1.本发明涉及消防车模型技术领域,更具体地说,涉及一种履带消防车模型。
背景技术:
2.履带式消防车是一种适合于在林区各种复杂地形条件下进行森林防火灭火、运输消防人员、器械和物资的专用车辆,其具有轻量化高机动性、高通过性运载平台的系统优化与综合集成;运载平台具有较高自身防护功能的轻量化框架式薄壳车体、大承载能力、高通过性的履带与行走装置、集成化的动力与传动装置技术;高效率的森林灭火装置的集成应用。该车消防泵为高压消防泵,该消防泵为独立功能单元。因履带车辆震动大,易导致产品损坏。该车采用减震技术,将该功能单元优化集成于履带式车辆上,解决了产品的可靠性问题,现市面上存在的履带消防车模型,大多数使用寿命较低,无法使外部负载与车体连接滑轨,控制信号采用15针插头,无法便捷的快速的更换外置负载。
3.鉴于此,我们提出一种履带消防车模型。
技术实现要素:
4.1.要解决的技术问题
5.本发明的目的在于提供一种履带消防车模型,以解决上述背景技术中提出的问题。
6.2.技术方案
7.一种履带消防车模型,包括车体、上盖体、主动轮、承重轮、云台水平回转舵机座、云台转盘、云台俯仰舵机支架、滑轨、俯仰舵机侧盖和辅助轮,所述车体的顶端安装有上盖体,所述车体的两端均匀安装主动轮、承重轮与辅助轮,所述车体的安装于云台水平回转舵机座、云台转盘与云台俯仰舵机支架的内腔,所述云台水平回转舵机座的两侧均开设俯仰舵机侧盖;
8.所述车体由履带车底盘、遥控系统、动力系统、供电系统、图传系统、伺服系统和滑轨组成;
9.所述遥控系统包括航模遥控器及接收机,所述动力系统包括两枚直流有刷减速电机以及一个双向双路有刷电调。
10.优选地,所述供电系统在接入主电源时输出电压为5v、7.4v及12v。
11.优选地,所述图传系统包括5.8g模拟图传或wif图传以及以第一视角驾驶以及超视距驾驶提供第一视角画面的摄像头。
12.优选地,所述伺服系统包括90
°
金属舵机和270
°
金属舵机各一枚。
13.优选地,所述滑轨位于舵机云台上侧,滑轨下方设有插头,与任务负载的插头相连接,所述车体包括车板、通透腔和穿插柱,所述车板的边缘开设通透腔,所述车板的两端排列开设穿插柱。
14.优选地,所述上盖体包括盖体和通透腔,所述盖体的中间开设通透腔。
15.优选地,所述云台水平回转舵机座包括座体、穿插腔、凹腔、横穿孔和耳块,所述座体的内腔开设穿插腔,所述座体的边缘开设凹腔,所述座体的侧端面开设横穿孔,所述座体的两侧底端排列开设耳块。
16.优选地,所述云台转盘包括盘体、贯穿孔、排列孔、安装口、安装腔和环形排列螺孔,所述盘体的中间开设贯穿孔,所述贯穿孔的外侧开设排列孔,所述排列孔的一侧开设安装口,所述盘体的内侧开设安装腔,所述安装腔的边缘排列开设环形排列螺孔。
17.优选地,所述云台俯仰舵机支架包括安装支架与加强块,所述安装支架为一种c形构件,所述安装支架的内腔设置加强块。
18.优选地,所述任务负载包括机械臂,所述机械臂包括大臂、小臂和抓手,
°
金属齿舵机对机械臂进行驱动,大臂下端直接连接到车身舵机云台的滑轨上大臂的回转运动以及俯仰运动由舵机云台提供动力,小臂后端连接在大臂的上端,小臂前端连接抓手部分,小臂的控制采用平行四边形机构。
19.3.有益效果
20.相比于现有技术,本发明的优点在于:
21.1、本发明提出了一种履带消防车模型,任务负载包括机械臂或其他带有配套滑轨的任务装置,机械臂主要包括大臂,小臂,以及抓手,其中机械臂的动力主要以90
°
