1.本发明涉及海洋工程技术领域,尤其涉及一种用于水下的仿生海豚机器装置及系统。
背景技术:
2.在江河湖海进行勘探、监测、采样时,需要进行水下作业,一般会让工作人员潜水工作。但是遇到大风大量、水位上涨、洪水来袭时,容易出现安全隐患。
3.在涉及水下作业时,驾驶专业船只或使用人力进行水下作业都费时费力,传统螺旋桨水下机器人易受到水草,砂石等影响。
4.为了解决上述问题,科研院校和企业开发了很多水下机器人来完成上述工作。
5.北京大学工学院智能仿生机器实验室研制了一种装配有机械鳍肢的新型仿生机器海豚系统。用一个串联的、多关节的上下摆动机构来实现背腹式运动,用左右摆动的转弯机构和两自由度运动的鳍肢机构来实现机动运动。该项目以五个自由度,模拟海豚游泳时尾部的控制方式。并通过步进电机控制拉绳和转轴来控制胸鳍。然而这种系统不具有上浮、下潜、只能以特定角度入水,以其他角度入水时不容易平衡、出现倾倒等问题。
6.中国科学院自动化研究所复杂系统与智能科学实验室,研发了一种基于形体和运动仿生的机器海豚。采用三自由度鳍肢来实现上升下潜运动和制动,以及一套独立的转弯机构来实现机器海豚的转向。同样地,这种系统只能以特定角度入水,以其他角度入水时不容易平衡、出现倾倒等问题。
7.目前针对相关技术中存在的无法实现上浮下潜、只能以特定角度入水、无法保持平衡等问题,尚未提出有效的解决方案。
技术实现要素:
8.本发明的目的是针对现有技术中的不足,提供一种用于水下的仿生海豚机器装置及系统,以解决相关技术中存在的无法实现上浮下潜、只能以特定角度入水、无法保持平衡等问题。
9.为实现上述目的,本发明采取的技术方案是:
10.第一方面,本发明提供一种用于水下的仿生海豚机器装置,包括:
11.主体单元;
12.尾鳍单元,所述尾鳍单元可拆卸地设置于所述主体单元的尾端;
13.胸鳍单元,所述胸鳍单元对称且可拆卸地设置于所述主体单元的两侧;
14.浮沉单元,所述浮沉单元设置于所述主体单元的内部,用于调节所述主体单元的重量;
15.重心调节单元,所述重心调节单元设置于所述主体单元的内部,用于调节所述主体单元的重心;
16.控制单元,所述看内置单元设置于所述主体单元的内部,并分别与所述尾鳍单元、
所述胸鳍单元、所述浮沉单元、所述重心调节单元连接。
17.在其中的一些实施例中,所述主体单元包括:
18.第一壳体元件;
19.第一安装元件,所述第一安装元件设置于所述第一壳体元件的尾端,并与所述尾鳍单元连接;
20.第二安装元件,所述第二安装元件对称地设置于所述第一壳体元件的两侧,并与对应的所述胸鳍单元连接;
21.通孔元件,所述通孔元件设置于所述第一壳体元件的表面,用于使所述尾鳍单元、所述胸鳍单元经所述通孔元件与所述控制单元连接,以及使所述浮沉单元与外界连通;
22.第二壳体元件,所述第二壳体元件可拆卸地设置于所述第一壳体元件的上部,并密封所述第一壳体元件;
23.防水元件,所述防水元件设置于所述第一壳体元件与所述第二壳体元件的连接位置;
24.连接元件,所述连接元件依次与所述第二壳体元件、所述第一壳体元件进行可拆卸连接。
25.在其中的一些实施例中,所述第一壳体元件包括:
26.下壳体,所述下壳体与所述第二壳体元件进行可拆卸连接;
27.第一开口,所述第一开口设置于所述下壳体的上表面;
28.若干第一连接孔,若干所述第一连接孔环绕所述第一开口设置,并与所述连接元件进行可拆卸连接;
29.加强筋,所述加强筋设置于所述下壳体元件的内部的底部。
30.在其中的一些实施例中,所述第二壳体元件包括:
31.上壳体,所述上壳体与所述第一壳体元件进行可拆卸连接;
32.第二开口,所述第二开口设置于所述上壳体的下表面;
33.若干第二连接孔,若干所述第二连接孔环绕所述第二开口设置,并与所述连接元件进行可拆卸连接;
34.背鳍片,所述背鳍片设置于所述上壳体的上表面。
35.在其中的一些实施例中,所述防水元件包括:
36.防水槽,所述防水槽设置于所述第一壳体元件的上表面;
37.防水密封圈,所述防水密封圈可拆卸地设置于所述防水槽。
38.在其中的一些实施例中,所述尾鳍单元包括:
39.至少一第一驱动元件,所述第一驱动元件与所述主体单元的尾端进行可拆卸连接,并与所述控制单元连接;
40.尾鳍元件,所述尾鳍元件与所述第一驱动元件固定连接,用于在所述第一驱动元件的作用下进行上下摆动。
41.在其中的一些实施例中,所述第一驱动元件包括:
42.第一支架,所述第一支架与所述主体单元的尾端进行可拆卸连接;
43.第二支架,所述第二支架与所述第一支架转动连接;
44.第一驱动电机,所述第一驱动电机与所述第二支架固定连接,并与所述第一支架
转动连接;
45.第三支架,所述第三支架分别与所述第二支架、所述尾鳍元件固定连接。
46.在其中的一些实施例中,所述第一驱动元件为n个,其中,n为大于等于2的整数;
47.n个所述第一驱动元件依次连接,位于头端的所述第一驱动元件与所述主体单元的尾端连接,位于尾端的所述第一驱动元件与所述尾鳍元件连接。
48.在其中的一些实施例中,所述尾鳍元件包括:
49.尾鳍片;
50.第一连接支架,所述第一连接支架分别与所述尾鳍片、所述第一驱动元件连接。
51.在其中的一些实施例中,所述尾鳍单元还包括:
52.第四驱动元件,所述第四驱动元件分别与所述第一驱动元件、所述尾鳍元件连接,或,所述第四驱动元件分别与所述主体单元的尾端、所述第一驱动元件连接,并与所述控制单元连接,用于驱动所述尾鳍元件进行转动。
53.在其中的一些实施例中,所述第四驱动元件包括:
54.第四驱动电机,所述第四驱动电机分别与所述第一驱动元件、所述尾鳍元件连接,或,所述第四驱动元件分别与所述主体单元的尾端、所述第一驱动元件连接,并与所述控制单元连接,用于驱动所述尾鳍元件进行转动。
55.在其中的一些实施例中,所述第四驱动元件还包括:
56.第四支架,所述第四支架分别与所述第一驱动元件、所述第四驱动电机连接。
57.在其中的一些实施例中,所述尾鳍单元还包括:
58.第三壳体元件,所述第三壳体元件分别与所述主体单元的尾端、所述尾鳍元件连接,所述第三壳体元件的内部设置所述第一驱动元件。
59.在其中的一些实施例中,所述胸鳍单元包括:
60.第二驱动元件,所述第二驱动元件与所述主体单元的侧部进行可拆卸连接,并与所述控制单元连接;
61.胸鳍元件,所述胸鳍元件与所述第二驱动元件连接,用于在所述第二驱动元件的作用下进行转动。
62.在其中的一些实施例中,所述第二驱动元件包括:
63.第二驱动电机,所述第二驱动电机与所述主体单元的侧部连接,并与所述控制单元连接。
