32;横梁臂20具有前后移送导轨21和导轨电机一22,运行导轨电机一22,使得与导轨电机一22匹配前后移送导轨21实现升降臂30在横梁臂20上作出前后移动。上述升降臂30依靠横梁臂20作升降移动,具体实施的方案可以是运行导轨电机二32,使得与导轨电机二32匹配升降移送导轨31升降移送。
17.上述导轨电机二32与导轨电机一22以连接板33联为一体,电机二32与导轨电机一22固定在连接板33上,使得导轨电机二32与导轨电机一22协同移动。上述的导轨电机二32与导轨电机一22优选采用伺服电机。
18.本申请升降臂30的下端还安装有关节组40,关节组40为物料运送执行端,需要关节组40夹取的物料。
19.实施例二
20.本实施例二与实施例一基本相同,不同之处具有立柱50、前拉杆51和后拉杆52,上述立柱50安装在关节一12上;前拉杆51一端安装在立柱50与升降臂30之间的横梁臂20上,前拉杆51另一端与立柱50顶部连接固定;后拉杆52一端安装在安装固定在横梁臂20的尾部,后拉杆52另一端与立柱50顶部连接固定。上述立柱50、前拉杆51和后拉杆52的设置使得整体的机械臂在运转时结构更加符合力学原理,使得机械臂运转的稳定性得以提高。
21.实施例三
22.本实施例二与实施例一基本相同,不同之处上述关节组40具有关节二41和关节
42,或者,所述关节组40具有关节二41、关节三42和关节四43,上述关节组40设置的关节至少有两个或者两个以上,根据不同运送物料的实际特征和运送环境等因素可以灵活设置两关节或者是三环节。
23.以上所述仅为本申请的优选实施方式,并非因此限制本申请的专利范围,凡是利用本申请说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其它相关的技术领域,均同理包括在本申请的专利保护范围内。
技术特征:
1.一种物料运送机械臂,其特征在于,具有旋转基座(10)、横梁臂(20)和升降臂(30),所述旋转基座(10)实现横梁臂(20)作旋转移动,所述升降臂(30)在横梁臂(20)上实现前后移动,所述升降臂(30)依靠横梁臂(20)作升降移动,所述升降臂(30)还安装有关节组(40),所述旋转基座(10)具有基座本体(11)和关节一(12),所述关节一(12)安装在基座本体(11)上,所述关节一(12)具有的输出轴固定连接横梁臂(20),所述关节一(12)通过输出轴驱动横梁臂(20)作出旋转移动,所述横梁臂(20)具有的导轨电机一(22)匹配前后移送导轨(21)实现升降臂(30)在横梁臂(20)上作出前后移动,所述升降臂(30)具有的导轨电机二(32)匹配升降移送导轨(31)升降运作的移送。2.根据权利要求1所述的一种物料运送机械臂,其特征在于,所述关节组(40)安装在升降臂(30)的下端,所述导轨电机二(32)与导轨电机一(22)固定连接板(33)上,所述关节组(40)具有关节二(41)和关节三(42),或者,所述关节组(40)具有关节二(41)、关节三(42)和关节四(43)。3.根据权利要求1所述的一种物料运送机械臂,其特征在于,所述关节组(40)安装在升降臂(30)的下端,所述导轨电机二(32)与导轨电机一(22)固定连接板(33)上。4.根据权利要求1所述的一种物料运送机械臂,其特征在于,所述导轨电机二(32)和导轨电机一(22)为伺服电机。5.根据权利要求1所述的一种物料运送机械臂,其特征在于,所述机械臂具有立柱(50)、前拉杆(51)和后拉杆(52),所述立柱(50)安装在旋转基座(10)具有的关节一(12)上,所述前拉杆(51)一端安装在立柱(50)与升降臂(30)之间的横梁臂(20)上,所述前拉杆(51)的另一端与立柱(50)顶部连接固定;所述后拉杆(52)一端安装在安装固定在横梁臂(20)的尾部,所述后拉杆(52)的另一端与立柱(50)顶部连接固定。
技术总结
本申请提出一种物料运送机械臂,具体涉及物料搬运技术领域,具有旋转基座、横梁臂和升降臂,旋转基座具有基座本体和关节一,关节一安装在基座本体上,所述关节一具有的输出轴固定连接横梁臂,关节一通过输出轴驱动横梁臂作出旋转移动,横梁臂具有的导轨电机一匹配前后移送导轨实现升降臂在横梁臂上作出前后移动,升降臂具有的导轨电机二匹配升降移送导轨升降移送,并且导轨电机二和导轨电机一采用伺服电机,进一步提高机械臂的控制精度。通过上述技术方案本申请的物料运送机械臂一有效解决了现有物料运送桁架存在运转范围受制约的问题,二是提供了较低价位的物料运送设备,在实际生产上具有较大的发展空间。际生产上具有较大的发展空间。际生产上具有较大的发展空间。
技术研发人员:林子春 吴文俊 潘林勇
受保护的技术使用者:琦星智能科技股份有限公司
技术研发日:2021.02.07
技术公布日:2022/2/15