1.本发明涉及一种用于下肢的假体装置,其具有假体脚和紧固在该假体脚上的小腿部分用于假体装置的调设装置和用于手动调设的方法,以及一种用于手动调设小腿部分相对于假体脚的取向的装置。本发明还涉及一种用于手动调设小腿部分相对于假体脚、假体装置、下肢的取向的调设装置以及一种用于手动调设小腿部分、假体装置、下肢相对于紧固在小腿部分上的假体脚的取向的方法,其中在假体装置上设置具有惯性角度传感器的调设装置,该惯性角度传感器探测小腿部分在空间内的取向并且与输出装置耦合。
背景技术:
2.假体替代不存在的或不再存在的肢体,其中通常致力于让假体不仅替代形状,而且也替代肢体功能的至少一部分。下肢的假体装置具有脚部分,即假体脚,其固定在患者上。如果还存在下肢或下肢的一部分,则假体脚在相应残端上的固定可以通过小腿筒进行。小腿筒能够以各种方式和方法固定在残端上,例如借助假体衬和吸筒技术。如果不再存在天然的膝关节,则假体装置的固定通常在大腿残端上通过大腿筒进行。于是在大腿筒上固定假体膝关节,其具有小腿管或小腿部分,用于将假体脚与假体膝关节耦合。在小腿部分上或中可以设置阻尼装置、调节装置以及传感器和例如用于控制阻尼装置以影响假体膝关节的控制装置。
3.假体脚能够以铰接方式或马达方式驱动地支承在小腿部分上,用于在相应设置的运动中支持患者。在这种构型中,膝关节和踝关节中的运动的协调非常复杂,此外相应的驱动器需要很多空间并且相对沉重。在假体脚的最简单的实施方式中,其构造为无关节的假体脚并且一旦定向之后就持久固定在小腿部分上。这里的困难在于假体脚的定向与不同鞋跟高度的适配,如果患者换鞋的话。此外公开了可摆动地围绕踝关节支承的假体脚,其具有被动式阻尼装置,用于影响背屈或跖屈。此外还存在具有脚部分和近端连接件的假体脚,该连接件可摆动地与足球(脚部分)连接。通过调节装置可使脚部分相对于连接件调节。可以给调节装置配置至少一个位置传感器,该位置传感器与信号产生元件耦合,该信号产生元件根据该位置传感器的信号输出关于到达该脚部分的位置的信号。该位置传感器求取该脚部分相对于该连接件或者紧固在该连接件上的小腿部分的相对位置。替换地,该位置传感器求取该脚部分在调设过程中的空间姿态。由de 10 2014010 938a1公开了这种假体脚。因此可能的是,可以重新找到鞋跟高度调设。
4.现有技术中所建议的装置的缺点是,必须对于每个鞋子单个地调设正确的位置,因为仅仅求取假体脚与小腿之间的相对角度。因此,对于新的鞋跟高度必须首先求取正确的调设并且将其作为参照存储起来。此外,使用者必须从多个参照信号中识别匹配于相应鞋跟高度的信号,这会导致误调设。
技术实现要素:
5.因此,本发明的任务是,提供一种假体装置、一种调设装置以及一种用于调设假体装置的小腿部分的取向的方法,它们能够简单使用并且给予使用者关于正确的假体架构的可靠反馈。
6.根据本发明,该任务通过具有主权利要求的特征的假体装置和具有并列权利要求的调设装置以及方法来解决。在从属权利要求、说明书和附图中公开了本发明的有利构型和进一步扩展。
7.用于下肢的假体装置具有假体脚和紧固在该假体脚上的小腿部分以及用于手动调设小腿部分相对于假体脚的取向的装置,设定:在该假体装置上设置惯性角度传感器,该惯性角度传感器探测小腿部分在空间中的取向并且与输出装置耦合,该输出装置将小腿部分在空间中的取向或者事先确定的取向的达到以对于使用者可识别的方式以输出信号输出。该输出装置优选将小腿部分在空间中的确定的取向以对于使用者可识别的方式输出,例如以光学方式、声学方式或触觉方式输出并且从而传达关于小腿部分在空间中的取向的反馈。该输出可以定性和/或定量地进行,但是也可以通过信号表明达到了小腿部分在空间中的之前已存储的定向。对于测量和平衡假体脚在空间中的取向来确定该取向是否相应于期望的取向代替地,检测小腿部分的空间姿态并且并非检测小腿部分相对于假体脚的相对位置。利用这种假体装置,可以在可调节的假体脚装配在小腿部分上之后通过矫形外科技师最佳地调设假体装置,也就是确保最佳的假体架构。