64.在其中的一些实施例中,所述胸鳍元件包括:
65.胸鳍片;
66.第二连接支架,所述第二连接支架分别与所述胸鳍片、所述第二驱动元件连接。
67.在其中的一些实施例中,所述胸鳍单元还包括:
68.第五驱动元件,所述第五驱动元件分别与所述第二驱动元件、所述胸鳍元件连接,或,所述第五驱动元件分别与所述主体单元的侧部、所述第二驱动元件连接,并与所述控制单元连接,用于驱动所述胸鳍元件进行上下摆动。
69.在其中的一些实施例中,所述第二驱动元件还包括:
70.第五支架,所述第五支架分别与所述第五驱动元件、所述第二驱动电机连接。
71.在其中的一些实施例中,所述第五驱动元件包括:
72.第六支架,所述第六支架与所述主体单元的侧部进行可拆卸连接;
73.第七支架,所述第七支架与所述第六支架转动连接;
74.第五驱动电机,所述第五驱动电机与所述第七支架固定连接,并与所述第六支架转动连接;
75.第八支架,所述第八支架分别与所述第七支架、所述第二驱动元件固定连接。
76.在其中的一些实施例中,所述第五驱动元件包括:
77.第六支架,所述第六支架与所述第二驱动元件转动连接;
78.第七支架,所述第七支架与所述第六支架转动连接;
79.第五驱动电机,所述第五驱动电机与所述第七支架固定连接,并与所述第六支架转动连接;
80.第八支架,所述第八支架分别与所述第七支架、所述胸鳍元件固定连接。
81.在其中的一些实施例中,所述胸鳍单元还包括:
82.第四壳体元件,所述第四壳体元件分别与所述主体单元的侧部、所述胸鳍元件连接,所述第四壳体元件的内部设置所述第二驱动元件。
83.在其中的一些实施例中,所述浮沉单元包括:
84.鱼鳔元件,所述鱼鳔元件设置于所述主体单元的内部;
85.第一液体输送元件,所述第一液体输送元件设置于所述主体单元的内部,所述第一液体输送元件的一端与所述鱼鳔元件连接,所述第一液体输送元件的另一端与所述主体单元的外部连通,并与所述控制单元连接,用于将所述主体单元的外部的液体输送至所述鱼鳔元件的内部、以及将所述鱼鳔元件的内部的液体输送至所述主体单元的外部。
86.在其中的一些实施例中,所述重心调节单元包括:
87.第三驱动元件,所述第三驱动元件设置与所述主体单元的内部,并与所述控制单元连接;
88.滑动元件,所述滑动元件与所述第三驱动元件连接,用于在所述第三驱动元件的作用下进行直线往复运动;
89.配重元件,所述配重元件与所述滑动元件连接,用于在所述滑动元件的作用下进行直线往复运动,以调节所述主体单元的重心。
90.在其中的一些实施例中,还包括:
91.图像获取单元,所述图像获取单元设置于所述主体单元,并与所述控制单元连接,用于获取所述仿生海豚机器装置的周围环境图像。
92.在其中的一些实施例中,所述图像获取单元包括:
93.视觉传感元件,所述视觉传感元件设置于所述主体单元的外侧,并与所述控制单元连接,用于获取所述仿生海豚机器装置的周围环境图像;
94.距离监测元件,所述距离监测元件设置于所述主体单元的外侧,并与所述控制单元连接,用于获取所述仿生海豚机器装置的周围环境距离。
95.在其中的一些实施例中,还包括:
96.样品获取单元,所述样品获取单元设置于所述主体单元的底部,并与所述控制单元连接,用于获取所述仿生海豚机器装置的周围环境物质。
97.在其中的一些实施例中,所述样品获取单元包括:
98.容纳元件,所述容纳元件设置于所述主体单元的底部;
99.第二液体输送元件,所述第二液体输送元件设置于所述容纳元件的侧部,与所述容纳元件连通,并与所述控制单元连接,用于将所述容纳元件的内部的液体向所述容纳元件的外部输送;
100.过滤元件,所述过滤元件设置于所述容纳元件的内部,并位于所述第二液体输送元件的上游,用于对所述容纳元件进行固液分离,以使固体停留所述容纳元件的内部;
101.阀元件,所述阀元件设置于所述容纳元件的侧部,并与所述控制单元连接。
102.在其中的一些实施例中,所述容纳元件包括:
103.若干容纳腔,若干所述容纳腔依次设置于所述容纳元件内部,并相互连通,相邻两所述容纳腔之间设置所述过滤元件,每一所述容纳腔对应设置一所述阀元件;
104.其中,在所述第二液体输送元件工作的情况下,至少一所述阀元件开启。
105.第二方面,本发明提供一种用于水下的仿生海豚机器系统,包括:
106.如第一方面所述的仿生海豚机器装置;
107.远程控制装置,所述远程控制装置与所述仿生海豚机器装置通信连接,用于向所述仿生海豚机器装置发送控制指令。
108.本发明采用以上技术方案,与现有技术相比,具有如下技术效果:
109.本发明的一种用于水下的仿生海豚机器装置及系统,通过浮沉单元,在增加自重的同时,利用主体单元的密封结构,压缩主体单元的内部空气,达到改变自重的作用,并改变浮力,实现悬停;通过重心调节单元,改变重心,从而实现上浮、下沉动作;利用浮沉单元和重心调节单元进行配合,提高仿生海豚机器装置在水中游动的自由度和灵活性;仿生海豚机器装置的重心在下半部分,能够在任何角度入水的情况下实现平衡。
附图说明
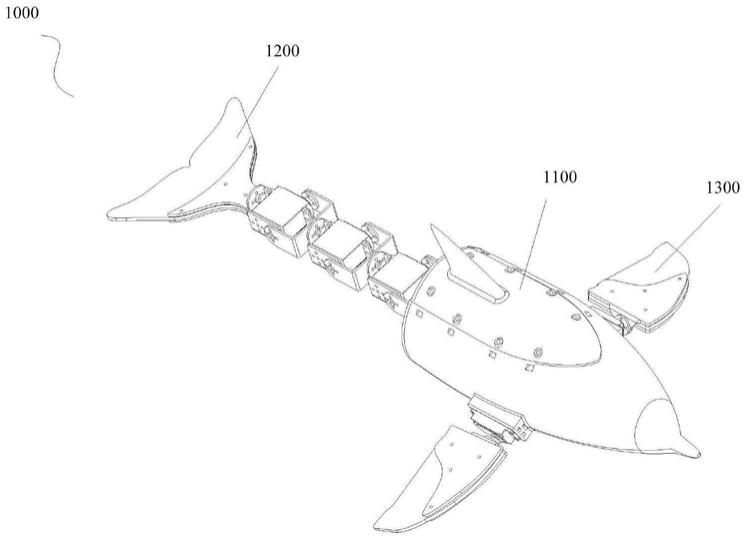
110.图1是根据本发明实施例的仿生海豚机器装置的示意图;
111.图2是根据本发明实施例的仿生海豚机器装置的电路连接框图(一);
112.图3a~3e是根据本发明实施例的主体单元的示意图;
113.图4a~4d是根据本发明实施例的尾鳍单元的示意图(一);
114.图5a~5c是根据本发明实施例的胸鳍单元的示意图(一);
115.图6是根据本发明实施例的浮沉单元的示意图;
116.图7是根据本发明实施例的重心调节单元的示意图;
117.图8是根据本发明实施例的仿生海豚机器系统的电路连接框图;
118.图9a~9b是根据本发明实施例的尾鳍单元的示意图(二);
119.图10a~10b是根据本发明实施例的胸鳍单元的示意图(三);
120.图11是根据本发明实施例的仿生海豚机器装置的电路连接框图(二);
121.图12是根据本发明实施例的图像获取单元的示意图;
122.图13是根据本发明实施例的仿生海豚机器装置的电路连接框图(三);
123.图14a~14b是根据本发明实施例的样品获取单元的剖视图。
124.其中的附图标记为:1000、仿生海豚机器装置;
125.1100、主体单元;1110、第一壳体元件;1111、下壳体;1112、第一开口;1113、第一连
