1.本发明涉及无线重联机车技术领域,尤其涉及一种无线重联模式下远程控制单元与制动控制系统的握手方法。
背景技术:
2.当前,由于经济发展的需要,货运铁路的运输量仅靠单个机车牵引列车的编组方式存在多种局限性,采用多个机车重联的方式来牵引列车可以增大列车的牵引力和制动力,满足运输量需求。目前,机车重联分为有线重联和无线重联,无线重联可以将多个机车组网成分布式列车,分布式列车可以使列车获得更好的牵引特性和制动特性。
3.如图1所示,为无线重联分布式列车编组示意图。图1中左侧机车为主控机车(主车),中部机车为从控机车(从车),机车与机车之间为车辆。主车bcu(制动控制系统)主要听从乘务员的手柄动作,从车bcu(制动控制系统)听从从车rcu(远程控制单元)发送的指令,从车rcu通过无线接收主车rcu发送的指令,数据流程如图2所示。
4.在无线重联模式下,从车bcu与手柄和rcu之间都有接口通信,从车rcu什么时候给从车bcu发送指令,从车bcu如何进行选择,以及选择从车rcu后什么时候听从从车rcu发送的指令,这里就需要一个安全的握手机制,以解决前面提出的问题。
技术实现要素:
5.有鉴于此,本发明提供了一种无线重联模式下远程控制单元与制动控制系统的握手方法,能够有效保证从车远程控制单元与制动控制系统之间的通信。
6.本发明提供了一种无线重联模式下远程控制单元与制动控制系统的握手方法,包括:
7.在远程控制单元进入上电模式时,设置远程控制单元送给制动控制系统的标志位远程控制单元使能为false,远程控制单元激活请求为false,远程控制单元激活为false,远程控制单元退出为false;
8.在编组完成,所述远程控制单元进入使能模式时,设置所述远程控制单元使能为true,远程控制单元激活请求为false,远程控制单元激活为false,远程控制单元退出为false;
9.在所述远程控制单元进入使能模式,且所述制动控制系统进入使能模式后,将所述远程控制单元转换到准备模式,设置所述远程控制单元使能为true,远程控制单元激活请求保持预设时间为true的脉冲信号,远程控制单元激活为false,远程控制单元退出为false;
10.在所述远程控制单元进入准备模式,且所述制动控制系统进入准备模式后,将所述远程控制单元转换到操作模式,设置所述述远程控制单元使能为true,远程控制单元激活请求为false,远程控制单元激活为true,远程控制单元退出为false;
11.在所述远程控制单元进入操作模式后,所述远程控制单元与所述制动控制系统建
立握手。
12.优选地,所述方法,还包括:
13.在所述远程控制单元进入使能模式后,且所述制动控制系统进入使能模式前,若进行解编,则将所述远程控制单元由使能模式退回至上电模式。
14.优选地,所述的方法,还包括:
15.在所述远程控制单元进入使能模式后,且所述制动控制系统进入使能模式前,若出现异常情况,则将所述远程控制单元由使能模式进入到退出模式。
16.优选地,所述的方法,还包括:
17.在所述远程控制单元进入准备模式后,且所述制动控制系统进入准备模式前,若进行解编,则将所述远程控制单元由准备模式退回至上电模式。
18.优选地,所述的方法,还包括:
19.在所述远程控制单元进入准备模式后,且所述制动控制系统进入准备模式前,若出现异常情况,则将所述远程控制单元由准备模式进入到退出模式。
20.优选地,所述的方法,还包括:
21.所述远程控制单元与所述制动控制系统建立握手后,若进行解编,则将所述远程控制单元由操作模式退回至上电模式。
22.优选地,所述的方法,还包括:
23.所述远程控制单元与所述制动控制系统建立握手后,若出现异常情况,则将所述远程控制单元由操作模式进入到退出模式。
24.优选地,在若出现异常情况,则将所述远程控制单元由操作模式进入到退出模式后,还包括:
25.若异常情况消除,将所述远程控制单元由退出模式进入到操作模式。
26.优选地,所述的方法,还包括:
27.在所述制动控制系统上电进入手动模式时,设置制动控制系统送给远程控制单元的标志位制动控制系统使能为false,制动控制系统激活为false,制动控制系统推出为true;
28.当使能条件满足后,将所述制动控制系统由手动模式进入使能模型,设置制动控制系统使能为true,制动控制系统激活为false,制动控制系统推出为true;
29.在所述制动控制系统进入使能模式,且所述远程控制单元进入准备模式后,将所述制动控制系统由使能模式转换到准备模式,设置制动控制系统使能为true,制动控制系统激活为true,制动控制系统推出为false;