该假体架构是相应的假体部件相互间的定位和取向。该假体架构对于每个患者个性化地调设并且对于患者对该假体装置的功能和接受度具有重大影响。如果该假体架构之前被正确地调设,则患者在使用具有不同鞋跟高度和不同鞋底刚度的另一鞋子模型时可以利用本发明的假体装置简单地再次找到最佳的假体架构。通过调节假体脚相对于下部分直到达到已存储的该下部分在空间中的标准角度或参考角度可以简单地找到通过矫形外科技师调设的最佳姿态,假体脚在该姿态中可以在换鞋或诸如此类之后固定在小腿部分上。由借助于一个惯性传感器或多个惯性传感器和输出装置确定小腿角度的组合允许对于任意的假体脚(其具有用于手动调设小腿部分的装置)调设鞋跟高度。在此,小腿部分的取向的调设完全手动地从解锁关节经过调节角度直到重新锁止地进行。相应地,不需要费事的机电一体化踝关节。相反,对于每个可调节的踝关节给使用者提供简单且可靠的可能性来找到对于不同鞋跟正确的调设。空间中的取向特别是小腿部分相对于重力方向的取向。如果小腿部分例如处于矢状面之内,则小腿部分的取向通过从垂线出发的向前倾斜和沿反方向的向后倾斜限定。如果假体装置的使用者将假体脚解锁,特别是手动解锁,则该假体脚可以相对于小腿部分运动。这有利地当假体脚放上并且小腿部分在矢状面内部例如绕着摆动轴线在踝关节的区域中摆动时进行。在达到小腿部分的正确的位置时,输出对于使用者可感知的信号。
8.本发明的一个拓展方案设置的是:惯性角度传感器和输出装置组合成模块地安装在该假体装置中或者可松脱地紧固在该假体装置上。由此可能的是,可以将调设装置事后安装在假体装置上或者可以进行改装并且可以将原始并非对此设计的假体装置配备该模块。原则上设置的是:惯性角度传感器在任意部位坐置于小腿部分上,例如在较远的远端,用于尽可能无混淆地检测空间姿态。优选地,惯性传感器处于假体脚的近端和踝关节的近端,从而可以节省假体脚中的宝贵的结构空间。输出装置可以与假体装置无关地设置在易
于触及或易于感知的部位上,例如小腿筒、大腿筒上或单独的位置上。在构造为单独元件的构型中,输出装置可以实施为钥匙串上的挂件、在口袋中、实施为臂带或实施为移动电话中的app,从而使用者能够尽可能舒适地得到反馈。于是,惯性传感器优选无缆线地通过无线电或类似数据传输方法与输出装置耦合。在构型为模块、特别是可加装的模块的情况下,惯性角度传感器和输出装置持久地特别是通过缆线相互连接。在分开布置的情况下,输出装置可以仅仅在需要时与惯性角度传感器耦合。于是,该惯性角度传感器与发送装置(其也可以构造为用于其余假体装置的控制装置的部分)耦合,通过该发送装置向输出装置供应关于小腿部分在空间中的位置的相应信号。不仅惯性角度传感器而且输出装置优选与一控制装置耦合,在该控制装置中分析处理传感器数据。在该控制装置中例如存在计算机或存储装置,用于分析处理传感器数据、实施与空间中的参考角度的比较并且输出信号。
9.惯性角度传感器可以优选设置在小腿部分上。对此替换地可以设置的是,惯性角度传感器紧固在假体装置的相对于其在近端设置的元件上,例如紧固在假体膝关节的上部分或紧固在大腿筒上。从关于近端元件的空间姿态的信息结合角度传感器(其测量小腿部分相对于大腿筒的姿态)可以算出小腿部分的空间方位。替换或补充地,可以在大腿相对于小腿预先限定的相对角度的情况下进行小腿角度的求取,从而不需要角度传感器。为此可以设置的是,使用者例如总是在完全伸张的膝盖的情况下实施或者必须实施调设。
10.本发明的一个拓展方案设置的是,负载传感器设置在该假体装置上并且与输出装置如此耦合,以至于在探测到负载时输出输出信号。小腿部分的取向可以在不同的负载时、特别是在不同的轴向负载时改变。在换鞋时,由于不同的鞋底刚度和鞋底几何结构可出现不同的小腿取向并且从而分别出现不同的假体架构。通过负载传感器可以确保总是在相同的负载、例如轴向负载时进行调设,由此确保相同的假体架构。负载传感器可以构造为轴向力传感器、压力传感器或力矩传感器并且例如在小腿部分中、在从假体脚到小腿部分的连接装置中设置在关节上或假体脚上。