接孔;1114、加强筋;1120、第一安装元件;1130、第二安装元件;1140、通孔元件;1150、第二壳体元件;1151、上壳体;1152、第二开口;1153、第二连接孔;1154、背鳍片;1160、防水元件;1161、防水槽;1162、防水密封圈;1170、连接元件;
126.1200、尾鳍单元;1210、第一驱动元件;1211、第一支架;1212、第二支架;1213、第一驱动电机;1214、第三支架;1220、尾鳍元件;1221、尾鳍片;1222、第一连接支架;1230、第四驱动元件;1231、第四驱动电机;1232、第四支架;
127.1300、胸鳍单元;1310、第二驱动元件;1311、第二驱动电机;1312、第五支架;1320、胸鳍元件;1321、胸鳍片;1322、第二连接支架;1330、第五驱动元件;1331、第六支架;1332、第七支架;1333、第五驱动电机;1334、第八支架;
128.1400、浮沉单元;1410、鱼鳔元件;1420、第一液体输送元件;
129.1500、重心调节单元;1510、第三驱动元件;1520、滑动元件;1530、配重元件;
130.1600、控制单元;
131.1700、图像获取单元;1710、视觉传感元件;1720、距离监测元件;
132.1800、样品获取单元;1810、容纳元件;1811、容纳腔;1820、第二液体输送元件;1830、过滤元件;1840、阀元件;
133.2000、远程控制装置。
具体实施方式
134.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动的前提下所获得的所有其他实施例,都属于本发明保护的范围。
135.需要说明的是,在不冲突的情况下,本发明中的实施例及实施例中的特征可以相互组合。
136.下面结合附图和具体实施例对本发明作进一步说明,但不作为本发明的限定。
137.实施例1
138.如图1~2所示,一种用于水下的仿生海豚机器装置1000,包括主体单元1100、尾鳍单元1200、胸鳍单元1300、浮沉单元1400、重心调节单元1500和控制单元1600。其中,尾鳍单元1200可拆卸地设置于主体单元1100的尾端,其至少进行上下摆动,以使主体单元1100向前移动;胸鳍单元1300对称且可拆卸地设置于主体单元1100的两侧,其至少进行转动,以使主体单元1100改变运动方向;浮沉单元1400设置于主体单元1100的内部,用于调节主体单元1100的重量,以使主体单元1100上浮或下沉;重心调节单元1500设置于主体单元1100的内部,用于调节主体单元1100的重心,以使主体单元1100的头端保持水平、上翘或下翘;控制单元1600分别与尾鳍单元1200、胸鳍单元1300、浮沉单元1400和重心调节单元1500连接,用于控制上述单元的动作。
139.在其中的一些实施例中,仿生海豚机器装置1000的总体长度为864mm、宽度为407mm。
140.如图3a所示,主体单元1100包括第一壳体元件1110、第一安装元件1120、第二安装元件1130、通孔元件1140、第二壳体元件1150、防水元件1160和连接元件1170。其中,第一安
装元件1120设置于第一壳体元件1110的尾端,并与尾鳍单元1200连接;第二安装元件1130对称地设置于第一壳体元件1110的两侧,并与对应的胸鳍单元1300连接;通孔元件1140设置于第一壳体元件1110的表面,用于使尾鳍单元1200、胸鳍单元1300经通孔元件1140与控制单元1600连接,以及使浮沉单元1400与外界连通;第二壳体元件1150可拆卸地设置于第一壳体元件1110的上部,并密封第一壳体元件1110;防水元件1160设置于第一壳体元件1110与第二壳体元件1150的连接位置;连接元件1170依次与第二壳体元件1150、第一壳体元件1110进行可拆卸连接。
141.如图3b~3c所示,第一壳体元件1110包括下壳体1111、第一开口1112和若干第一连接孔1113。其中,下壳体1111的内部设置浮沉单元1400、重心调节单元1500和控制单元1600,并与第二壳体元件1150进行可拆卸连接;第一开口1112设置于下壳体1111的上表面,用于从第一开口1112拆除或放置浮沉单元1400、重心调节单元1500和控制单元1600;若干第一连接孔1113环绕第一开口1112设置,并与连接元件1170进行可拆卸连接。
142.其中,下壳体1111(即第一壳体元件1110)呈流线型设计,并与海豚的形状相同,用于减少主体单元1100在游动时的阻力,增加游动速度,减少能耗。
143.其中,第一开口1112的横截面呈椭圆形设置,其尺寸能够确保浮沉单元1400、重心调节单元1500和控制单元1600的放置和拆除。
144.其中,第一开口1112凸出于下壳体1111的上表面设置。
145.其中,第一连接孔1113为第一螺纹孔。
146.在其中的一些实施例中,第一连接孔1113的数量为4~12个。优选地,第一连接孔1113的数量为6~10个。更优选地,第一连接孔1113的数量为8个。
147.进一步地,第一壳体元件1110还包括加强筋1114,加强筋1114设置于下壳体1111的内部的底部,用于提高下壳体1111的承载水压的能力,防止在深潜时,下壳体1111破裂导致漏水。此外,加强筋1114设置于下壳体1111的底部还可以将主体单元1100(仿生海豚机器装置1000)的重心向下偏移,以确保主体单元1100(仿生海豚机器装置1000)从任何角度入水都可以保持平衡。
148.其中,加强筋1114呈鱼骨状设计,且加强筋1114的横向宽度由其中部向其两端递减。
149.在其中的一些实施例中,加强筋1114为4~12排。优选地,加强筋1114为6~10排。更优选地,加强筋1114为8排。
150.在其中的一些实施例中,加强筋1114的宽度为1~5mm。优选地,加强筋1114的宽度为2~4mm。更优选地,加强筋1114的宽度为3mm。
151.在其中的一些实施例中,加强筋1114的上表面为水平面,用于至少安装和固定重心调节单元1500、控制单元1600。
152.第一安装元件1120设置于下壳体1111的尾端的中部,其呈矩形状,便于固定安装尾鳍单元1200。
153.其中,第一安装元件1120与尾鳍单元1200可以进行卡接、螺栓连接。
154.其中,第一安装元件1120的水平长度大于第一安装元件1120的竖直高度。
155.在其中的一些实施例中,第一安装元件1120为安装块,其表面设置有螺纹孔。
156.在其中的一些实施例中,第一安装元件1120为安装槽,其侧壁设置有螺纹孔、卡接
孔。