30.在所述制动控制系统进入准备模式,且所述远程控制单元进入操作模式后,将所述制动控制系统由准备模式转换到操作模式,设置制动控制系统使能为true,制动控制系统激活为true,制动控制系统推出为false;
31.在所述制动控制系统进入操作模式后,所述制动控制系统与所述远程控制单元建立握手。
32.优选地,所述的方法,还包括:
33.在所述制动控制系统进入使能模式后,且所述远程控制单元进入准备模式前,若出现解编,则将所述制动控制系统由使能模式退回至手动模式。
34.优选地,所述的方法,还包括:
35.在所述制动控制系统进入使能模式后,且所述远程控制单元进入准备模式前,若出现异常,则将所述制动控制系统由使能模式退回至手动模式。
36.优选地,所述的方法,还包括:
37.在所述制动控制系统进入准备模式后,且所述远程控制单元进入操作模式前,若出现解编,则将所述制动控制系统由准备模式退回至手动模式。
38.优选地,所述的方法,还包括:
39.在所述制动控制系统进入准备模式后,且所述远程控制单元进入操作模式前,若出现异常,则将所述制动控制系统由准备模式退回至手动模式。
40.优选地,所述的方法,还包括:
41.在所述制动控制系统进入操作模式后,以及所述制动控制系统与所述远程控制单元建立握手后,若进行解编,则将所述制动控制系统由操作模式退回至手动模式。
42.优选地,所述的方法,还包括:
43.在所述制动控制系统进入操作模式后,以及所述制动控制系统与所述远程控制单元建立握手后,若出现异常,则将所述制动控制系统由操作模式退回至手动模式。
44.优选地,在若出现异常,则将所述制动控制系统由操作模式退回至手动模式后,还包括:
45.若异常情况消除,则将所述制动控制系统由手动模式进入到操作模式。
46.综上所述,本发明公开了一种无线重联模式下远程控制单元与制动控制系统的握手方法,在远程控制单元进入上电模式时,设置远程控制单元送给制动控制系统的标志位远程控制单元使能为false,远程控制单元激活请求为false,远程控制单元激活为false,远程控制单元退出为false;在编组完成,远程控制单元进入使能模式时,设置远程控制单元使能为true,远程控制单元激活请求为false,远程控制单元激活为false,远程控制单元退出为false;在远程控制单元进入使能模式,且制动控制系统进入使能模式后,将远程控制单元转换到准备模式,设置远程控制单元使能为true,远程控制单元激活请求保持预设时间为true的脉冲信号,远程控制单元激活为false,远程控制单元退出为false;在远程控制单元进入准备模式,且制动控制系统进入准备模式后,将远程控制单元转换到操作模式,设置所述远程控制单元使能为true,远程控制单元激活请求为false,远程控制单元激活为true,远程控制单元退出为false;在远程控制单元进入操作模式后,远程控制单元与所述制动控制系统建立握手。本发明能够根据无线重联机车的各个阶段将远程控制单元和制动控制系统分成几种控制模式,每种控制模式通过标志位进行区分,通过远程控制单元和制动控制系统之间的配合完成各自模式之间的切换,在都变成操纵模式后,完成最终的握手。
附图说明
47.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
48.图1为本发明公开的无线重联分布式列车编组示意图;
49.图2为本发明公开的无线重联分布式列车远程控制单元和制动控制系统之间的指令传输示意图;
50.图3为本发明公开的一种无线重联模式下远程控制单元与制动控制系统的握手方法实施例1的方法流程图;
51.图4为本发明公开的一种无线重联模式下远程控制单元与制动控制系统的握手方法实施例2的方法流程图;
52.图5为本发明公开的一种无线重联模式下远程控制单元与制动控制系统的握手方法实施例3的方法流程图。
具体实施方式
53.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
54.本方法适用于加装有远程控制单元(rcu)和制动控制系统(bcu)的无线重联机车。根据rcu与bcu之间的握手流程阶段,rcu和bcu分别设置几种不同的控制模式,bcu分为手动模式、使能模式、准备模式、操纵模式;rcu分为上电模式,使能模式、准备模式、操作模式、退出模式。需要rcu与bcu之间的配合才能完成各自模式之间的切换,都变成操纵模式后,才完成最终的握手。通过rcu与bcu协商好的标志位信号进行实现,rcu送给bcu的标志位为远程控制单元使能(rcu enable)、远程控制单元激活请求(rcu active request)、远程控制单元激活(rcu active)、远程控制单元退出(rcu exited),bcu送给rcu的标志位为制动控制系统使能(bcu enable)、制动控制系统激活bcu active、制动控制系统退出(bcu exited)。