金属齿舵机提供。其中大臂下端直接连接到车身舵机云台的滑轨上大臂的回转运动以及俯仰运动由舵机云台提供动力,小臂后端连接在大臂的上端,小臂前端连接抓手部分,小臂的控制采用平行四边形机构,结合舵机完成抬升和下降的动作,抓手可以进行上抬、下降、左右滚转的姿态变化,以及抓取功能,抓手上抬下降结构与小臂控制类似,左右滚转动作的完成使用一枚180
°
舵机连接在上抬下降结构后面,舵机输出轴连接抓手以实现左右各90
°
的滚转控制。抓手的开合采用平行四边形机构和齿轮的传动进行抓手的松开和抓取动作。
22.2、本发明提出了一种履带消防车模型,本车的动力采用一颗370三级行星减速电机,为履带提供较强的动力,电机的调速采用一片13a双路双向有刷电调,舵机云台采用两颗mg995舵机,扭矩为13kg/cm,控制部分采用标准航模遥控器,接收机输出1000~2000us占空比信号,市面上大多数电调/舵机都可以使用,本车还安装有继电器一个,可以用作较大工作电流的外部负载的控制,供电系统采用一片8.4v降压模块一片5v降压模块以及一片3.3v降压模块,分别为外部负载、舵机、接收机、图传、以及摄像头供电,主电源采用一块3s(11.1v)2200mah电池,动力系统直接采用电池电压供电。
23.3、本发明提出了一种履带消防车模型,本车使用履带行走装置,可以增强本车的通过性,可以在更复杂的路面上行驶,可以完成原地掉头等动作,为减少不必要的阻力,所以在除主动轮以外其他的轮子上均安装两颗轴承,使轮子旋转更顺滑,舵机云台的水平回转舵机是把舵机固定在车体上,输出轴通过舵盘连接在回转平台上,云台俯仰舵机通过支架固定在回转平台上,云台俯仰舵机需要一个外壳,外壳在舵机底部,和输出轴相对的地方安装一颗轴承,安装到舵机支架上时可以避免只有舵机输出轴受力,提高舵机使用寿命,外部负载与车体连接采用了滑轨,控制信号采用15针插头,可以方便快速的更换外置负载。
附图说明
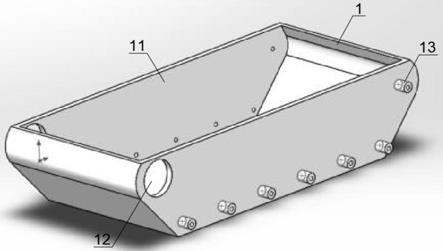
24.图1为本发明本发明提出了一种履带消防车模型车体结构示意图;
25.图2为本发明本发明提出了一种履带消防车模型上盖板结构示意图;
26.图3为本发明本发明提出了一种履带消防车模型主动轮结构示意图;
27.图4为本发明本发明提出了一种履带消防车模型承重轮结构示意图;
28.图5为本发明本发明提出了一种履带消防车模型辅助轮结构示意图;
29.图6为本发明本发明提出了一种履带消防车模型云台水平回转舵机座结构示意图;
30.图7为本发明本发明提出了一种履带消防车模型云台转盘结构示意图;
31.图8为本发明本发明提出了一种履带消防车模型云台转盘侧视图;
32.图9为本发明本发明提出了一种履带消防车模型云台俯仰舵机支架结构示意图;
33.图10为本发明本发明提出了一种履带消防车模型滑轨结构示意图;
34.图11为本发明本发明提出了一种履带消防车模型俯仰舵机侧盖结构示意图。
35.图中标号说明:1、车体;11、车板;12、通透腔;13、穿插柱;2、上盖体;21、盖体;22、通透腔;3、主动轮;4、承重轮;5、云台水平回转舵机座;51、座体;52、穿插腔;53、凹腔;54、横穿孔;55、耳块;6、云台转盘;61、盘体;62、贯穿孔;63、排列孔;64、安装口;65、安装腔;66、环形排列螺孔;7、云台俯仰舵机支架;71、安装支架;72、加强块;8、滑轨;9、俯仰舵机侧盖;10、辅助轮。
具体实施方式
36.在本发明的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”、“顺时针”、“逆时针”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的设备或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