157.第二安装元件1130设置于下壳体1111的两侧,并靠近下壳体1111的头端设置,其呈矩形状,便于固定安装胸鳍单元1300。
158.其中,第二安装元件1130与胸鳍单元1300可以进行卡接、螺栓连接。
159.其中,第二安装元件1130的水平长度大于第二安装元件1130的竖直高度。
160.在其中的一些实施例中,第二安装元件1130为安装槽,其侧壁设置有螺纹孔、卡接孔。
161.在其中的一些实施例中,第二安装元件1130为安装块,其表面设置有螺纹孔。
162.通孔元件1140至少设置于下壳体1111的尾端,以使尾鳍单元1200的线缆、胸鳍单元1300的线缆通过该通孔元件1140与下壳体1111的内部的控制单元1600连接,以及使浮沉单元1400通过该通孔元件1140与下壳体1111的外部连通。
163.在其中的一些实施例中,通孔元件1140为一个,其位于第一安装元件1120的上部。
164.在其中的一些实施例中,通孔元件1140还设置于下壳体1111的两侧,并与第二安装元件1130连通(即位于第二安装元件1130的内部),以使胸鳍单元1300的线缆通过该通孔元件1140与下壳体1111的内部的控制单元1600连接。
165.在其中的一些实施例中,通孔元件1140为三个,一个通孔元件1140设置于下壳体1111的尾端并位于第一安装元件1120的上部,两个通孔元件1140设置于下壳体1111的两侧并分别与第二安装元件1130连通(即位于第二安装元件1130的内部)。
166.在其中的一些实施例中,通孔元件1140为四个,一个通孔元件1140设置于下壳体1111的尾端并位于第一安装元件1120的上部用于供浮沉单元1400使用,一个通孔元件1140设置于下壳体1111的尾端并与第一安装元件1120连通(即位于第一安装元件1120的内部)用于供尾鳍单元1200使用,两个通孔元件1140设置于下壳体1111的两侧并分别与第二安装元件1130连通(即位于第二安装元件1130的内部)。
167.如图3d~3e所示,第二壳体元件1150包括上壳体1151、第二开口1152和若干第二连接孔1153。其中,上壳体1151与第一壳体元件1110进行可拆连接;第二开口1152设置于上壳体1151的下表面;若干第二连接孔1153环绕第二开口1152设置,并与连接元件1170进行可拆卸连接。
168.具体地,上壳体1151与下壳体1111进行可拆卸连接,第二开口1152与第一开口1112相对应,若干第二连接孔1153与若干第一连接孔1113相一一对应。其中,在上壳体1151密封下壳体1111的情况下,第二开口1152密封第一开口1112。
169.其中,上壳体1151为密封盖,用于密封下壳体1111,以使上壳体1151与下壳体1111形成密封空间,避免水进入下壳体1111的内部。
170.其中,第二开口1152向内凹陷设置,即在上壳体1151与下壳体1111连接的情况下,第一开口1112伸入第二开口1152。即第一开口1112的外缘抵住第二开口1152的内缘设置。
171.其中,第二开口1152的纵截面呈阶梯状设置,其上开口端的内缘与第一开口1112的外缘相抵接,其下开口端用于与防水元件1160相抵接。
172.其中,第二开口1152的横截面呈椭圆形设置,其尺寸与第一开口1112相配合。
173.其中,第二连接孔1153为第二螺纹孔。
174.在其中的一些实施例中,第二连接孔1153的数量为4~12个。优选地,第二连接孔
1153的数量为6~10个。更优选地,第二连接孔1153的数量为8个。
175.进一步地,第二壳体元件1150还包括背鳍片1154,背鳍片1154设置于上壳体1151的上表面。
176.如图3b~3c所示,防水元件1160包括防水槽1161和防水密封圈1162。其中,防水槽1161设置于第一壳体元件1110的上表面;防水密封圈1162可拆卸地设置于防水槽1161。
177.具体地,防水槽1161环绕第一开口1112设置。
178.在下壳体1111与上壳体1151进行连接的情况下,防水密封圈1162的上表面与第二开口1152的下开口端的上表面/上开口端的下表面相抵接。
179.在其中的一些实施例中,第二开口1152的下开口端的内缘位于防水槽1161的外缘的外侧,即在第二开口1152与防水槽1161的连接位置,其下开口端与防水槽1161的纵截面呈直角形。
180.相对应地,防水密封圈1162的纵截面呈直角形。即防水密封圈1162嵌入防水槽1161,并与下壳体1111的上表面相抵接。
181.连接元件1170依次与对应的第二连接孔1153、第一连接孔1113进行连接,以使上壳体1151与下壳体1111进行连接。
182.其中,连接元件1170为若干个,其数量与第一连接孔1113、第二连接孔1153的数量相同。
183.其中,连接元件1170为螺丝。
184.如图4a所示,尾鳍单元1200包括至少一第一驱动元件1210和尾鳍元件1220。其中,第一驱动元件1210与第一主体单元1100的尾端进行可拆卸连接,并与控制单元1600连接;尾鳍元件1220与第一驱动元件1210固定连接,用于在第一驱动元件1210的作用下进行上下摆动。
185.具体地,第一驱动元件1210与第一安装元件1120进行可拆卸连接。
186.其中,尾鳍单元1200的长度与主体单元1100的长度之比大于等于1,小于等于2。
187.优选地,尾鳍单元1200的长度与主体单元1100的长度之比为1~1.5。更优选地,尾鳍单元1200的长度与主体单元1100的长度之比为1~1.2。更优选地,尾鳍单元1200的长度与主体单元1100的长度之比为1.05~1.1。
188.在其中的一些实施例中,尾鳍单元1200的长度为360mm,主体单元1100的长度为336mm。
189.如图4b所示,第一驱动元件1210包括第一支架1211、第二支架1212、第一驱动电机1213和第三支架1214。其中,第一支架1211与第一安装元件1120进行可拆卸连接;第二支架1212与第一支架1211转动连接;第一驱动电机1213与第二支架1212固定连接,并与第一支架1211转动连接;第三支架1214分别与第二支架1212、尾鳍元件1220固定连接。
190.在其中的一些实施例中,第一支架1211、第二支架1212、第三支架1214由金属材料制成,如铝合金。
191.在其中的一些实施例中,第一驱动电机1213为深水舵机,具有良好的防水能力。
192.在其中的一些实施例中,第一驱动电机1213为cy-t4舵机。