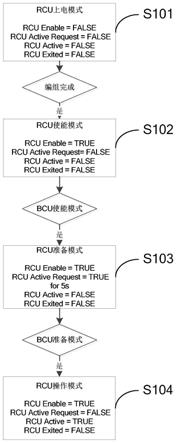
55.如图3所示,为本发明公开的一种无线重联模式下远程控制单元与制动控制系统的握手方法实施例1的方法流程图,所述方法可以包括以下步骤:
56.s101、在远程控制单元进入上电模式时,设置远程控制单元送给制动控制系统的标志位远程控制单元使能为false,远程控制单元激活请求为false,远程控制单元激活为false,远程控制单元退出为false;
57.s102、在编组完成,远程控制单元进入使能模式时,设置远程控制单元使能为true,远程控制单元激活请求为false,远程控制单元激活为false,远程控制单元退出为false;
58.s103、在远程控制单元进入使能模式,且制动控制系统进入使能模式后,将远程控制单元转换到准备模式,设置远程控制单元使能为true,远程控制单元激活请求保持预设时间为true的脉冲信号,远程控制单元激活为false,远程控制单元退出为false;
59.s104、在远程控制单元进入准备模式,且制动控制系统进入准备模式后,将远程控制单元转换到操作模式,设置远程控制单元使能为true,远程控制单元激活请求为false,远程控制单元激活为true,远程控制单元退出为false;在远程控制单元进入操作模式后,远程控制单元与制动控制系统建立握手。
60.在上述实施例中,rcu在上电后编组前进入上电模式,设置rcu enable为false,rcu active request为false,rcu active为false,rcu exited为false。
61.rcu处在上电模式时,进行编组,编组完成后进入使能模式;设置rcu enable为true,rcu active request为false,rcu active为false,rcu exited为false。
62.rcu进入使能模式后,等待bcu进入使能模式,当bcu进入使能模式后,rcu转换到准备模式;设置rcu enable为true,rcu active request保持5s为true的脉冲信号,rcu active为false,rcu exited为false。
63.rcu进入准备模式后,等待bcu进入准备模式,当bcu进入到准备模式后,rcu转换到操作模式;设置rcu enable为true,rcu active request为false,rcu active为true,rcu exited为false。
64.rcu进入操作模式后,表示与bcu握手成功,可以进行正常的数据收发及相关控制,从车rcu可以给bcu发送指令。
65.如图4所示,为本发明公开的一种无线重联模式下远程控制单元与制动控制系统的握手方法实施例2的方法流程图,本实施例公开的无线重联模式下远程控制单元与制动控制系统的握手过程如下:
66.1)、rcu在上电后编组前进入上电模式,设置rcu enable为false,rcu active request为false,rcu active为false,rcu exited为false。
67.2)、rcu处在上电模式时,进行编组,编组完成后进入使能模式;设置rcu enable为true,rcu active request为false,rcu active为false,rcu exited为false。
68.3)、rcu进入使能模式后,等待bcu进入使能模式,期间若进行解编,则rcu退回到上电模式,若出现异常情况,则进入到rcu退出模式,当bcu进入使能模式后,rcu转换到准备模式;设置rcu enable为true,rcu active request保持5s为true的脉冲信号,rcu active为false,rcu exited为false。
69.4)、rcu进入准备模式后,等待bcu进入准备模式,期间若进行解编,则rcu退回到上电模式,若出现异常情况,则进入到rcu退出模式,当bcu进入到准备模式后,rcu转换到操作模式;设置rcu enable为true,rcu active request为false,rcu active为true,rcu exited为false。