11.所述输出装置优选构造用于输出光学、声学和/或触觉输出信号并且可以或者显示小腿部分的瞬时空间姿态(特别是在矢状面中)、在确定的方向上与输入的和存储的取向的偏差和/或预给定取向的达到。输出装置也可以与用于手动调设小腿部分的取向的装置连接或者集成到该装置中。在该情况下,使用者将调节装置解锁并且手动地使假体脚运动直到达到参考位置。在达到参考位置时输出信号,由此使用者得到关于已找到正确调设的反馈。
12.优选地,所述假体脚可摆动地支承在矢状面中,以补偿鞋跟变化。如果也检测到在额状面中的空间姿态,则可以例如当与事先调设的值偏差过大时给出警告信号。
13.本发明的一个拓展方案设置的是,关断装置将所述惯性角度传感器和/或所述输出装置或者将从所述惯性角度传感器到所述输出装置的连接在达到事先确定的取向之后关断,从而可以节省能量。输出装置优选仅当应针对新鞋进行调设和适配时才工作。为此,可以将假体装置置于调设模式中,例如通过输出装置中的输入区或者通过其他开关或指令。如果该调节和调设结束,则这可以或者自动地检测或者手动地被操纵。然后,结束调设模式并且关断输出装置。惯性角度传感器可以继续运行,例如用于给其他假体部件的控制装置提供传感器数据,例如用于控制假体膝关节。优选地,惯性角度传感器构造为假体装置的控制装置的部分,从而该惯性角度传感器的姿态数据不仅用来在鞋跟高度改变或换鞋时
进行识别和调设,而且在行走期间用作用于例如踝关节和/或膝关节中的阻尼电阻的改变的基础。
14.用于手动调设小腿部分相对于下肢的假体装置的假体脚的取向的调设装置,设定:该调设装置具有惯性角度传感器,该惯性角度传感器探测小腿部分在空间中的取向并且与输出装置耦合,该输出装置将小腿部分在空间中的取向或者事先确定的取向的达到以对于使用者可识别的方式以输出信号输出。特别是,所述输出作为光学、声学和/或触觉输出信号进行,其中,在本发明的一个变体中,输出装置与惯性角度传感器和用于分析处理惯性角度传感器数据并且将其传导至输出装置的计算装置组合成一个模块地耦合。
15.在该调设装置上可以设置或构造用于固定在假体装置上的紧固装置,例如可以在相应的部件上设置或构造形状配合元件如夹子、螺钉、卡扣元件和/或钩或者力配合元件如磁铁,用于确保持久的或可再次松开和更换的安装。优选地,该安装在小腿部分上或其他交替部件上以限定的取向进行、例如沿着接触棱边或其他导向装置,例如在轨道上或者在槽中。
16.用于手动调设下肢的假体装置的小腿部分相对于紧固在该小腿部分上的假体脚的取向的方法,其中在该假体装置上设置调设装置,该调设装置具有惯性角度传感器,该惯性角度传感器探测小腿部分在空间中的取向并且与输出装置耦合,设定:对于使用者调设小腿部分在空间中的参考取向并且将事先调设的参考取向的达到以对于使用者可识别的方式以输出信号输出。小腿部分的参考取向优选通过矫形外科技师或经过培训的其他专家进行。用于参考取向的输入优选在假体装置的佩戴状态中在普通负载情况下在用于假体装置的参考架构时进行。普通负载例如是在被照顾侧和不被照顾侧相同重量负载时的站立。在这种方法中可能的是,使用小腿部分在空间中的取向作为相关的参量,从而不必对于每个假体脚存储用于不同位置的参考位置。使用者仅仅得到唯一的信号,即何时达到参考取向,必要时具有需要朝哪个方向进行多少调节以达到参考取向的指示。该调节手动地进行,特别是通过围绕踝关节轴的摆动,该踝关节轴垂直于小腿部分在额状面中的纵向延伸。由此确保的是,小腿部分仅仅在矢状面中摆动。替换地,可以在小腿部分上的脚部分的紧固装置上进行摆动,例如在所谓的金字塔适配器上,其中原则上在那里也可以进行在额状面中的摆动。
17.优选地,所述调设在佩戴的、特别是受载的假体装置的情况下进行,以便对于使用者即使在不同鞋子的情况下也能确保在使用时保持不变的假体架构。