193.其中,第一支架1211为u形支架,其包括第一竖板、第二竖板和第一横板,第一竖板和第二竖板对称地设置于第一横板的两侧,第一横板与第一安装元件1120进行连接,第一
竖板与第二支架1212进行转动连接,第二竖板与第一驱动电机1213的输出轴转动连接。
194.其中,第二支架1212为双u形支架,两个u形成l形设置,其包括第三竖板、第四竖板、第五竖板和第二横板,第三竖板和第四竖板对称地设置于第二横板的一侧,第五竖板相对第三竖板/第四竖板设置于第二横板的另一侧,第三竖板和第四竖板分别与第二驱动电机1311的两侧连接,并卡住第二驱动电机1311,第五竖板与第一支架1211的第一竖板进行转动连接,第二横板分别与第一驱动电机1213、第三支架1214进行固定连接。
195.其中,第三支架1214为l形支架,其包括第三横板和第六竖板,第三横板与第二支架1212的第二横板固定连接,第六竖板与尾鳍元件1220固定连接。
196.具体地,在第一驱动电机1213的作用下,第二支架1212以其与第一支架1211的连接处为中心转动。
197.在其中的一些实施例中,第一驱动元件1210为n个,其中,n为大于等于2的整数。
198.如图4c所示,n个第一驱动元件1210依次连接(头尾连接),位于头端的第一驱动元件1210与主体单元1100的尾端连接(第一安装元件1120),位于尾端的第一驱动元件1210与尾鳍元件1220连接。
199.具体地,第一个第一驱动元件1210的第一支架1211与第一安装元件1120固定连接,第二个第一驱动元件1210的第一支架1211与第一个第一驱动元件1210的第三支架1214固定连接,第n个第一驱动元件1210的第一支架1211与第n-1个第一驱动元件1210的第三支架1214固定连接,第n个第一驱动元件1210的第三支架1214与尾鳍元件1220固定连接。
200.通过设置n个第一驱动元件1210,可以增加尾鳍元件1220进行上下摆动的角度范围,并通过不同第一驱动元件1210的角度组合,可以更为精准地模拟海豚游动,从而提高游动效率。
201.优选地,n为2~6个。更优选地,n为3~5个。最优选地,n为3个。
202.如图4d所示,尾鳍元件1220包括尾鳍片1221和第一连接支架1222。其中,第一连接支架1222分别与尾鳍片1221、第一驱动元件1210的尾端固定连接。
203.具体地,第一连接支架1222与第一驱动元件1210的第三支架1214固定连接。
204.其中,尾鳍片1221的轮廓(形状)与海豚尾部相同(即与海豚尾部等比例缩小或放大设置),确保尾鳍元件1220的拍水推力。
205.在其中的一些实施例中,尾鳍片1221由柔性材料制成,如橡胶、硅胶等,且具有一定的厚度。
206.其中,第一连接支架1222至少呈l形,其包括第七竖板和第四横板,第七竖板与第三支架1214的第六竖板固定连接,第四横板与尾鳍片1221固定连接。
207.在其中的一些实施例中,第一连接支架1222为u形与l形的结合,其包括第七竖板、第四横板和第五横板,第四横板和第五横板对称设置,第四横板和第五横板分别与尾鳍片1221的两侧固定连接,即第四横板与第五横板夹持尾鳍片1221。
208.在其中的一些实施例中,第一连接支架1222由硬质材料制成,如塑料、亚克力等。
209.进一步地,尾鳍单元1200还包括第三壳体元件,第三壳体元件的头端与第一壳体元件1110的尾端连接,第三壳体元件的尾端与尾鳍元件1220连接,其内部设置第一驱动元件1210,用于防止第一驱动元件1210与水接触。
210.其中,第三壳体元件由柔性材料制成,如橡胶、硅胶。在第一驱动元件1210进行转
动的情况下,第三壳体元件进行相应的弯折。
211.如图5a所示,胸鳍单元1300包括两第二驱动元件1310和两胸鳍元件1320。其中,两第二驱动元件1310对称地设置于主体单元1100的两侧,与主体单元1100的侧部进行可拆卸连接,并与控制单元1600连接;两胸鳍元件1320分别与对应的第二驱动元件1310转动连接,用于在第二驱动元件1310的作用下进行转动。
212.具体地,两第二驱动元件1310与对应的第二安装元件1130进行可拆卸连接。
213.如图5b所示,第二驱动元件1310包括第二驱动电机1311,第二驱动电机1311与第二安装元件1130连接,其输出端与对应的胸鳍元件1320连接。
214.在其中的一些实施例中,第二驱动电机1311为深水舵机,具有良好的防水能力。
215.在其中的一些实施例中,第二驱动电机1311为cy-t4舵机。
216.如图5c所示,胸鳍元件1320包括胸鳍片1321和第二连接支架1322。其中,第二连接支架1322分别与胸鳍片1321、第二驱动元件1310的输出端固定连接。
217.具体地,第二连接支架1322与第二驱动电机1311的输出端固定连接。
218.其中,胸鳍片1321的轮廓(形状)与海豚鱼鳍相同(即与海豚鱼鳍等比例缩小或放大设置),确保胸鳍元件1320的划水推力,保证能够迅速转弯。
219.在其中的一些实施例中,胸鳍片1321由柔性材料制成,如橡胶、硅胶等,且具有一定的厚度。
220.其中,第二连接支架1322至少呈l形,其包括第八竖板和第六横板,第八竖板与第三支架1214的第六竖板固定连接,第六横板与胸鳍片1321固定连接。
221.在其中的一些实施例中,第二连接支架1322为u形与l形的结合,其包括第八竖板、第六横板和第七横板,第六横板和第七横板对称设置,第六横板和第七横板分别与胸鳍片1321的两侧固定连接,即第六横板与第七横板夹持胸鳍片1321。
222.在其中的一些实施例中,第二连接支架1322由硬质材料制成,如塑料、亚克力等。
223.进一步地,胸鳍单元1300还包括第四壳体元件,第四壳体元件的头端与第一壳体元件1110的侧部连接,第四壳体元件的尾端与胸鳍元件1320连接,其内部设置第二驱动元件1310,用于防止第二驱动元件1310与水接触。
224.其中,第四壳体元件由柔性材料制成,如橡胶、硅胶。在第二驱动元件1310进行转动的情况下,第四壳体元件进行相应的弯折。
225.如图6所示,浮沉单元1400包括鱼鳔元件1410和第一液体输送元件1420。其中,鱼鳔元件1410设置于主体单元1100的内部;第一液体输送元件1420设置于主体单元1100的内部,第一液体输送元件1420的一端与鱼鳔元件1410连接,第一液体输送元件1420的另一端与主体单元1100的外部连通,并与控制单元1600连接,用于将主体单元1100的外部的液体输送至鱼鳔元件1410的内部、以及将鱼鳔元件1410的内部的液体输送至主体单元1100的外部。