70.5)、rcu进入操作模式后,表示与bcu握手成功,可以进行正常的数据收发及相关控制,从车rcu可以给bcu发送指令。期间若进行解编,则rcu退回到上电模式,若出现异常情况,则进入到rcu退出模式。设置rcu enable为false,rcu active request为false,rcu active为false,rcu exited为true。
71.6)、rcu由于异常情况进入到退出模式后,等待异常情况的消除,期间若进行解编,则rcu退回到上电模式,当异常情况消除后,进入rcu使能模式,进入到第3)步,继续进行下一步流程。
72.在上述实施例中,异常情况主要包括rcu与bcu之间的通信中断,严重故障等。
73.如图5所示,为本发明公开的一种无线重联模式下远程控制单元与制动控制系统的握手方法实施例3的方法流程图,本实施例公开的无线重联模式下远程控制单元与制动控制系统的握手过程如下:
74.1)、bcu在上电后进入bcu手动模式。其中,设置标记位bcu enable为false,bcu active为false,bcu exited为true。手动模式下从车bcu选择机车手柄值。
75.2)、bcu手动模式下,当使能条件满足后,bcu进入使能模式。使能条件包括无异常
情况(与rcu通信中断、严重故障等)。其中,设置标记位bcu enable为true,bcu active为false,bcu exited为true。使能模式下从车bcu选择机车手柄值。
76.3)、bcu进入使能模式后,等待rcu进入准备模式,期间若进行解编或者出现异常情况,则退回到手动模式,当rcu进入准备模式后,bcu转换到准备模式。其中,设置标记位bcu enable为true,bcu active为true,bcu exited为false。准备模式下从车bcu选择机车手柄值。
77.4)、bcu进入准备模式后,等待rcu进入操作模式,期间若进行解编或者出现呢异常情况,则退回到手动模式,当rcu进入操作模式后,bcu转换到操作模式。其中,设置标记位bcu enable为true,bcu active为true,bcu exited为false。操作模式下从车bcu选择从车rcu的指令。
78.5)、bcu进入到操作模式后,表示与rcu握手成功,可以进行正常的数据收发及相关控制,从车bcu听从rcu发送的指令。期间若进行解编或者出现异常情况,则rcu退回到手动模式。
79.综上所述,本发明提供的一种无线重联模式下远程控制单元与制动控制系统的握手方法,根据设备的各个阶段将rcu和bcu分成几种控制模式,每种控制模式通过标志位进行区分,通过rcu与bcu之间的配合完成各自模式之间的切换,都变成操纵模式后,表明握手成功,完成最终的握手,并能考虑编组、解编、以及通信中断、严重故障等异常情况下的处理方法,提高了系统安全及可靠性。本发明的握手机制做了非常严格的控制,同时考虑解编以及所有的异常情况下的处理逻辑,能够确保在设备正常时才能进入握手成功状态,双方设备才参与正常工作,在出现异常时可以随时退出,并进行一个安全导向处理。
80.本说明书中各个实施例采用递进的方式描述,每个实施例重点说明的都是与其他实施例的不同之处,各个实施例之间相同相似部分互相参见即可。对于实施例公开的装置而言,由于其与实施例公开的方法相对应,所以描述的比较简单,相关之处参见方法部分说明即可。
81.专业人员还可以进一步意识到,结合本文中所公开的实施例描述的各示例的单元及算法步骤,能够以电子硬件、计算机软件或者二者的结合来实现,为了清楚地说明硬件和软件的可互换性,在上述说明中已经按照功能一般性地描述了各示例的组成及步骤。这些功能究竟以硬件还是软件方式来执行,取决于技术方案的特定应用和设计约束条件。专业技术人员可以对每个特定的应用来使用不同方法来实现所描述的功能,但是这种实现不应认为超出本发明的范围。
82.结合本文中所公开的实施例描述的方法或算法的步骤可以直接用硬件、处理器执行的软件模块,或者二者的结合来实施。软件模块可以置于随机存储器(ram)、内存、只读存储器(rom)、电可编程rom、电可擦除可编程rom、寄存器、硬盘、可移动磁盘、cd-rom、或技术领域内所公知的任意其它形式的存储介质中。
83.对所公开的实施例的上述说明,使本领域专业技术人员能够实现或使用本发明。对这些实施例的多种修改对本领域的专业技术人员来说将是显而易见的,本文中所定义的一般原理可以在不脱离本发明的精神或范围的情况下,在其它实施例中实现。因此,本发明将不会被限制于本文所示的这些实施例,而是要符合与本文所公开的原理和新颖特点相一致的最宽的范围。