18.所述调设可以自动地在每个假体脚变换时、在每个鞋跟高度变换时或者根据单独的激活信号开始和实施。如果例如在佩戴假体装置之后探测到不同于参考取向的空间姿态,则可以向使用者输出用于重新取向或者检查的指示并且接通调设-或检查模式。在完成调设之后,调设装置优选自动关停,特别是,输出装置关断,以使得能耗最小化。如果例如更换鞋子,则输出装置给出输出信号或反馈:目前存在的小腿取向偏离了参考取向。然后,手动调设小腿与假体脚之间的相对角度,直到输出装置给出输出信号或反馈:小腿取向相应于或者足够近地接近参考取向。在达到正确位置之后,将假体脚特别是手动地固定在该位态中,从而使得假体脚的近端连接件、例如金字塔适配器不再相对于小腿部分运动。假体脚自身可以具有关节或者区域地相对于小腿部分运动。调设过程的结束可以通过输出装置显示或输出,例如在自动识别到存在正确的调设之后或者当输入了相应的操纵信号时。
附图说明
19.下面借助于附图详细阐述本发明的实施例。附图中:
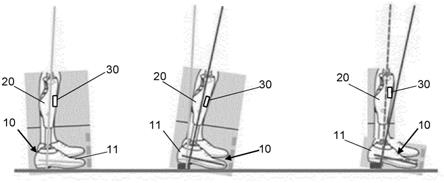
20.图1示出调设过程的示意图;
21.图2示出具有不同鞋子的假体装置;
22.图3示出具有小腿筒的假体装置的示意图;
23.图4示出图3的变体,其具有假体膝关节和大腿筒;
24.图5示出具有单独的输出装置的示意图;以及
25.图6示出具有集成的输出装置的变体。
具体实施方式
26.图1示出三个位置或状态,假体装置在使用期间可以处于这些位置或状态中。在图1的左图中示出具有假体脚10和小腿部分20的假体装置。在该小腿部分20的近端上设置假体膝关节,其与未示出的大腿筒连接。通过该大腿筒将该假体装置固定在大腿残端上。在所示的实施例中,在小腿部分20上设置惯性角度传感器30,其也被称为惯性测量单元或imu,其可以构造为由一个或多个陀螺仪(必要时用加速度传感器补充)组成的结构组件。在图1的左图中示出的取向作为参考取向被存储,其中提供假体脚10和小腿部分20的相应的纵向延伸作为参考量。所存储的参考取向是该假体装置的所谓的参考架构,其通过矫形外科技师调设、存储和记录或存档。该存储可以在存储装置中进行,该存储装置可以是用于控制假体膝关节中的阻尼装置的控制装置的部分。同样,惯性角度传感器30可以是用于假体膝关节的控制装置的部分。该假体架构是各单个假体部件相互间的空间对应配置。在参考调设中,致力于使所有的假体部件相互间最佳地定向,从而假体使用者可以从该假体装置中抽取最可能的利用。因为假体装置通常与鞋子11一起佩戴,因此需要将假体架构与佩戴的鞋子11一起调设。鞋子11一般是由使用者通常携带的模型。如果更换鞋子模型并且鞋子11具有其他鞋跟高度(就像在图1的中间图示出的那样),则假体架构改变并且特别是小腿部分20的取向改变。在图1的中间图中可以看到,小腿部分20的纵向延伸由于不同的鞋跟高度而向前倾斜,假体脚10的斜率也发生改变。惯性角度传感器30或imu30或者在通过使用者激活检查模式之后或者自动地探测小腿部分20在空间中的斜率和取向。因为小腿部分20的取向不再相应于参考取向,因此通过未示出的输出装置输出信号:取向和假体架构不再正确。然后,例如可以解锁或松脱摆动轴(假体脚10相对于小腿部分20可以围绕该摆动轴摆动)的锁定并且使得小腿部分20如此长时间地摆动,直到又占据参考取向为止。一旦达到该情况,则输出装置向使用者输出相应的信号,该使用者可以又将锁定装置激活并且锁止摆动轴。正确的空间姿态通过imu或惯性角度传感器30探测并且通过光学、声学和/或触觉信号显示。替换地,可以通过输出装置显示相应占据的空间姿态角度或者相对于参考角度或相对于参考取向的距离。在右图中,小腿部分20又处于原始参考取向,这通过虚线表明。
27.在图2中以单个图示出假体装置的相关部件。左图示出假体脚10,其处于具有鞋跟12的鞋子11中。该假体脚10具有摆动装置15,用于使小腿管形状的小腿部分20可以围绕该摆动装置绕着摆动轴线摆动。惯性角度传感器30紧固在该小腿部分20上。左边的第二图示出替换的、具有更高的鞋跟12的鞋子11。在左边的第三图中,假体脚10插入到该替换的鞋子11中。由于两个鞋子模型之间的不同的斜度,需要使小腿部分20逆着反方向、也就是向后摆