226.具体地,鱼鳔元件1410和第一液体输送元件1420均设置于下壳体1111的内部,第一液体输送元件1420的另一端通过通孔元件1140与下壳体1111的外部连通。
227.在其中的一些实施例中,鱼鳔元件1410由柔性材料制成,如橡胶,能够进行伸缩,且承受一定压力不破裂。
228.在其中的一些实施例中,第一液体输送元件1420为蠕动泵。
229.在其中的一些实施例中,第一液体输送元件1420为nkp-de-b08b。
230.在本发明中,选用蠕动泵而不是叶片泵、离心泵的原因如下:
231.1、无污染:流体只接触泵管,不接触泵体;
232.2、精度高:重复精度,稳定性精度高;
233.3、低剪切力:是输送剪切敏感,侵蚀性强流体的理想工具;
234.4、密封性好:具有良好的自吸能力,可空转,可防止回流;
235.5、维护简单:无阀门和密封件;
236.6、具有双向同等流量输送能力;无液体空运转情况下不会对泵的任何部件造成损害;能产生达98%的真空度;没有阀、机械密封和填料密封装置,也就没有这些产生泄露和维护的因素;能轻松的输送固、液或气液混合相流体,允许流体内所含固体直径达到管状元件内径40%;可输送各种具有研磨、腐蚀、氧敏感特性的物料及各种食品等;仅软管为需要替换的部件,更换操作极为简单;除软管外,所输送产品不与任何部件接触。
237.如图7所示,重心调节单元1500包括第三驱动元件1510、滑动元件1520和配重元件1530。其中,第三驱动元件1510设置与主体单元1100的内部,并与控制单元1600连接;滑动元件1520与第三驱动元件1510连接,用于在第三驱动元件1510的作用下进行直线往复运动;配重元件1530与滑动元件1520连接,用于在滑动元件1520的作用下进行直线往复运动,以调节主体单元1100的重心。
238.具体地,第三驱动元件1510、滑动元件1520和配重元件1530均设置于下壳体1111的内部。
239.第三驱动元件1510包括第三驱动电机,第三驱动电机设置于下壳体1111的内部,并安装于加强筋1114的上表面。
240.在其中的一些实施例中,第三驱动电机为步进电机。
241.在其中的一些实施例中,第三驱动电机为两相4线制微型步进电机。
242.在本发明中,选用步进电机的原因如下:
243.1.易于控制,精确度高
244.2.功率因数高:这个优点的具备与电机的应用的工作原理有关,是因为工作原料非常科学,素以电机才能够到较高的功率因数,能够一下功能方面取得很好的表现。
245.3.运行效率高:凭借着应用的科学工作原理,以及相对比较先进的产品技术,步进电机具备着运行效率高这个优点,这样一来电机在功能方面就非常高效,可以以高效的功能发挥,充分优化设备的运行。
246.4.稳定性好:这个类型电机,在性能及结构方面都非常稳定,在能够在使用当中保持稳定结构的同时,也能够稳定发挥功能,保持统一的运行效果及功能保险。
247.5.能够在转速恒定的情况下,一直在使用当中保持稳定的运转速度,并始终保持稳定的运行效果,这样电机就会在功能方面非常稳定。
248.在其中的一些实施例中,滑动元件1520为丝杠滑台。
249.在其中的一些实施例中,配重元件1530为配重块。
250.控制单元1600设置于下壳体1111的内部,并安装于加强筋1114的上表面。
251.在其中的一些实施例中,控制单元1600为mcu、树莓派、单片机、电路板、arduino板等。
252.在其中的一些实施例中,控制单元1600集成有控制元件、通信元件、定位元件、电源元件等。
253.如图8所示,一种用于水下的仿生海豚机器系统,包括如上所述的仿生海豚机器装置1000和远程控制装置2000。其中,远程控制装置2000与仿生海豚机器装置1000通信连接,用于向仿生海豚机器装置1000发送控制指令。
254.其中,远程控制装置2000与仿生海豚机器装置1000的连接方式包括但不限于移动数据连接(如4g、5g)、蓝牙通信连接。
255.在其中的一些实施例中,远程控制装置2000为智能终端,包括但不限于手机、平板电脑、笔记本电脑、云平台/云服务器。
256.本发明的仿生海豚机器系统的使用方法如下:
257.远程控制装置2000向仿生海豚机器装置1000发送控制指令;
258.在控制指令为“+”(游动速度增加)的情况下,控制单元1600控制第一驱动电机1213的转动频率增加,以提高尾鳍元件1220的摆动速度,从而进行加速运动;
259.在控制指令为
“‑”
(游动速度减少)的情况下,控制单元1600控制第一驱动电机1213的转动频率降低,以减少尾鳍元件1220的摆动速度,从而进行减速运动;
260.在控制指令为“0”(游动速度为0)的情况下,控制单元1600控制第一驱动电机1213停止,以使尾鳍元件1220停止摆动;
261.在控制指令为“u”(上浮)的情况下,控制单元1600控制第一液体输送元件1420启动,将鱼鳔元件1410的水向外排出一定量,且控制单元1600控制第三驱动电机驱动滑动元件1520以使配重元件1530向下壳体1111的后部移动,从而进行上浮运动;
262.在控制指令为“d”(下沉)的情况下,控制单元1600控制第一液体输送元件1420启动,向鱼鳔元件1410的内部注一定量的水,且控制单元1600控制第三驱动电机驱动滑动元件1520以使配重元件1530向下壳体1111的前部移动,从而进行下沉运动;
263.在控制指令为“s”(悬停)的情况下,控制单元1600控制第三驱动电机驱动滑动元件1520以使配重元件1530位于下壳体1111的中部,从而进行悬停运动;
264.在控制指令为“l”(向左转向)的情况下,控制单元1600控制第二驱动电机1311驱动胸鳍元件1320顺时针转动,从而进行左转运动;
265.在控制指令为“r”(向右转向)的情况下,控制单元1600控制第二驱动电机1311驱动胸鳍元件1320逆时针旋转,从而进行右转运动;
266.在控制指令为“h”的情况下,控制单元1600进行复位。
267.本发明的优点在于,通过浮沉单元,在增加自重的同时,利用主体单元的密封结构,压缩主体单元的内部空气,达到改变自重的作用,并改变浮力,实现悬停;通过重心调节单元,改变重心,从而实现上浮、下沉动作;利用浮沉单元和重心调节单元进行配合,提高仿生海豚机器装置在水中游动的自由度和灵活性;仿生海豚机器装置的重心在下半部分,能够在任何角度入水的情况下实现平衡。