37.在本发明的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。
38.在本发明的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“设置有”、“套设/接”、“连接”等,应做广义理解,例如“连接”,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
39.请参阅图1-3,本发明提供一种技术方案:
40.实施例1
41.一种履带消防车模型,包括车体1、上盖体2、主动轮3、承重轮4、云台水平回转舵机座5、云台转盘6、云台俯仰舵机支架7、滑轨8、俯仰舵机侧盖9和辅助轮10,车体1的顶端安装有上盖体2,车体1的两端均匀安装主动轮3、承重轮4与辅助轮10,车体1的安装于云台水平回转舵机座5、云台转盘6与云台俯仰舵机支架7的内腔,云台水平回转舵机座5的两侧均开设俯仰舵机侧盖9,车体1由履带车底盘、遥控系统、动力系统、供电系统、图传系统、伺服系统和滑轨8组成,遥控系统包括航模遥控器及接收机,动力系统包括两枚直流有刷减速电机以及一个双向双路有刷电调,供电系统在接入主电源时输出电压为5v、7.4v及12v,图传系统包括5.8g模拟图传或wif图传以及以第一视角驾驶以及超视距驾驶提供第一视角画面的
摄像头,伺服系统包括90
°
金属舵机和270
°
金属舵机各一枚,滑轨8位于舵机云台上侧,滑轨8下方设有插头,与任务负载的插头相连接,车体1包括车板11、通透腔12和穿插柱13,车板11的边缘开设通透腔12,车板11的两端排列开设穿插柱13,上盖体2包括盖体21和通透腔22,盖体21的中间开设通透腔22,云台水平回转舵机座5包括座体51、穿插腔52、凹腔53、横穿孔54和耳块55,座体51的内腔开设穿插腔52,座体51的边缘开设凹腔53,座体51的侧端面开设横穿孔54,座体51的两侧底端排列开设耳块55,云台转盘6包括盘体61、贯穿孔62、排列孔63、安装口64、安装腔65和环形排列螺孔66,盘体61的中间开设贯穿孔62,贯穿孔62的外侧开设排列孔63,排列孔63的一侧开设安装口64,盘体61的内侧开设安装腔65,安装腔65的边缘排列开设环形排列螺孔66,云台俯仰舵机支架7包括安装支架71与加强块72,安装支架71为一种c形构件,安装支架71的内腔设置加强块72。
42.实施例2
43.一种履带消防车模型,任务负载包括机械臂,机械臂包括大臂、小臂和抓手,90
°
金属齿舵机对机械臂进行驱动,大臂下端直接连接到车身舵机云台的滑轨上大臂的回转运动以及俯仰运动由舵机云台提供动力,小臂后端连接在大臂的上端,小臂前端连接抓手部分,小臂的控制采用平行四边形机构。
44.实施例3
45.一种履带消防车模型,任务负载包括机械臂或其他带有配套滑轨的任务装置,机械臂主要包括大臂,小臂,以及抓手,其中机械臂的动力主要以90
°
金属齿舵机提供。其中大臂下端直接连接到车身舵机云台的滑轨上大臂的回转运动以及俯仰运动由舵机云台提供动力,小臂后端连接在大臂的上端,小臂前端连接抓手部分,小臂的控制采用平行四边形机构,结合舵机完成抬升和下降的动作,抓手可以进行上抬、下降、左右滚转的姿态变化,以及抓取功能,抓手上抬下降结构与小臂控制类似,左右滚转动作的完成使用一枚180
°
舵机连接在上抬下降结构后面,舵机输出轴连接抓手以实现左右各90
°
的滚转控制。抓手的开合采用平行四边形机构和齿轮的传动进行抓手的松开和抓取动作。
46.实施例4