动。为此,小腿部分20沿箭头方向向后摆动并且通过惯性角度传感器30检查该小腿部分20的摆动过程或空间姿态取向。一旦在空间中达到了该小腿部分20的正确的定向,特别是当患者不仅在被照顾侧而且在不被照顾侧相同地负载时,通过输出装置40输出光学、声学和/或触觉信号,该信号表明达到了正确的取向。然后,使用者将摆动装置15锁定以防假体脚10相对于小腿部分20不期望地移位。接着,可以中断输出装置40的电流供给以节省能量。该惯性角度传感器30可以被进一步用来提供传感器输出。
28.在图3中示出具有假体脚10、小腿部分20以及紧固在其上的惯性角度传感器30的假体装置。该假体脚10通过摆动装置15围绕轴线可摆动地支承在该小腿部分20上。该小腿部分20具有小腿筒以及小腿管,惯性角度传感器30或者持久地或者可取下地固定在该小腿管上。此外,在小腿筒上设置紧固装置70,未示出的输出装置40或由惯性角度传感器30和输出装置40组成的模块固定在该紧固装置上。该模块即输出装置40和/或惯性角度传感器30构造为优选可无损拆卸地固定和安装在该紧固装置70上。该固定可以通过形状配合元件如螺钉、栓、钩或夹紧元件或者力配合地借助于磁铁或利用由形状配合元件和力配合元件形成的组合进行。惯性角度传感器30或imu的组件可以或者集成在踝关节的一部分中或者可拆卸地紧固在该踝关节的一部分上,该部分与小腿部分20固定地连接。还可能的是,传感器30设置在小腿部分20的结构部分上,例如小腿管或小腿筒上。
29.在图4中示意性示出假体装置,在该假体装置中,近端假体部件50设置在小腿部分20上。该近端假体部件50例如是大腿筒,其具有至假体膝关节25的连接管。在所示的实施例中,惯性角度传感器30又设置在小腿部分20上,替换地,该惯性角度传感器30并且必要时输出装置40集成地或者可拆紧固地设置在膝关节25或大腿筒或者大腿筒与假体膝关节之间的连接部分上。同样,该惯性角度传感器30可以设置在假体膝关节的上部分中。结合角度传感器(其检测小腿部分20与近端部件50之间的角度),可以由该近端部件50的空间姿态探测小腿部分20的空间姿态。此外,在图4的实施例中设置负载传感器60,其设置在假体脚10和摆动装置15上。负载传感器60可以例如是轴向力传感器、压力传感器和/或力矩传感器,用于检测假体装置上的相应负载。这些负载传感器60或者这个负载传感器60与控制装置耦合,该控制装置也与惯性角度传感器30耦合。由此例如可以在假体装置受载的情况下识别是否进行假体架构的调设。在图4的实施例中,输出装置40与惯性角度传感器30组合成一个模块并且固定在小腿部分20上。
30.在图5中,输出装置40与惯性角度传感器30分开地并且在空间上分离地构成,例如以移动电话的构型,相应的数据由惯性角度传感器30、必要时通过单独的发送装置无线地传输给该移动电话。从传感装置到输出装置40的数据传输可以通过无线电、wlan、蓝牙、nfc或其他传输路径进行。输出装置除了光学显示之外还可以输出声学反馈或震动信号,用于在鞋跟高度变换之后通知使用者已达到正确的调设。
31.在图6中示出本发明的另一变体,在该变体中,输出装置40设置在作为近端部件的假体筒50上。输出装置40集成在假体筒50中。惯性角度传感器30或imu设置在小腿部分20上。从惯性角度传感器30到输出装置40的传输无线地进行。在将假体脚10相对于小腿部分20手动解锁之后,例如将假体脚10连同鞋子、特别是具有与之前已匹配的鞋子的鞋跟高度不同的鞋跟高度的鞋子放到地面上。假体脚10与地面的接触通过力传感器60求取。小腿部分20围绕踝关节15如此长时间地摆动,直到达到小腿部分20在空间中的之前已设定的参考
取向为止。为此,例如设置的是,小腿部分20处于矢状面内部或者在该矢状面的内侧和外侧处于确定的角度范围之内。在达到小腿部分20的参考取向时,由输出装置40输出光学、声学或触觉信号,该信号表明达到了期望的姿态。