268.实施例2
269.本实施例为实施例1的一个变形实施例。本实施例与实施例1的区别在于:尾鳍单元1200的结构不同。
270.本实施例的第一种实施方式,尾鳍单元1200还包括第四驱动元件1230,第四驱动
元件1230分别与第一驱动元件1210、尾鳍元件1220连接,并与控制单元1600连接,用于驱动尾鳍元件1220进行转动。
271.具体地,第四驱动元件1230与第一驱动元件1210的第三支架1214固定连接,第四驱动元件1230的输出端与第一连接支架1222连接。
272.如图9a所示,第四驱动元件1230包括第四驱动电机1231,第四驱动电机1231与第三支架1214固定连接,第四驱动电机1231的输出端与第一连接支架1222连接。
273.在其中的一些实施例中,第四驱动电机1231为深水舵机,具有良好的防水能力。
274.在其中的一些实施例中,第四驱动电机1231为cy-t4舵机。
275.本实施例的第二种实施方式,尾鳍单元1200还包括第四驱动元件1230,第四驱动元件1230分别与主体单元1100的尾端、第一驱动元件1210连接,并与控制单元1600连接,用于驱动尾鳍元件1220进行转动。
276.具体地,第四驱动元件1230与第一安装元件1120连接,第四驱动元件1230的输出端与第一驱动元件1210的第一支架1211转动连接。
277.如图9b所示,第四驱动元件1230包括第四驱动电机1231和第四支架1232。其中,第四驱动电机1231的输出端与第一连接支架1222连接;第四支架1232分别与第一安装元件1120、第四驱动电机1231固定连接。
278.在其中的一些实施例中,第四驱动电机1231为深水舵机,具有良好的防水能力。
279.在其中的一些实施例中,第四驱动电机1231为cy-t4舵机。
280.其中,第四支架1232至少呈l形,其包括第九竖板和第七横板,第九竖板与第一安装元件1120固定连接,第七横板与第四驱动电机1231固定连接。
281.在其中的一些实施例中,第四支架1232还可以呈u形,其包括第九竖板、第七横板和第八横板,第七横板和第八横板对称地设置于第九竖板的两侧,第九竖板与第一安装元件1120固定连接,第七横板、第八横板分别与第四驱动电机1231的两侧固定连接。
282.本实施例的优点在于,在进行上下摆动的基础上,尾鳍单元还可以进行转动,进一步地模拟海豚的运动方式,提高运动效率。
283.实施例3
284.本实施例为实施例1~2的一个变形实施例。本实施例与实施例1~2的区别在于:胸鳍单元1300的结构不同。
285.本实施例的第一种实施方式,胸鳍单元1300还包括第五驱动元件1330,第五驱动元件1330分别与主体单元1100的侧部、第二驱动元件1310连接,并与控制单元1600连接,用于驱动胸鳍元件1320进行上下摆动。
286.具体地,第五驱动元件1330与第二驱动元件1310转动连接,并与胸鳍元件1320固定连接。
287.如图10a所示,第二驱动元件1310包括第二驱动电机1311和第五支架1312。其中,第五支架1312分别与第五驱动元件1330、第二驱动电机1311固定连接。
288.其中,第五支架1312至少呈l形,其包括第十竖板和第九横板,第十竖板与第五驱动元件1330固定连接,第九横板与第二驱动电机1311固定连接。
289.在其中的一些实施例中,第五支架1312还可以呈u形,其包括第十竖板、第九横板和第十横板,第九横板和第十横板对称地设置于第十竖板的两侧,第十竖板与第五驱动元
件1330固定连接,第九横板、第十横板分别与第二驱动电机1311的两侧固定连接。
290.如图10b所示,第五驱动元件1330包括第六支架1331、第七支架1332、第五驱动电机1333和第八支架1334。其中,第六支架1331与主体单元1100的侧部进行可拆卸连接;第七支架1332与第六支架1331转动连接;第五驱动电机1333与第七支架1332固定连接,并与第六支架1331转动连接;第八支架1334分别与第七支架1332、第二驱动元件1310固定连接。
291.具体地,第六支架1331与第一安装元件1120进行可拆卸连接,第八支架1334与第五支架1312固定连接。
292.其中,第六支架1331为u形支架,其包括第十一竖板、第十二竖板和第十一横板,第十一竖板和第十二竖板对称地设置于第十一横板的两侧,第十一横板与第一安装元件1120进行连接,第十一竖板与第七支架1332进行转动连接,第十二竖板与第五驱动电机1333的输出轴转动连接。
293.其中,第七支架1332为双u形支架,两个u形成l形设置,其包括第十三竖板、第十四竖板、第十五竖板和第十二横板,第十三竖板和第十四竖板对称地设置于第十二横板的一侧,第十五竖板相对第十三竖板/第十四竖板设置于第十二横板的另一侧,第十三竖板和第十四竖板分别与第二驱动电机1311的两侧连接,并卡住第二驱动电机1311,第十五竖板与第六支架1331的第十一竖板进行转动连接,第十二横板分别与第五驱动电机1333、第八支架1334进行固定连接。
294.其中,第八支架1334为l形支架,其包括第十三横板和第十六竖板,第十三横板与第七支架1332的第十二横板固定连接,第十六竖板与尾鳍元件1220固定连接。
295.具体地,在第五驱动电机1333的作用下,第七支架1332以其与第六支架1331的连接处为中心转动。
296.本实施例的第二种实施方式,胸鳍单元1300还包括第五驱动元件1330,第五驱动元件1330分别与第二驱动元件1310、胸鳍元件1320连接,并与控制单元1600连接,用于驱动胸鳍元件1320进行上下摆动。
297.具体地,第五驱动元件1330与第二驱动电机1311转动连接。
298.其中,第五驱动元件1330的结构同本实施例的第一种实施方式相同。
299.第六支架1331与第二驱动电机1311的输出端转动连接,第八支架1334与胸鳍元件1320固定连接。
300.本实施例的优点在于,在进行转动的基础上,胸鳍单元还可以进行上下摆动,进一步地模拟海豚的运动方式,提高运动效率。
301.实施例4
302.本实施例为实施例1~3的一个变形实施例。本实施例与实施例1~3的区别在于:仿生海豚机器装置1000还包括图像获取单元1700。
303.如图11所示,图像获取单元1700设置于主体单元1100,并与控制单元1600连接,用于获取仿生海豚机器装置1000的周围环境图像。