47.一种履带消防车模型,本车的动力采用一颗370三级行星减速电机,为履带提供较强的动力,电机的调速采用一片13a双路双向有刷电调,舵机云台采用两颗mg995舵机,扭矩为13kg/cm,控制部分采用标准航模遥控器,接收机输出1000~2000us占空比信号,市面上大多数电调/舵机都可以使用,本车还安装有继电器一个,可以用作较大工作电流的外部负载的控制,供电系统采用一片8.4v降压模块一片5v降压模块以及一片3.3v降压模块,分别为外部负载、舵机、接收机、图传、以及摄像头供电,主电源采用一块3s(11.1v)2200mah电池,动力系统直接采用电池电压供电。
48.实施例5
49.一种履带消防车模型,本车使用履带行走装置,可以增强本车的通过性,可以在更复杂的路面上行驶,可以完成原地掉头等动作,为减少不必要的阻力,所以在除主动轮以外其他的轮子上均安装两颗轴承,使轮子旋转更顺滑,舵机云台的水平回转舵机是把舵机固定在车体上,输出轴通过舵盘连接在回转平台上,云台俯仰舵机通过支架固定在回转平台上,云台俯仰舵机需要一个外壳,外壳在舵机底部,和输出轴相对的地方安装一颗轴承,安装到舵机支架上时可以避免只有舵机输出轴受力,提高舵机使用寿命,外部负载与车体连
接采用了滑轨,控制信号采用15针插头,可以方便快速的更换外置负载。
50.除此之外,一种履带消防车模型,任务负载包括机械臂或其他带有配套滑轨的任务装置,机械臂主要包括大臂,小臂,以及抓手,其中机械臂的动力主要以90
°
金属齿舵机提供。其中大臂下端直接连接到车身舵机云台的滑轨上大臂的回转运动以及俯仰运动由舵机云台提供动力,小臂后端连接在大臂的上端,小臂前端连接抓手部分,小臂的控制采用平行四边形机构,结合舵机完成抬升和下降的动作,抓手可以进行上抬、下降、左右滚转的姿态变化,以及抓取功能,抓手上抬下降结构与小臂控制类似,左右滚转动作的完成使用一枚180
°
舵机连接在上抬下降结构后面,舵机输出轴连接抓手以实现左右各90
°
的滚转控制。抓手的开合采用平行四边形机构和齿轮的传动进行抓手的松开和抓取动作,本车的动力采用一颗370三级行星减速电机,为履带提供较强的动力,电机的调速采用一片13a双路双向有刷电调,舵机云台采用两颗mg995舵机,扭矩为13kg/cm,控制部分采用标准航模遥控器,接收机输出1000~2000us占空比信号,市面上大多数电调/舵机都可以使用,本车还安装有继电器一个,可以用作较大工作电流的外部负载的控制,供电系统采用一片8.4v降压模块一片5v降压模块以及一片3.3v降压模块,分别为外部负载、舵机、接收机、图传、以及摄像头供电,主电源采用一块3s(11.1v)2200mah电池,动力系统直接采用电池电压供电本车使用履带行走装置,可以增强本车的通过性,可以在更复杂的路面上行驶,可以完成原地掉头等动作,为减少不必要的阻力,所以在除主动轮以外其他的轮子上均安装两颗轴承,使轮子旋转更顺滑,舵机云台的水平回转舵机是把舵机固定在车体上,输出轴通过舵盘连接在回转平台上,云台俯仰舵机通过支架固定在回转平台上,云台俯仰舵机需要一个外壳,外壳在舵机底部,和输出轴相对的地方安装一颗轴承,安装到舵机支架上时可以避免只有舵机输出轴受力,提高舵机使用寿命,外部负载与车体连接采用了滑轨,控制信号采用15针插头,可以方便快速的更换外置负载。
51.以上显示和描述了本发明的基本原理、主要特征和本发明的优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的仅为本发明的优选例,并不用来限制本发明,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。本发明要求保护范围由所附的权利要求书及其等效物界定。