304.如图12所示,图像获取单元1700包括视觉传感元件1710和距离监测元件1720。其中,视觉传感元件1710设置于主体单元1100的外侧,并与控制单元1600连接,用于获取仿生海豚机器装置1000的周围环境图像;距离监测元件1720设置于主体单元1100的外侧,并与控制单元1600连接,用于获取仿生海豚机器装置1000的周围环境距离。
305.具体地,视觉传感元件1710设置于下壳体1111的头端和两侧部,距离监测元件1720设置于下壳体1111的头端和两侧部。
306.在其中的一些实施例中,视觉传感元件1710为单目视觉传感器或双目视觉传感器。
307.在其中的一些实施例中,距离监测元件1720为激光雷达。
308.本实施例的优点在于,通过图像获取单元获取仿生海豚机器装置的周围环境图像,便于更好地对仿生海豚机器装置进行控制,避免损坏仿生海豚机器装置。
309.实施例5
310.本实施例为实施例1~4的一个变形实施例。本实施例与实施例1~4的区别在于:仿生海豚机器装置1000还包括样品获取单元1800。
311.如图13所示,样品获取单元1800设置于主体单元1100的底部,并与控制单元1600连接,用于获取仿生海豚机器装置1000的周围环境物质。
312.如图14a所示,样品获取单元1800包括容纳元件1810、第二液体输送元件1820、过滤元件1830和阀元件1840。其中,容纳元件1810设置于主体单元1100的底部;第二液体输送元件1820设置于容纳元件1810的侧部,与容纳元件1810连通,并与控制单元1600连接,用于将容纳元件1810的内部的液体向容纳元件1810的外部输送;过滤元件1830设置于容纳元件1810的内部,并位于第二液体输送元件1820的上游,用于对容纳元件1810进行固液分离,以使固体停留容纳元件1810的内部;阀元件1840设置于容纳元件1810的侧部,并与控制单元1600连接。
313.具体地,容纳元件1810设置于下壳体1111的底部。
314.在其中的一些实施例中,容纳元件1810设置于下壳体1111的底部的中部。
315.在其中的一些实施例中,第二液体输送元件1820为蠕动泵,利用蠕动泵可以进行正反液体输送。
316.具体地,蠕动泵正转时,阀元件1840开启,容纳元件1810的内部最终留下固体;在蠕动泵反转时,阀元件1840关闭,容纳元件1810的内部最终留下液体;在蠕动泵不工作时,阀元件1840开启一定时间后关闭,容纳元件1810的内部最终留下液体和固体的混合物。
317.在其中的一些实施例中,第二液体输送元件1820为nkp-de-b08b。
318.在其中的一些实施例中,过滤元件1830为过滤膜,其仅使水通过,以阻拦固体。
319.在其中的一些实施例中,阀元件1840为电磁阀。
320.本实施方式的使用方法如下:
321.在获取固体时,控制单元1600控制阀元件1840打开,以使固体和液体进入容纳元件1810的内部;
322.控制单元1600控制阀元件1840关闭;
323.控制单元1600控制第二液体输送元件1820工作,以使容纳元件1810的内部的液体经过滤元件1830过滤后排出;
324.控制单元1600控制第二液体输送元件1820停止工作。
325.或者
326.在获取固体时,控制单元1600控制阀元件1840打开,并控制第二液体输送元件1820工作,以使固体和液体进入容纳元件1810的内部;
327.控制单元1600控制阀元件1840关闭;
328.第二液体输送元件1820将容纳元件1810的内部的液体经过滤元件1830过滤后排出;
329.控制单元1600控制第二液体输送元件1820停止工作。
330.在其中的一些实施例中,第二液体输送元件1820也可以不工作,从而使容纳元件1810的颞部储存有固体和液体。
331.如图14b所示,容纳元件1810包括若干容纳腔1811,若干容纳腔1811依次设置于容纳元件1810内部,并相互连通,相邻两容纳腔1811之间设置过滤元件1830,每一容纳腔1811对应设置一阀元件1840;其中,在第二液体输送元件1820工作的情况下,至少一阀元件1840开启。
332.本实施方式的使用方法如下:
333.在第一位置获取固体时,控制单元1600控制第一个阀元件1840打开,以使固体和液体进入该阀元件1840对应的容纳腔1811的内部;
334.控制单元1600控制该阀元件1840关闭;
335.控制单元1600控制第二液体输送元件1820工作,以使该容纳腔1811的内部的液体经过滤元件1830过滤后排出;
336.控制单元1600控制第二液体输送元件1820停止工作;
337.在第二位置获取固体时,控制单元1600控制第二个阀元件1840打开,以使固体和液体进入该阀元件1840对应的容纳腔1811的内部;
338.控制单元1600控制该阀元件1840关闭;
339.控制单元1600控制第二液体输送元件1820工作,以使该容纳腔1811的内部的液体经过滤元件1830过滤后排出;
340.控制单元1600控制第二液体输送元件1820停止工作;
341.不断重复上述步骤,直至全部的容纳腔1811的内部均有固体。
342.或者
343.在第一位置获取固体时,控制单元1600控制第一个阀元件1840打开,并控制第二液体输送元件1820工作,以使固体和液体进入该阀元件1840对应的容纳腔1811的内部;
344.控制单元1600控制该阀元件1840关闭;
345.第二液体输送元件1820将该容纳腔1811的内部的液体经过滤元件1830过滤后排出;
346.控制单元1600控制第二液体输送元件1820停止工作;
347.在第二位置获取固体时,控制单元1600控制第二个阀元件1840打开,并控制第二液体输送元件1820工作,以使固体和液体进入该阀元件1840对应的容纳腔1811的内部;
348.控制单元1600控制该阀元件1840关闭;
349.第二液体输送元件1820将该容纳腔1811的内部的液体经过滤元件1830过滤后排出;
350.控制单元1600控制第二液体输送元件1820停止工作;
351.不断重复上述步骤,直至全部的容纳腔1811的内部均有固体。
352.本实施例的优点在于,在使用仿生海豚机器装置进行水下探测时,利用样品获取
单元可以快速高效地对固液进行分离,以获取固体(固体和液体),便于进行后续研究。
353.以上所述仅为本发明较佳的实施例,并非因此限制本发明的实施方式及保护范围,对于本领域技术人员而言,应当能够意识到凡运用本发明说明书及图示内容所作出的等同替换和显而易见的变化所得到的方案,均应当包含在本发明的保护范围内。